Obemannade luftfarkoster (UAV), eller drönare, förändrar det moderna jordbruket genom att ge snabba flygbilder av fält. De används för att skanna grödor för att se om de har hälsa, tillväxtstadium, skadedjur, ogräs och uppskatta avkastning. Till exempel har Kina nu över 250 000 jordbruksdrönare i drift, och i Thailand täcktes cirka 301 000 ton jordbruksmark med drönarbesprutning eller -övervakning år 2023. Dessa drönare gör jordbruket mer effektivt genom att snabbt upptäcka problem (som skadedjursutbrott eller vattenstress) som kan missas på marken.
Små drönare har dock mycket begränsad inbyggd datorkraft och batteritid. Att köra komplexa AI-visionsalgoritmer på dem i realtid är därför en utmaning. Traditionella lättviktsmodeller för objektdetektering (som små YOLO- eller MobileNet-baserade detektorer) kan bara delvis uppfylla dessa behov: de offrar ofta noggrannhet eller hastighet och kräver betydande manuell justering. Denna lucka motiverar implementeringsmedveten Neural Architecture Search (NAS): en automatiserad designmetod som skräddarsyr djupinlärningsmodeller till de exakta kraven hos fältutplacerade drönare.
Modernt precisionsjordbruk använder drönare (UAV:er) för att kartlägga fält och övervaka grödornas skick. Genom att flyga över stora områden kan drönare samla in högupplösta bilder av växter, jord och fältmönster. Dessa bilder matas till datorseendealgoritmer som upptäcker ogräs bland grödor, uppskattar avkastning (t.ex. räknar frukter eller huvuden) eller upptäcker tidiga tecken på sjukdom eller näringsbrist. Drönare möjliggör till exempel riktad herbicidbesprutning på ogräsfält, vilket minskar kemikalieanvändningen och kostnaderna.
De små inbyggda datorerna i drönare (ofta begränsade till några få watt) har dock svårt att köra stora neurala nätverk i flyghastighet. Detta gör det svårt att göra realtidsanalyser: om en drönare ser ett problem måste den reagera snabbt eller logga data innan batteriet tar slut. Nuvarande lättviktsdetektorer (t.ex. YOLOv8 nano, YOLO-tiny, MobileNets) är designade för hand och innebär ofta kompromisser: att göra en modell mindre snabbar upp den, men kan försämra noggrannheten.
Som ett resultat finns det ett starkt behov av metoder som automatiskt hittar den bästa möjliga modellen givet drönarens begränsningar. En driftsättningsmedveten NAS uppfyller detta behov genom att söka efter neurala nätverksarkitekturer som gemensamt optimerar detekteringsnoggrannhet och resursanvändning (latens, strömförbrukning, minne) under verkliga drönarförhållanden. Denna metod kan leverera specialiserade modeller som körs effektivt på drönarhårdvara men ändå förblir mycket noggranna för grödövervakningsuppgifter.
Krav för detektion av UAV-objekt vid grödövervakning
Jordbruks-drönare utför en rad visuella detekteringsuppgifter, var och en med sina egna krav:
1. Grödans hälsa och stressdetektering: Drönare använder RGB-, värme- eller multispektrala kameror för att identifiera stressade växter, näringsbrister eller sjukdomssymptom. Realtidsalgoritmer kan kartlägga variationer i fält och vägleda bevattning eller gödsling. Noggrann detektering av stresstecken på växter möjliggör snabba insatser för att spara avkastning.
2. Ogräsidentifiering: Genom att upptäcka ogräs bland grödor kan jordbrukare bara spruta oönskade växter, vilket sparar herbicider. Till exempel använde en studie på bomullsfält UAV-bilder med en YOLOv7-baserad detektor och uppnådde en noggrannhet på cirka 83% vid separering av ogräs från bomull. Ändå är det fortfarande svårt att skilja visuellt liknande ogräs och grödor åt i röriga fältbilder.

3. Skadedjurs- och sjukdomsdetektering: Drönare kan upptäcka utbrott (t.ex. gräshoppor, insekter eller svampangrepp) tidigare än människor till fots. Drönare stöder också kartläggning av skadedjursangripna zoner via multispektral avbildning, vilket förbättrar enbart RGB. Snabb och noggrann skadedjursdetektering är avgörande för att förhindra spridning.
4. Avkastningsuppskattning: Att räkna frukter, ax eller plantor från luften hjälper till att förutsäga skördevolymer. Modeller som tränats för att upptäcka äpplen, meloner eller veteax på drönarbilder kan påskynda avkastningsuppskattningen. Till exempel har neurala nätverk på drönarbilder använts för att räkna vattenmelon- och melongrödor på fält.
5. Kartläggning och lantmäteri: Drönare skapar också fältkartor (topografi, jordmånsskillnader) som hjälper till att planera odling. Även om det inte strikt sett handlar om objektdetektering, ingår detta i drönarövervakningen.
Dessa uppgifter kräver ofta slutsatser i nära realtid: en drönare som flyger över fält kan behöva bearbeta videobildrutor i farten (flera bildrutor per sekund) så att kontrollbeslut (som att justera höjd eller aktivera en spruta) kan fattas omedelbart. I andra fall kan små fördröjningar (sekunder) vara acceptabla om data loggas och analyseras efter landning.
Viktigt är att drönares synförmåga måste hantera miljövariationer: starkt solljus, skuggor, vindinducerad rörelseoskärpa, ocklusion av överlappande löv eller förändringar i höjd och vinkel. Objektstorlekar varierar (ogräs på nära håll kontra skadedjurskluster på avstånd), så detektorer måste hantera funktioner i flera skalor.
Slutligen innebär drönare inom jordbruket strikta avvägningar mellan noggrannhet, latens och energi. Hög detekteringsnoggrannhet behövs för att undvika att missa ogräs eller skadedjur, men att använda ett mycket djupt nätverk kan tömma batteriet snabbt. En detekteringsmodell måste därför vara snabb och energieffektiv samtidigt som den är tillräckligt noggrann för uppgiften. Dessa stränga krav belyser varför specialiserad modelldesign behövs för drönare inom jordbruket.
Lätta objektdetektorer för UAV-plattformar
Lätta objektdetektorer är neurala nätverk som är specifikt utformade för att köras på begränsad hårdvara. De använder ofta små stamnät (som MobileNet eller ShuffleNet), reducerade lagerbredder eller förenklade hals-/huvuddesigner. Till exempel inkluderar YOLO-familjemodeller "nano"- och "tiny"-versioner (t.ex. YOLOv8n, YOLOv5s) som har färre parametrar och kräver färre operationer (FLOP).
Sådana detektorer kan köras med tiotals bildrutor per sekund på inbyggd hårdvara som NVIDIA Jetson Nano eller Google Coral. Till exempel var Ag-YOLO en specialanpassad YOLO-baserad detektor för palmplantager som kördes med 36,5 fps på en Intel Neural Compute Stick 2 (med endast 1,5 W) och uppnådde hög noggrannhet (F1 = 0,9205). Denna modell använde cirka 12 gånger färre parametrar än YOLOv3-Tiny samtidigt som den fördubblade sin hastighet.

Dessa exempel visar avvägningarna i modelldesign: att minska en modells storlek eller komplexitet (t.ex. färre lager eller kanaler) brukar vanligtvis öka inferensen och minska energiförbrukningen, men kan minska noggrannheten. Ag-YOLO offrade viss kapacitet för att öka hastighet och effektivitet, men bibehöll ändå ett högt F1-resultat på 0,92 på sin uppgift.
På liknande sätt jämfördes tre YOLOv7-varianter för ogräsdetektering: den fullständiga YOLOv7 uppnådde 83%-noggrannhet, medan ett mindre YOLOv7-w6-nät sjönk till 63%-noggrannhet. Detta illustrerar en begränsning hos generiska lättviktsdetektorer: modeller som är inställda för en miljö eller objekttyp kan prestera sämre på en annan. En detektor som är nedbantad för hastighet kan missa subtila signaler (t.ex. små eller kamouflerade ogräs), vilket försämrar robustheten under varierande förhållanden.
Inom jordbruket kanske dessa generiska lättviktsnätverk inte är optimala utan ytterligare justeringar. Till exempel kanske en YOLOv7-modell som är förtränad på vanliga datamängder inte hanterar de unika texturerna och skalorna hos grödbilder perfekt. Därför finns det ett behov av uppgifts- och plattformsspecifik optimering av modellarkitekturen. Manuell justering (byte av lager, filter etc.) för varje ny drönartyp eller grödsort är arbetsintensiv. Detta motiverar automatiserade metoder – såsom driftsättningsmedvetna NAS – för att hitta den bästa balansen mellan storlek, noggrannhet och robusthet för en given UAV-plattform och jordbrukstillämpning.
Neural arkitektursökning i UAV-baserade visionssystem
Neural Architecture Search (NAS) är en automatiserad metod för att designa neurala nätverksarkitekturer. Istället för att manuellt ställa in antalet lager, filter och anslutningar använder NAS algoritmer (förstärkningsinlärning, evolutionära metoder eller gradientbaserad sökning) för att utforska ett utrymme av möjliga designer och hitta de som optimerar ett valt mål (som noggrannhet).
NAS har redan använts för att skapa mobilvänliga nätverk. Till exempel var Googles MnasNet en banbrytande "plattformsmedveten" NAS som direkt inkluderade verklig enhetslatens i målet. MnasNet mätte inferenstiden på en Google Pixel-telefon för varje kandidatmodell under sökningen och balanserade noggrannheten mot denna uppmätta latens. Resultatet blev en familj av CNN-nätverk som var både snabba och exakta på mobil hårdvara och överträffade manuellt designade MobileNets och NASNet-modeller på ImageNet.
Generiska NAS-metoder som MnasNet fokuserar dock på generella visionsuppgifter (ImageNet-klassificering eller COCO-detektering) och allmän hårdvara (t.ex. mobiltelefoner). För övervakning av grödor med drönare är problemet mer specialiserat. Vi vill ha detektorer som är optimerade för specifika objektklasser (växter, ogräs, skadedjur) och skräddarsydda för drönarens sensorer och flygprofil. En standard-NAS som endast optimerar för noggrannhet eller generisk latens kan förbise nyanser som detektering av små objekt eller energibegränsningar.
Dessutom kan traditionella NAS-metoder vara mycket beräkningsmässigt dyra (vilket ofta kräver dagar på stora GPU-kluster), vilket inte alltid är praktiskt för jordbruksforskare. Därför behövs uppgiftsspecifika NAS-ramverk för UAV-seende. Dessa måste innehålla UAV-relevanta kriterier och vara så effektiva som möjligt.
I samtliga fall är medvetenhet om begränsningar avgörande: NAS:en måste vara medveten om målenhetens begränsningar (liknande MnasNet) och realtidskraven för UAV-uppgifter under flygning. Om sökningen är för långsam eller ignorerar energiförbrukningen kanske den resulterande modellen inte fungerar bra i fält.
I praktiken skulle NAS för UAV-vision inkludera hårdvarufördröjning och energi direkt i sökmetriken. Till exempel skulle man kunna mäta en kandidatdetektors bildfrekvens på den faktiska drönardatorn (som en NVIDIA Jetson) och använda det som en poäng. Detta står i kontrast till att använda enkla proxyservrar som FLOP, som inte fångar verklig hastighet.
Genom att göra det kan NAS:en upptäcka arkitekturer som bäst utnyttjar enhetens funktioner. Sammanfattningsvis erbjuder NAS ett sätt att automatiskt designa detektorer för drönare, men det måste anpassas för att ta hänsyn till drönarespecifika uppgifter och effektivitetskrav.
Implementeringsmedveten NAS: Kärnprinciper
En driftsättningsmedveten NAS utökar hårdvarumedveten NAS genom att inkludera driftsättningskontext och miljöbegränsningar i designprocessen. Med andra ord tar den inte bara hänsyn till drönarens hårdvara (CPU/GPU-hastighet, minnesgränser, energibudget) utan också till vad drönaren faktiskt kommer att stöta på i fält. Detta innebär att explicit optimera för mätvärden som inferenslatens på målenheten, strömförbrukning och minnesavtryck, samtidigt som man fortfarande eftersträvar hög detekteringsnoggrannhet.
Till exempel, under NAS skulle man kunna driftsätta varje kandidatmodell på en Jetson Nano kopplad till drönaren och registrera dess verkliga inferensförbrukning av tid och energi. Denna empiriska feedback hjälper till att vägleda sökningen mot modeller som verkligen uppfyller driftsättningskriterierna.
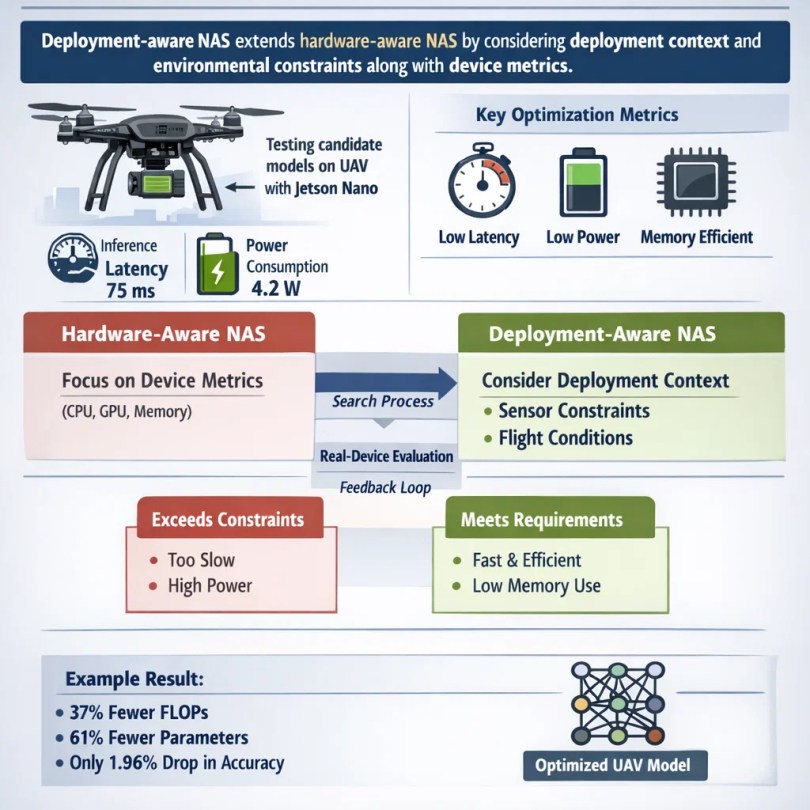
Hårdvarumedvetna NAS (som MnasNet) fokuserar på enhetsstatistik, medan driftsättningsmedvetna NAS går längre: de kan ta hänsyn till sensorns ingångsegenskaper (t.ex. bildupplösning, multispektrala kanaler) och applikationslatensmål (antal bildrutor per sekund som behövs). De kan till och med inkludera flygbegränsningar som maximalt tillåtet minne eller inkludera utvärderingar under simulerade vindskakningar eller rörelseoskärpa.
En driftsättningsmedveten NAS kan missgynna arkitekturer som överskrider, säg, 5 W strömförbrukning eller som behöver mer minne än vad drönaren har. Genom att göra det snedvrids sökningen naturligt mot praktiska modeller för drönarens fältoperationer. I grund och botten handlar en driftsättningsmedveten NAS om att sluta loopen mellan modelldesign och verklig användning. Snarare än att välja en arkitektur isolerat och hoppas att den fungerar, inkluderar den systematiskt testning av verkliga enheter under sökningen.
Till exempel använde Kerec et al. (2026) ett sådant ramverk för att söka efter en UAV-detektor: de byggde på en YOLOv8n-baslinje men inkluderade Jetson Nano-latens och energi i sökningen. Den resulterande modellen hade 37% färre GFLOP:er och 61% färre parametrar än YOLOv8n, med endast en minskning av mAP på 1,96%. Detta visar tydligt hur distributionsbegränsningar styrde NAS:en till ett mycket lättare och snabbare nätverk.
Rollen av driftsättningsmedveten NAS i övervakning av precisionsjordbruk
En driftsättningsmedveten NAS kan avsevärt förbättra övervakningen av drönares grödor genom att skräddarsy detektorer till jordbruksförhållanden. Till exempel kan en sökning gynna arkitekturer som utmärker sig vid att upptäcka små, tunna objekt (som smala ogräs eller tunna majsplantor) eller vid att skilja växter från jordbakgrund. Den kan justera nätverksdjup och receptiva fält till den typiska flyghöjden: på låg höjd fyller objekt bilden och kan kräva fina detaljer, medan nätverket på högre höjd bör vara bra på småskalig detektion. En driftsättningsmedveten NAS kan koda dessa krav i sitt sökutrymme.
Hastighet är avgörande i fält. Tänk dig att en drönare upptäcker ett skadedjursutbrott; om modellen är tillräckligt snabb för att bearbeta video i, säg, 30 fps, kan den varna piloten eller utlösa en omedelbar behandlingsåtgärd. I tester körde en NAS-designad modell 28% snabbare på en Jetson Nano än standard YOLOv8n, tack vare dess optimerade arkitektur. Den förbrukade också 18,5% mindre energi under ONNX-körtid, vilket innebär att drönaren kan flyga längre på samma batteri. Dessa vinster gör beslutsfattande under flygning mer genomförbart och förlänger uppdragets varaktighet.
Robusthet är en annan fördel. Eftersom en driftsättningsmedveten NAS involverar faktisk enhetsutvärdering kan sökningen inkludera tester under varierande förhållanden. Den kan till exempel simulera svagt ljus eller inkludera träningsbilder från gryning och skymning, vilket säkerställer att den slutliga detektorn bibehåller noggrannhet under verkliga väder- och ljusförändringar. Arbetet visade att den NAS-baserade detektorn generaliserade väl: de testade den på två olika gröddataset (vetehuvuden och bomullsplantor) och fann stark prestanda för båda.

Detta tyder på att driftsättningsmedvetna NAS hjälpte till att hitta gemensamma, användbara funktioner för jordbruket, vilket förbättrade generaliseringen till nya fält. Sammantaget bidrar driftsättningsmedvetna NAS till att balansera noggrannhet med längre flygtid. Genom att minska beräkningsbehovet förbrukar drönare mindre ström och kan täcka ett större område per batteriladdning, samtidigt som de fortfarande upptäcker grödor och skadedjur på ett tillförlitligt sätt.
Sökutrymmesdesign för jordbruks-UAV-detektorer
En viktig del av en driftsättningsmedveten NAS är sökutrymmet – den uppsättning möjliga nätverksdesigner som beaktas. För UAV-gröddetektorer kan sökutrymmet utformas för att inkludera lovande arkitekturer för detta område. Viktiga delar inkluderar:
1. Ryggradsdesign: Ryggraden är funktionsextraktorn. För drönare kan man inkludera lätta faltningsbyggstenar såsom djupvis separerbara faltningar (som används i MobileNet), eller inverterade residualblock. Inverterade residualer och linjära flaskhalsar (MobileNetV2-stil) är välkända för mobil effektivitet. Sökutrymmet kan tillåta variation av bredden (antalet kanaler) och djupet för varje block för att matcha drönarens beräkningsbudget. Uppmärksamhets- eller transformatorinspirerade moduler kan också inkluderas om drönaren har råd med dem vid låg effekt.
2. Halsdesign: Många objektdetektorer använder funktionspyramider (FPN) eller vägaggregeringsnätverk för att kombinera flerskaliga funktioner. Sökningen skulle kunna utforska förenklade FPN eller lättviktig funktionsaggregering. Till exempel kan användning av ett enskaligt huvud kontra flerskaliga huvuden vara alternativ. Utrymmet kan möjliggöra poolning av lager eller hoppa över kopplingar som hjälper till att detektera objekt i olika storlekar.
3. Huvuddesign: Detektionshuvudet (klassificerings- och boxregressionslager) kan också varieras. För drönare som tittar på enhetliga fält kan ett enklare huvud räcka. Men för att upptäcka små ogräs kan sökningen inkludera extra faltningslager eller olika ankarscheman.
4. Lättviktsoperationer: Sökutrymmet kan explicit endast tillåta lågkostnadsoperationer. Till exempel att välja mellan en 3×3-konvertering kontra en billigare 1×3+3×1 faktoriserad konvertering, eller att inkludera GhostNet-moduler. Det kan också tillåta små kärnstorlekar eller reducerade dimensioner för att begränsa beräkningen. Alla dessa val styrs av hårdvaran. Utrymmet kan förbjuda lagerkonfigurationer som överskrider drönarens minnesgräns eller förväntade energitröskel.
Genom att noggrant utforma detta sökutrymme styrs NAS-processen mot effektiva men ändå ändamålsenliga arkitekturer. Resultatet kan bli en ny kombination av block som inte beaktas i standardmodeller. Den bäst funna detektorn använde anpassade blockval som minskade GFLOP med 37% och parametrar med 61% jämfört med YOLOv8n.
Detta var möjligt eftersom NAS-enheten kunde blanda och matcha stam- och huvudelement under UAV-begränsningarna. Sammanfattningsvis fokuserar sökområdet för jordbruks-UAV-detektorer på skalbara, lätta byggstenar och hantering i flera skalor, allt inom gränserna för den inbyggda hårdvaran.
Optimeringsmål och begränsningar
En driftsättningsmedveten NAS måste jonglera flera mål. Det primära målet är vanligtvis detektionsnoggrannhet (t.ex. genomsnittlig precision, mAP), mätt på grödövervakningsdataset. Till exempel är mAP@50 (noggrannhet vid 50% IOU) ett vanligt mått. Den NAS-optimerade modellen hade bara en minskning på 1,96% i mAP@50 jämfört med bas-YOLOv8n, en mycket liten förlust för de uppnådda vinsterna. Precision och återkallelse (eller F1-poäng) på nyckelklasser (ogräs, grödor) beaktas också.
Samtidigt måste latens och energi optimeras. Latens är inferenstiden per bild; för en inbäddad GPU kan den vara 20–50 ms eller mer. Lägre latens innebär högre bildhastigheter. Energiförbrukning (joule per bildruta) är avgörande för flyguthållighet. Minnesutrymme (antal parametrar, modellstorlek) är en annan begränsning; modeller måste passa in i enhetens RAM-minne. Därför sätter NAS vanligtvis ett mål eller en straffavgift för dessa begränsningar.
Till exempel kan alla modeller som är långsammare än ett visst tröskelvärde eller över en parameterbudget nedgraderas. Detta förvandlar NAS i praktiken till ett optimeringsproblem med flera mål: maximera noggrannhet samtidigt som latens, energi och storlek minimeras.
I praktiken skulle detta kunna göras genom en viktad summa av mål eller genom hårda begränsningar. Vissa metoder ger en stor straffavgift till alla kandidater som överskrider drönarens effektgräns. Andra beräknar explicit ett energimått: modeller testades under ONNX-körning för att mäta "energieffektivitet", och den bästa modellen var +18,5% mer energieffektiv än YOLOv8n. Detta var ett av målen som vägledde deras sökning.
De avvägningar som hittats kan visualiseras på en Pareto-gränslinje: i ena änden, extremt snabba små modeller med lägre noggrannhet; i den andra, stora, exakta modeller som är för långsamma eller strömslukande för en drönare. En driftsättningsmedveten NAS syftar till att hitta en optimal punkt på denna gränslinje som matchar de verkliga uppdragsprioriteringarna (t.ex. liten noggrannhetsförlust för en stor hastighetsökning). Sammanfattningsvis måste NAS:en beakta noggrannhetsmått (mAP, F1) och inferensbegränsningar (ms per bildruta, joule per bildruta, minne) tillsammans. Denna balanserade optimering är det som gör en modell verkligt driftsättningsklar för UAV-användning.
Utbildning och utvärdering i realistiska jordbruksmiljöer
För att de detektorer som hittats av NAS ska fungera bra måste de tränas och testas på realistiska jordbruksdata. Det innebär att man använder datamängder som fångar variationen hos verkliga fält: olika grödarter, tillväxtstadier, årstider, ljusförhållanden och höjder över havet. Till exempel kanske träning på bilder av endast unga majsskott inte generaliseras till mogna vetehuvuden. Fältrepresentativa datamängder säkerställer att modellen lär sig funktioner som är viktiga på gården. Dataförstärkning (slumpmässiga grödor, ljusstyrkeförändringar, rörelseoskärpa) kan också tillämpas under träning för att efterlikna drönarrörelser och belysning.

Vid utvärdering är det viktigt att testa modellen under så verkliga förhållanden som möjligt. Simuleringsverktyg kan hjälpa (t.ex. att flyga virtuell drönare över 3D-fält) men verkliga flygtester är guldstandarden. Benchmarking ombord utförs genom att köra modellen på den faktiska drönarhårdvaran. Efter NAS driftsatte de kandidaten på en Jetson Nano och mätte 28.1% snabbare inferens (jämfört med baslinjens YOLOv8n) och bättre energianvändning. Denna typ av feedback från verkliga enheter bekräftar att sökningen producerade en modell som verkligen uppfyller kraven.
Generalisering är också avgörande. En modell kan sökas igenom och tränas på en gröda (t.ex. vete), men jordbrukare behöver detektorer som fungerar över flera fält. Studien visade stark generalisering mellan grödor: den NAS-deriverade detektorn som tränats på en uppgift presterade fortfarande bra på en annan gröddatauppsättning (bomullsplantor) utan omträning. Detta tyder på att implementeringsmedvetna NAS kan ge robusta arkitekturer. Domänförskjutningar (t.ex. flytt från majsfält till fruktträdgårdar) kan dock fortfarande kräva finjustering eller ytterligare sökning. Testning över flera säsonger (sommar- kontra höstbilder) rekommenderas också.
Slutligen bör varje ny modell testas på drönarplattformen före driftsättning. Detta inkluderar att logga dess noggrannhet och hastighet på drönare, säkerställa att hårdvaran inte överhettas och verifiera strömförbrukningen. Först då kan jordbrukare lita på den för verksamhetskritisk övervakning. Genom att kombinera fältrelevant utbildning och rigorös hårdvaruutvärdering ger driftsättningsmedvetna NAS detektorer som inte bara är teoretiskt effektiva, utan också bevisade i fält.
Fördelar jämfört med manuellt konstruerade UAV-detektorer
Driftsättningsmedvetna NAS erbjuder flera tydliga fördelar jämfört med traditionella, manuellt utformade modeller för drönare:
1. Avvägningar för bättre prestanda: De modeller som hittats i NAS tenderar att ge högre kombinationer av noggrannhet, hastighet och energieffektivitet. Till exempel körde den bästa modellen 28% snabbare och använde 18,5% mindre energi på Jetson Nano än den manuellt valda YOLOv8n-baslinjen, samtidigt som den bara förlorade ~2% i detektions-mAP. Att uppnå en sådan balans manuellt skulle vara mycket svårt.
2. Förbättrad generalisering: Modeller som upptäcks av NAS kan vara mer anpassningsbara till nya förhållanden, eftersom sökningen kan innehålla olika data eller mål. Den automatiskt utformade detektorn generaliserade väl över olika grödtyper (vete och bomull) och ljusförhållanden. Denna breda robusthet är avgörande när flygningar stöter på oväntade scener.
3. Minskad teknisk insats: NAS automatiserar mycket trial-and-error. Istället för att manuellt justera lagerstorlekar och testa många kandidater, utforskar en driftsättningsmedveten NAS iterativt alternativ och hittar den bästa designen för dig. Detta sparar utvecklingstid och expertis, vilket gör det enklare att uppdatera detektorer för nya uppgifter eller hårdvara.
4. Skalbarhet: När NAS-ramverket väl är konfigurerat kan det användas för olika UAV-plattformar eller uppdrag. Till exempel kan samma driftsättningsmedvetna NAS söka efter en detektor som är inställd på en annan kameraupplösning eller drönarmodell genom att helt enkelt ändra begränsningsingångarna. Detta är mycket mer skalbart än att omdesigna nätverk från grunden för varje scenario.
Utmaningar och begränsningar
En driftsättningsmedveten NAS är kraftfull men inte en mirakelkur. Den måste tillämpas medvetet, med medvetenhet om sina resurskrav och variationen i målmiljön. Trots sitt löfte har en driftsättningsmedveten NAS utmaningar:
1. Hög sökkostnad: NAS kan kräva omfattande beräkningar. Även med effektiva algoritmer kan det ta många GPU-timmar (eller specialiserad beräkning) att söka i arkitekturutrymme. Om det inte hanteras noggrant kan sökkostnaden vara oöverkomlig för vissa team.
2. Databias och domänskifte: NAS-systemet är bara så bra som de data som används. Om träningsbilderna inte är representativa för fältförhållandena kan den funna arkitekturen underprestera i verkligheten. Till exempel kanske en modell som är inställd på en grödtyp eller ett geografiskt område inte överförs perfekt till en annan utan ytterligare anpassning.
3. Hårdvaruheterogenitet: UAV-hårdvara finns i många varianter (olika inbyggda GPU:er, processorer, FPGA:er). En modell som är optimerad för ett kort kanske inte är optimal på ett annat. En driftsättningsmedveten NAS måste antingen köra om sökningar för varje plattform eller använda konservativa begränsningar som passar alla – vilket kan begränsa prestandan.
4. Praktiska begränsningar: Verkliga jordbruksinstallationer involverar problem som nätverksuppdateringar trådlöst, systemintegration med flygkontroll och säkerhetscertifiering. Även den bästa NAS-modellen måste integreras i ett komplett drönarsystem. Att koordinera modelluppdateringar, myndighetsgodkännanden och utbildning av lantbrukare är icke-tekniska hinder.
Framtida riktningar
Framtiden kommer sannolikt att innebära en ännu tätare integration av modelldesign, sensorteknik och UAV-kontroll. Implementeringsmedvetna NAS kommer att förbli ett viktigt verktyg i denna samdesignprocess. Framöver dyker flera spännande vägar upp:
1. Online- och adaptiv NAS: Istället för en engångssökning offline kan framtida system justera nätverket i realtid eller mellan flygningar. Till exempel kan en drönare börja med en basmodell och, med hjälp av lätta NAS-algoritmer, justera sig själv för att hantera nya ljus- eller terrängförhållanden under färd. Denna "NAS på enheten" är mycket utmanande men skulle kunna förbättra anpassningsförmågan avsevärt.
2. Samdesign av sensorer och modeller: Framtida precisionsjordbrukssystem skulle gemensamt kunna optimera valet av kamera (RGB, multispektral, infraröd) och det neurala nätverket. En driftsättningsmedveten NAS skulle kunna utökas till att inkludera sensorparametrar (som använda spektralband) i sin sökning och hitta den bästa kombinationen av hårdvara och modell.
3. Multispektral/hyperspektral integration: Som studien om bomullssjukdomen antyder kan integrering av multispektrala bilder förbättra upptäckten, särskilt av problem i tidiga skeden. Framtida NAS skulle kunna utforska multiströmsmodeller som kombinerar RGB- och nära-infraröda kanaler för att upptäcka subtila förändringar i växter mer tillförlitligt.
4. Autonoma beslutsrör: I slutändan kan NAS-optimerade detektorer ge fullständig autonomi. Till exempel kan en drönare automatiskt generera en sprutplan eller varna gårdschefer om den upptäcker vissa förhållanden. En driftsättningsmedveten NAS skulle kunna utökas till heltäckande pipelines (detekterings- och åtgärdsmodeller), vilket optimerar hela systemet.
5. Etiska och miljömässiga överväganden: I takt med att drönare blir mer kapabla måste vi beakta integritet, luftrumssäkerhet och påverkan på jordbruksarbete (som Agrawal och Arafat noterat). Att säkerställa att NAS-optimerade drönare används ansvarsfullt inom jordbruket är ett viktigt framtida mål.
Slutsats
En driftsättningsmedveten NAS representerar en kraftfull metod för att skräddarsy lättviktsdetektorer för UAV-baserad grödövervakning. Genom att bädda in UAV-hårdvara och uppdragsbegränsningar i sökningen produceras modeller som sparar beräkningar och energi utan att offra mycket noggrannhet. Till exempel visade nyligen genomfört arbete att en NAS-designad detektor använde 37% färre FLOP:er och 61% färre parametrar än referensen YOLOv8n, men dess mAP minskade med bara ~2%.
På faktisk drönarhårdvara innebar detta snabbare inferens och bättre energieffektivitet. Sådana vinster leder till längre flygtider, snabbare analys och mer responsivt jordbruksstöd. Jämfört med manuellt utformade modeller ger driftsättningsmedvetna NAS bättre prestandageneralisering, mindre manuell justeringsansträngning och skalbarhet till nya UAV-plattformar.
I samband med precisionsjordbruk kan dessa förbättringar göra drönare för grödövervakning mer praktisk och effektiv. Drönare utrustade med NAS-optimerade detektorer kan mer tillförlitligt upptäcka ogräs, skadedjur eller stress, vilket möjliggör snabba insatser som sparar resurser och ökar avkastningen. I takt med att jordbruket fortsätter att använda drönare och AI kommer driftsättningsmedvetna NAS att spela en central roll för att säkerställa att modellerna som körs på dessa drönare är effektiva, exakta och fältklara. Det överbryggar klyftan mellan banbrytande forskning om neurala nätverk och jordbrukarnas praktiska behov, vilket bidrar till att driva framtiden för datadrivet precisionsjordbruk.