Bespilotne letjelice (UAV) ili dronovi transformiraju modernu poljoprivredu pružajući brze zračne snimke polja. Koriste se za skeniranje usjeva radi utvrđivanja zdravlja, faze rasta, štetnika, korova i procjene prinosa. Na primjer, Kina sada ima preko 250 000 poljoprivrednih dronova u pogonu, a u Tajlandu je do 2023. godine oko 30% poljoprivrednog zemljišta pokriveno prskanjem ili praćenjem dronovima. Ove bespilotne letjelice čine poljoprivredu učinkovitijom brzim otkrivanjem problema (poput pojave štetnika ili nedostatka vode) koji se mogu propustiti na terenu.
Međutim, male bespilotne letjelice imaju vrlo ograničenu računalnu snagu na vozilu i vijek trajanja baterije. Stoga je pokretanje složenih algoritama umjetne inteligencije na njima u stvarnom vremenu izazov. Tradicionalni lagani modeli detekcije objekata (poput sićušnih detektora temeljenih na YOLO-u ili MobileNetu) mogu samo djelomično zadovoljiti te potrebe: često žrtvuju točnost ili brzinu i zahtijevaju značajno ručno podešavanje. Ovaj nedostatak motivira Neural Architecture Search (NAS) koji je svjestan implementacije: automatiziranu metodu dizajna koja prilagođava modele dubokog učenja točnim zahtjevima bespilotnih letjelica raspoređenih na terenu.
Moderna precizna poljoprivreda koristi bespilotne letjelice (dronove) za snimanje polja i praćenje stanja usjeva. Leteći iznad velikih površina, dronovi mogu prikupljati slike visoke rezolucije biljaka, tla i uzoraka polja. Ove slike se šalju algoritmima računalnog vida koji otkrivaju korov među usjevima, procjenjuju prinos (npr. brojanje plodova ili glavica) ili uočavaju rane znakove bolesti ili nedostatka hranjivih tvari. Na primjer, dronovi omogućuju ciljano prskanje herbicida na korov, smanjujući upotrebu kemikalija i troškove.
Međutim, mala računala u dronovima (često ograničena na nekoliko vata snage) teško pokreću velike neuronske mreže brzinom leta. To otežava analizu u stvarnom vremenu: ako dron uoči problem, mora brzo reagirati ili zabilježiti podatke prije nego što se baterija isprazni. Trenutni lagani detektori (npr. YOLOv8 nano, YOLO-tiny, MobileNets) dizajniraju se ručno i često uključuju kompromise: smanjenje modela ubrzava ga, ali može naštetiti točnosti.
Kao rezultat toga, postoji snažna potreba za metodama koje automatski pronalaze najbolji mogući model s obzirom na ograničenja bespilotne letjelice. NAS sustavi koji su svjesni implementacije zadovoljavaju ovu potrebu pretraživanjem arhitektura neuronskih mreža koje zajednički optimiziraju točnost detekcije i korištenje resursa (latencija, snaga, memorija) u stvarnim uvjetima bespilotne letjelice. Ovaj pristup može pružiti specijalizirane modele koji učinkovito rade na hardveru drona, a istovremeno ostaju vrlo točni za zadatke praćenja usjeva.
Zahtjevi za detekciju objekata bespilotnim letjelicama u praćenju usjeva
Poljoprivredne bespilotne letjelice obavljaju niz zadataka vizualne detekcije, svaki sa svojim zahtjevima:
1. Zdravlje usjeva i otkrivanje stresa: Dronovi koriste RGB, termalne ili multispektralne kamere za identifikaciju biljaka pod stresom, nedostatka hranjivih tvari ili simptoma bolesti. Algoritmi u stvarnom vremenu mogu mapirati varijabilnost polja, usmjeravati navodnjavanje ili gnojidbu. Točno otkrivanje znakova stresa biljaka omogućuje pravovremene intervencije za očuvanje prinosa.
2. Identifikacija korova: Otkrivanje korova među usjevima omogućuje poljoprivrednicima prskanje samo neželjenih biljaka, čime se štedi herbicid. Na primjer, studija na poljima pamuka koristila je snimke bespilotne letjelice s detektorom temeljenim na YOLOv7 i postigla je točnost od oko 83% u odvajanju korova od pamuka. Ipak, razlikovanje vizualno sličnih korova i usjeva ostaje teško na pretrpanim slikama polja.

3. Otkrivanje štetočina i bolesti: Bespilotne letjelice mogu uočiti pojave (npr. skakavce, insekte ili gljivičnu palež) ranije od ljudi koji pješice hodaju. Dronovi također podržavaju mapiranje zona zaraženih štetočinama putem multispektralnog snimanja, što poboljšava samo RGB. Brzo i točno otkrivanje štetočina ključno je za sprječavanje širenja.
4. Procjena prinosa: Brojanje plodova, glavica žitarica ili biljaka iz zraka pomaže u predviđanju količine žetve. Modeli obučeni za otkrivanje jabuka, dinja ili glavica pšenice na snimkama bespilotnih letjelica mogu ubrzati procjenu prinosa. Na primjer, neuronske mreže na snimkama dronova korištene su za brojanje usjeva lubenica i dinja na poljima.
5. Geodetsko snimanje i kartiranje: Dronovi također stvaraju karte polja (topografija, razlike u tlu) koje pomažu u planiranju obrađivanja. Iako se ne radi strogo o detekciji objekata, ovo je dio praćenja bespilotnim letjelicama.
Ovi zadaci često zahtijevaju zaključivanje u gotovo stvarnom vremenu: dron koji leti iznad polja možda će morati obrađivati video snimke u hodu (nekoliko sličica u sekundi) kako bi se kontrolne odluke (poput podešavanja visine ili aktiviranja prskalice) mogle donijeti odmah. U drugim slučajevima, mala kašnjenja (sekunde) mogu biti prihvatljiva ako se podaci bilježe i analiziraju nakon slijetanja.
Važno je napomenuti da vid bespilotne letjelice mora podnijeti promjene u okolišu: jaku sunčevu svjetlost, sjene, zamućenje kretanja uzrokovano vjetrom, zaklanjanje preklapajućim lišćem ili promjene nadmorske visine i kuta. Veličine objekata variraju (krupni plan korova u odnosu na udaljene skupine štetočina), pa detektori moraju upravljati značajkama više razmjera.
Konačno, misije poljoprivrednih bespilotnih letjelica uključuju stroge kompromise između točnosti, latencije i energije. Visoka točnost detekcije potrebna je kako bi se izbjeglo propuštanje korova ili štetnika, ali pokretanje vrlo duboke mreže može brzo isprazniti bateriju. Model detekcije stoga mora biti brz i energetski učinkovit, a istovremeno dovoljno točan za zadatak. Ovi strogi zahtjevi ističu zašto je za bespilotne letjelice u poljoprivredi potreban specijalizirani dizajn modela.
Lagani detektori objekata za platforme bespilotnih letjelica
Lagani detektori objekata su neuronske mreže posebno dizajnirane za rad na ograničenom hardveru. Često koriste male okosnice (poput MobileNeta ili ShuffleNeta), smanjene širine slojeva ili pojednostavljene dizajne vrata/glave. Na primjer, modeli obitelji YOLO uključuju "nano" i "tiny" verzije (npr. YOLOv8n, YOLOv5s) koje imaju manje parametara i zahtijevaju manje operacija (FLOP-ova).
Takvi detektori mogu raditi brzinom od nekoliko desetaka sličica u sekundi na ugrađenom hardveru poput NVIDIA Jetson Nano ili Google Coral. Na primjer, Ag-YOLO bio je prilagođeni detektor temeljen na YOLO-u za plantaže palmi koji je radio brzinom od 36,5 fps na Intel Neural Compute Stick 2 (koristeći samo 1,5 W) i postigao visoku točnost (F1 = 0,9205). Ovaj model koristio je oko 12× manje parametara od YOLOv3-Tinyja, a istovremeno je udvostručio svoju brzinu.

Ovi primjeri pokazuju kompromise u dizajnu modela: smanjenje veličine ili složenosti modela (npr. manji broj slojeva ili kanala) obično ubrzava zaključivanje i smanjuje potrošnju energije, ali može smanjiti točnost. Ag-YOLO je žrtvovao dio kapaciteta kako bi dobio na brzini i učinkovitosti, ali je i dalje zadržao visok F1 rezultat od 0,92 na svom zadatku.
Slično tome, tri varijante YOLOv7 uspoređene su za detekciju korova: puni YOLOv7 postigao je točnost od 83%, dok je manja YOLOv7-w6 mreža pala na točnost od 63%. To ilustrira ograničenje generičkih laganih detektora: modeli podešeni za jedno okruženje ili vrstu objekta mogu biti lošiji u drugom. Detektor smanjen zbog brzine mogao bi propustiti suptilne znakove (npr. mali ili kamuflirani korov), što bi umanjilo robusnost u različitim uvjetima.
U poljoprivredi, ove generičke lagane mreže možda neće biti optimalne bez daljnjeg prilagođavanja. Na primjer, YOLOv7 model prethodno obučen na uobičajenim skupovima podataka možda neće savršeno obraditi jedinstvene teksture i mjerila slika usjeva. Stoga postoji potreba za optimizacijom arhitekture modela specifičnom za zadatak i platformu. Ručno podešavanje (promjena slojeva, filtera itd.) za svaku novu vrstu drona ili sortu usjeva je radno intenzivno. To potiče automatizirane metode - poput NAS-a koji je svjestan implementacije - da pronađu najbolju ravnotežu veličine, točnosti i robusnosti za danu platformu bespilotne letjelice i poljoprivrednu primjenu.
Pretraga neuronske arhitekture u sustavima vida temeljenim na bespilotnim letjelicama
Pretraga neuronske arhitekture (NAS) je automatizirana metoda za dizajniranje arhitektura neuronskih mreža. Umjesto ručnog postavljanja broja slojeva, filtera i veza, NAS koristi algoritme (učenje s pojačanjem, evolucijske metode ili pretraživanje temeljeno na gradijentu) kako bi istražio prostor mogućih dizajna i pronašao one koji optimiziraju odabrani cilj (poput točnosti).
NAS je već primijenjen za stvaranje mreža prilagođenih mobilnim uređajima. Na primjer, Googleov MnasNet bio je pionirski NAS koji je "platformski svjestan" i izravno je uključivao stvarnu latenciju uređaja u cilj. MnasNet je mjerio vrijeme zaključivanja na Google Pixel telefonu za svaki model kandidata tijekom pretraživanja i uravnotežio točnost s ovom izmjerenom latencijom. Rezultat je bila obitelj CNN-ova koji su bili brzi i točni na mobilnom hardveru, nadmašujući ručno dizajnirane MobileNetove i NASNet modele na ImageNetu.
Međutim, generički NAS pristupi poput MnasNeta usredotočuju se na opće zadatke vida (klasifikacija ImageNeta ili detekcija COCO-a) i opći hardver (npr. mobilne telefone). Za praćenje usjeva bespilotnom letjelicom problem je specijaliziraniji. Želimo detektore optimizirane za specifične klase objekata (biljke, korov, štetočine) i prilagođene senzorima i profilu leta bespilotne letjelice. Standardni NAS koji optimizira samo točnost ili generičku latenciju može previdjeti nijanse poput detekcije malih objekata ili energetskih ograničenja.
Također, tradicionalne NAS metode mogu biti računalno vrlo skupe (često zahtijevaju dane na velikim GPU klasterima), što nije uvijek praktično za poljoprivredne istraživače. Stoga su za bespilotnu viziju potrebni NAS okviri specifični za zadatke. Oni moraju uključivati kriterije relevantne za bespilotne letjelice i biti što učinkovitiji.
U svim slučajevima, svijest o ograničenjima je ključna: NAS mora biti svjestan ograničenja ciljnog uređaja (slično MnasNetu) i zahtjeva bespilotne letjelice u stvarnom vremenu tijekom leta. Ako je pretraživanje previše sporo ili zanemaruje potrošnju energije, rezultirajući model možda neće dobro funkcionirati na terenu.
U praksi, NAS za bespilotnu letjelicu (UAV) bi izravno uključivao latenciju hardvera i energiju u metriku pretraživanja. Na primjer, moglo bi se izmjeriti broj sličica u sekundi (frame rate) detektora kandidata na stvarnom računalu drona (poput NVIDIA Jetsona) i to koristiti kao rezultat. To je u suprotnosti s korištenjem jednostavnih proxyja poput FLOP-ova, koji ne bilježe brzinu u stvarnom svijetu.
Na taj način, NAS može otkriti arhitekture koje najbolje iskorištavaju mogućnosti uređaja. Ukratko, NAS nudi način automatskog dizajniranja detektora za bespilotne letjelice, ali se mora prilagoditi kako bi se uzeli u obzir zadaci specifični za bespilotne letjelice i zahtjevi za učinkovitošću.
NAS svjestan implementacije: Osnovna načela
NAS koji je svjestan implementacije proširuje NAS koji je svjestan hardvera uključivanjem konteksta implementacije i ograničenja okoline u proces dizajna. Drugim riječima, ne uzima u obzir samo hardver drona (brzinu CPU-a/GPU-a, ograničenja memorije, energetski budžet) već i ono s čime će se bespilotna letjelica zapravo susresti na terenu. To znači eksplicitnu optimizaciju za metrike poput latencije zaključivanja na ciljnom uređaju, potrošnje energije i memorijskog otiska, a sve to uz istovremeno traženje visoke točnosti detekcije.
Na primjer, tijekom NAS-a moglo bi se svaki kandidatski model postaviti na Jetson Nano pričvršćen na bespilotnu letjelicu i zabilježiti njegovo stvarno vrijeme zaključivanja i potrošnju energije. Ove empirijske povratne informacije pomažu u usmjeravanju potrage za modelima koji zaista zadovoljavaju kriterije postavljanja.
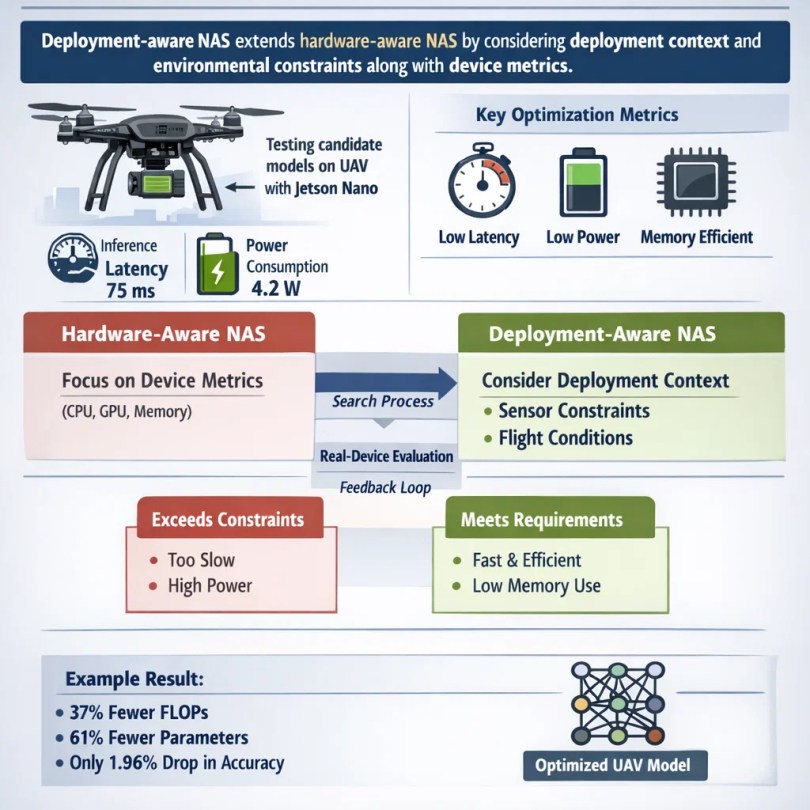
NAS koji je svjestan hardvera (poput MnasNeta) fokusira se na metriku uređaja, dok NAS koji je svjestan implementacije ide dalje: može uzeti u obzir ulazne karakteristike senzora (npr. razlučivost slike, multispektralne kanale) i ciljeve latencije aplikacije (potreban broj sličica u sekundi). Može čak uključiti ograničenja leta poput maksimalno dopuštene memorije ili uključiti evaluacije pod simuliranim podrhtavanjem vjetra ili zamućenjem pokreta.
NAS koji je svjestan implementacije mogao bi kažnjavati arhitekture koje prelaze, recimo, 5W potrošnje energije ili kojima je potrebno više memorije nego što dron ima. Time se pretraga prirodno usmjerava prema praktičnim modelima za terenski rad bespilotne letjelice. U biti, NAS koji je svjestan implementacije radi na zatvaranju petlje između dizajna modela i upotrebe u stvarnom svijetu. Umjesto odabira arhitekture izolirano i nadanja da će raditi, sustavno uključuje testiranje na stvarnom uređaju tijekom pretrage.
Na primjer, Kerec i suradnici (2026.) koristili su takav okvir za traženje detektora bespilotnih letjelica: nadogradili su YOLOv8n bazu, ali su u pretragu uključili latenciju i energiju Jetson Nanoa. Rezultirajući model imao je 37% manje GFLOP-ova i 61% manje parametara od YOLOv8n, s padom mAP-a od samo 1,96%. To jasno pokazuje kako su ograničenja implementacije usmjerila NAS prema puno lakšoj i bržoj mreži.
Uloga NAS-a koji je svjestan implementacije u praćenju precizne poljoprivrede
NAS koji je svjestan implementacije može uvelike poboljšati praćenje usjeva bespilotnim letjelicama prilagođavanjem detektora poljoprivrednim uvjetima. Na primjer, pretraga može favorizirati arhitekture koje se ističu u otkrivanju malih, tankih objekata (poput uskog korova ili tankih sadnica kukuruza) ili u razlikovanju biljaka od pozadine tla. Može prilagoditi dubinu mreže i receptivna polja tipičnoj visini leta: na maloj nadmorskoj visini objekti ispunjavaju sliku i mogu zahtijevati fine detalje, dok bi na većoj nadmorskoj visini mreža trebala biti dobra u detekciji malih razmjera. NAS koji je svjestan implementacije može kodirati te zahtjeve u svoj prostor pretraživanja.
Brzina je ključna na terenu. Zamislite da dron otkrije pojavu štetočina; ako je model dovoljno brz da obradi video pri, recimo, 30 fps, može upozoriti pilota ili pokrenuti trenutnu akciju tretiranja. U testovima, model dizajniran od strane NAS-a radio je 28% brže na Jetson Nano nego standardni YOLOv8n, zahvaljujući optimiziranoj arhitekturi. Također je koristio 18.5% manje energije tijekom ONNX rada, što znači da dron može letjeti dulje s istom baterijom. Ovi dobici čine donošenje odluka tijekom leta izvedivijim i produžuju trajanje misije.
Robusnost je još jedna prednost. Budući da NAS koji je svjestan implementacije uključuje stvarnu evaluaciju uređaja, pretraživanje može uključivati testove u različitim uvjetima. Na primjer, može simulirati slabo osvjetljenje ili uključivati slike za učenje iz zore i sumraka, osiguravajući da konačni detektor održava točnost u stvarnim vremenskim uvjetima i promjenama osvjetljenja. Rad je pokazao da detektor izveden iz NAS-a dobro generalizira: testirali su ga na dva različita skupa podataka o usjevima (glave pšenice i sadnice pamuka) i pronašli snažne performanse u oba.

To sugerira da je NAS svjestan implementacije pomogao u pronalaženju zajedničkih, korisnih značajki za poljoprivredu, poboljšavajući generalizaciju na nova polja. Sveukupno, NAS svjestan implementacije pomaže uravnotežiti točnost s duljim vremenom leta. Smanjenjem računanja, dronovi troše manje energije i mogu pokriti veću površinu s jednim punjenjem baterije, a istovremeno pouzdano otkrivaju usjeve i štetnike.
Dizajn prostora za pretraživanje za poljoprivredne detektore bespilotnih letjelica
Važan dio NAS-a koji je svjestan implementacije je prostor pretraživanja – skup mogućih mrežnih dizajna koje razmatra. Za detektore usjeva bespilotnih letjelica, prostor pretraživanja može se izraditi tako da uključuje obećavajuće arhitekture za ovu domenu. Ključni dijelovi uključuju:
1. Dizajn okosnice: Okosnica je ekstraktor značajki. Za bespilotne letjelice mogu se uključiti lagani konvolucijski građevni blokovi kao što su konvolucije odvojive po dubini (kao što se koristi u MobileNetu) ili invertirani rezidualni blokovi. Invertirani reziduali i linearna uska grla (stil MobileNetV2) dobro su poznati po mobilnoj učinkovitosti. Prostor pretraživanja mogao bi omogućiti promjenu širine (broja kanala) i dubine svakog bloka kako bi odgovarao računalnom proračunu bespilotne letjelice. Moduli za pažnju ili transformatorski inspirirani moduli također bi se mogli uključiti ako si ih bespilotna letjelica može priuštiti pri maloj snazi.
2. Dizajn vrata: Mnogi detektori objekata koriste piramide značajki (FPN) ili mreže agregacije putova za kombiniranje višeskalnih značajki. Pretraga bi mogla istražiti pojednostavljene FPN-ove ili laganu agregaciju značajki. Na primjer, korištenje glave jedne skale u odnosu na glave više skala mogle bi biti opcije. Prostor bi mogao omogućiti objedinjavanje slojeva ili preskakanje veza koje pomažu u otkrivanju objekata različitih veličina.
3. Dizajn glave: Glava za detekciju (klasifikacijski i box regresijski slojevi) također se može mijenjati. Za bespilotne letjelice koje pretražuju ujednačena polja, jednostavnija glava bi mogla biti dovoljna. Ali za hvatanje malih neravnina, pretraga može uključivati dodatne konvolucijske slojeve ili različite sheme sidrenja.
4. Lagane operacije: Prostor pretraživanja može eksplicitno dopustiti samo jeftine operacije. Na primjer, odabir između 3×3 konverzije i jeftinije 1×3+3×1 faktorizirane konverzije ili uključivanje GhostNet modula. Također može dopustiti male veličine jezgre ili smanjene dimenzije kako bi se ograničilo računanje. Svi ovi izbori ovise o hardveru. Prostor može zabraniti bilo koju konfiguraciju sloja koja premašuje ograničenje memorije drona ili očekivani energetski prag.
Pažljivim dizajniranjem ovog prostora pretraživanja, NAS proces je vođen prema učinkovitim, ali efikasnim arhitekturama. Rezultat bi mogla biti nova kombinacija blokova koji nisu uzeti u obzir u standardnim modelima. Najbolje pronađeni detektor koristio je prilagođene izbore blokova koji su smanjili GFLOP-ove za 37% i parametre za 61% u usporedbi s YOLOv8n.
To je bilo moguće jer je NAS mogao kombinirati i usklađivati elemente glavnog i glavnog sustava pod ograničenjima bespilotne letjelice. Ukratko, prostor pretraživanja za poljoprivredne detektore bespilotnih letjelica usredotočen je na skalabilne, lagane građevne blokove i rukovanje više skala, sve unutar ograničenja ugrađenog hardvera.
Ciljevi i ograničenja optimizacije
NAS koji je svjestan implementacije mora žonglirati s više ciljeva. Primarni cilj je obično točnost detekcije (npr. srednja prosječna preciznost, mAP), mjerena na skupovima podataka za praćenje usjeva. Na primjer, mAP@50 (točnost na 50% IOU) je uobičajena metrika. Model optimiziran za NAS imao je pad mAP@50 od samo 1,96% u usporedbi s osnovnim YOLOv8n, što je vrlo mali gubitak za postignute dobitke. Preciznost i prisjećanje (ili F1 rezultat) na ključnim klasama (korov, usjevi) također se uzimaju u obzir.
Istovremeno, latencija i energija moraju biti optimizirane. Latencija je vrijeme zaključivanja po slici; za ugrađeni GPU može biti 20-50 ms ili više. Manja latencija znači veću brzinu kadrova. Potrošnja energije (džuli po kadru) ključna je za izdržljivost leta. Memorijski otisak (broj parametara, veličina modela) još je jedno ograničenje; modeli moraju stati u RAM memoriju uređaja. Stoga NAS obično postavlja cilj ili kaznu za ta ograničenja.
Na primjer, svaki model sporiji od određenog praga ili iznad proračuna parametara mogao bi biti snižen u rangu. To učinkovito pretvara NAS u problem optimizacije s više ciljeva: maksimizirati točnost uz minimiziranje latencije, energije i veličine.
Praktično, to bi se moglo učiniti ponderiranim zbrojem ciljeva ili tvrdim ograničenjima. Neke metode daju veliku kaznu svakom kandidatu koji premašuje ograničenje snage bespilotne letjelice. Druge eksplicitno izračunavaju energetsku metriku: modeli su testirani pod ONNX runtimeom kako bi se izmjerila “energetska učinkovitost”, a najbolji model bio je +18.5% energetski učinkovitiji od YOLOv8n. To je bio jedan od ciljeva koji su vodili njihovu pretragu.
Pronađeni kompromisi mogu se vizualizirati na Pareto granici: na jednom kraju, izuzetno brzi mali modeli s nižom točnošću; na drugom kraju, veliki i točni modeli koji su prespori ili troše puno energije za dron. NAS koji je svjestan implementacije ima za cilj pronaći idealnu točku na ovoj granici koja odgovara stvarnim prioritetima misije (npr. mali gubitak točnosti za veliko ubrzanje). Ukratko, NAS mora zajedno uzeti u obzir metrike točnosti (mAP, F1) i ograničenja zaključivanja (ms po okviru, džuli po okviru, memorija). Ova uravnotežena optimizacija čini model doista spremnim za implementaciju za korištenje bespilotne letjelice.
Obuka i evaluacija u realnim poljoprivrednim uvjetima
Da bi detektori pronađeni u NAS-u dobro funkcionirali, moraju se obučiti i testirati na realističnim poljoprivrednim podacima. To znači korištenje skupova podataka koji obuhvaćaju varijabilnost stvarnih polja: različite vrste usjeva, faze rasta, godišnja doba, uvjete osvjetljenja i nadmorske visine. Na primjer, obuka na slikama samo mladih izdanaka kukuruza možda se neće generalizirati na zrele glavice pšenice. Skupovi podataka reprezentativni za polje osiguravaju da model uči značajke koje su važne na farmi. Proširenje podataka (slučajni usjevi, promjene svjetline, zamućenje pokreta) također se može primijeniti tijekom obuke kako bi se oponašalo kretanje i osvjetljenje drona.

Prilikom evaluacije važno je testirati model u što realnijim uvjetima. Simulacijski alati mogu pomoći (npr. letenje virtualnim dronom preko 3D polja), ali stvarni letni testovi su zlatni standard. Ugrađeno mjerenje performansi provodi se pokretanjem modela na stvarnom hardveru bespilotne letjelice. Nakon NAS-a, kandidata su postavili na Jetson Nano i izmjerili 28.1% brže zaključivanje (u usporedbi s osnovnim YOLOv8n) i bolju potrošnju energije. Ova vrsta povratnih informacija sa stvarnog uređaja potvrđuje da je pretraga proizvela model koji zaista zadovoljava zahtjeve.
Generalizacija je također ključna. Model se može pretraživati i trenirati na jednoj usjevu (recimo, pšenici), ali poljoprivrednicima su potrebni detektori koji rade na više polja. Studija je pokazala snažnu generalizaciju na više usjeva: detektor izveden iz NAS-a, treniran na jednom zadatku, i dalje je dobro funkcionirao na drugom skupu podataka o usjevima (sadnice pamuka) bez ponovnog treniranja. To sugerira da NAS koji je svjestan implementacije može dati robusne arhitekture. Međutim, promjene domene (npr. prelazak s kukuruzišta na voćnjake) i dalje mogu zahtijevati fino podešavanje ili daljnje pretraživanje. Preporučuje se i testiranje kroz godišnja doba (ljetne vs. jesenske snimke).
Konačno, svaki novi model treba testirati na platformi bespilotne letjelice prije implementacije. To uključuje bilježenje njegove točnosti i brzine na dronovima, osiguravanje da se hardver ne pregrije i provjeru potrošnje energije. Tek tada mu poljoprivrednici mogu vjerovati za kritično praćenje. Kombiniranjem obuke relevantne za teren i rigorozne evaluacije hardvera, NAS koji je svjestan implementacije daje detektore koji su ne samo teoretski učinkoviti, već i dokazani na terenu.
Prednosti u odnosu na ručno dizajnirane detektore bespilotnih letjelica
NAS sustavi osviješteni o implementaciji nude nekoliko jasnih prednosti u odnosu na tradicionalne, ručno dizajnirane modele za bespilotne letjelice:
1. Kompromisi za bolje performanse: Modeli pronađeni na NAS-u obično pružaju veće kombinacije točnosti, brzine i energetske učinkovitosti. Na primjer, najbolji model je radio 28% brže i koristio 18.5% manje energije na Jetson Nano-u nego ručno odabrana osnovna linija YOLOv8n, dok je gubio samo ~2% u detekcijskom mAP-u. Postizanje takve ravnoteže ručno bilo bi vrlo teško.
2. Poboljšana generalizacija: Modeli koje je otkrio NAS mogu se bolje prilagoditi novim uvjetima, budući da pretraga može uključivati raznolike podatke ili ciljeve. Automatski dizajnirani detektor dobro je generalizirao na različite vrste usjeva (pšenica i pamuk) i uvjete osvjetljenja. Ova široka robusnost ključna je kada se letovi susretnu s neočekivanim scenama.
3. Smanjeni inženjerski napori: NAS automatizira mnogo pokušaja i pogrešaka. Umjesto ručnog podešavanja veličina slojeva i testiranja mnogih kandidata, NAS koji je svjestan implementacije iterativno istražuje mogućnosti i pronalazi najbolji dizajn za vas. To štedi vrijeme razvoja i stručnost, olakšavajući ažuriranje detektora za nove zadatke ili hardver.
4. Skalabilnost: Nakon postavljanja, NAS okvir može se koristiti za različite platforme ili misije bespilotnih letjelica. Na primjer, isti NAS koji je svjestan implementacije mogao bi tražiti detektor podešen na drugačiju rezoluciju kamere ili model drona jednostavnom promjenom ulaznih ograničenja. To je puno skalabilnije od redizajniranja mreža od nule za svaki scenarij.
Izazovi i ograničenja
NAS koji je svjestan implementacije je moćan, ali ne i čarobni štapić. Mora se primjenjivati promišljeno, uz svijest o njegovim zahtjevima za resursima i varijabilnosti ciljnog okruženja. Unatoč svom obećanju, NAS koji je svjestan implementacije ima izazove:
1. Visoki troškovi pretraživanja: NAS može zahtijevati značajna izračunavanja. Čak i s učinkovitim algoritmima, pretraživanje prostora arhitekture može potrajati mnogo sati rada GPU-a (ili specijaliziranog izračunavanja). Ako se ne upravlja pažljivo, opterećenje pretraživanja može biti previsoko za neke timove.
2. Pristranost podataka i pomak domene: NAS je dobar koliko i korišteni podaci. Ako slike za učenje nisu reprezentativne za terenske uvjete, pronađena arhitektura može u stvarnosti podbaciti. Na primjer, model podešen na jednu vrstu usjeva ili jedno geografsko područje možda se neće savršeno prenijeti na drugo bez daljnje prilagodbe.
3. Heterogenost hardvera: Hardver bespilotnih letjelica dolazi u mnogim varijantama (različiti ugrađeni GPU-ovi, CPU-ovi, FPGA-ovi). Model optimiziran za jednu ploču možda neće biti optimalan na drugoj. NAS koji je svjestan implementacije mora ili ponovno pokrenuti pretrage za svaku platformu ili koristiti konzervativna ograničenja koja odgovaraju svima - što može ograničiti performanse.
4. Praktična ograničenja: Prava implementacija u poljoprivredi uključuje probleme poput ažuriranja mreže putem zraka, integracije sustava s kontrolom leta i sigurnosne certifikacije. Čak i najbolji NAS model mora biti integriran u potpuni sustav dronova. Koordinacija ažuriranja modela, regulatorna odobrenja i obuka poljoprivrednika nisu tehničke prepreke.
Budući smjerovi
U budućnosti će vjerojatno doći do još tješnje integracije dizajna modela, tehnologije senzora i upravljanja bespilotnim letjelicama. NAS sustavi koji su svjesni implementacije ostat će ključni alat u ovom procesu zajedničkog dizajna. Gledajući unaprijed, pojavljuje se nekoliko uzbudljivih puteva:
1. Online i adaptivni NAS: Umjesto jednokratnog pretraživanja izvan mreže, budući sustavi bi mogli prilagođavati mrežu u stvarnom vremenu ili između letova. Na primjer, dron bi mogao započeti s osnovnim modelom i, koristeći lagane NAS algoritme, prilagođavati se kako bi se nosio s novim uvjetima osvjetljenja ili terena u hodu. Ovaj “NAS na uređaju” vrlo je izazovan, ali bi mogao uvelike poboljšati prilagodljivost.
2. Zajednički dizajn senzora i modela: Budući sustavi precizne poljoprivrede mogli bi zajednički optimizirati izbor kamere (RGB, multispektralna, infracrvena) i neuronske mreže. NAS sustav koji je svjestan implementacije mogao bi se proširiti i uključiti parametre senzora (poput korištenih spektralnih pojaseva) u svoju pretragu, pronalazeći najbolju kombinaciju hardvera i modela.
3. Multispektralna/hiperspektralna integracija: Kao što studija bolesti pamuka sugerira, integriranje multispektralnih snimaka može poboljšati otkrivanje, posebno problema u ranoj fazi. Budući NAS bi mogao istražiti modele više tokova koji spajaju RGB i bliske infracrvene kanale kako bi pouzdanije otkrili suptilne promjene na biljkama.
4. Autonomni procesi odlučivanja: U konačnici, detektori optimizirani za NAS mogu omogućiti potpunu autonomiju. Na primjer, dron bi mogao automatski generirati plan prskanja ili upozoriti upravitelje farmi ako otkrije određene uvjete. NAS koji je svjestan implementacije mogao bi se proširiti na cjevovode od početka do kraja (modeli detekcije + djelovanja), optimizirajući cijeli sustav.
5. Etička i ekološka razmatranja: Kako bespilotne letjelice postaju sve sposobnije, moramo uzeti u obzir privatnost, sigurnost zračnog prostora i utjecaj na poljoprivredni rad (kao što su primijetili Agrawal i Arafat). Osiguravanje odgovorne upotrebe dronova optimiziranih za NAS u poljoprivredi važan je budući cilj.
Zaključak
NAS koji je svjestan implementacije predstavlja snažan pristup prilagođavanju laganih detektora objekata za praćenje usjeva temeljeno na bespilotnim letjelicama. Ugradnjom hardvera bespilotnih letjelica i ograničenja misije u pretraživanje, stvara modele koji štede izračun i energiju bez žrtvovanja veće točnosti. Na primjer, nedavni rad pokazao je da detektor dizajniran od strane NAS-a koristi 37% manje FLOP-ova i 61% manje parametara od referentnog YOLOv8n, no njegov mAP pao je za samo ~2%.
Na stvarnoj opremi za dronove, to je značilo brže zaključivanje za 28% i bolju energetsku učinkovitost za 18%. Takvi dobici prevode se u dulje vrijeme leta, bržu analizu i responzivniju podršku poljoprivredi. U usporedbi s ručno izrađenim modelima, NAS koji je svjestan implementacije pruža bolju generalizaciju performansi, manje ručnog podešavanja i skalabilnost novim platformama bespilotnih letjelica.
U kontekstu precizne poljoprivrede, ova poboljšanja mogu učiniti praćenje usjeva bespilotnim letjelicama praktičnijim i učinkovitijim. Dronovi opremljeni detektorima optimiziranim za NAS mogu pouzdanije uočiti korov, štetnike ili stres, omogućujući pravovremene intervencije koje štede resurse i povećavaju prinose. Kako poljoprivreda nastavlja usvajati dronove i umjetnu inteligenciju, NAS koji je svjestan implementacije igrat će središnju ulogu u osiguravanju da su modeli koji se pokreću na tim dronovima učinkoviti, točni i spremni za upotrebu na terenu. Premošćuje jaz između najsuvremenijih istraživanja neuronskih mreža i praktičnih potreba poljoprivrednika, pomažući u poticanju budućnosti precizne poljoprivrede vođene podacima.