Пилотсыз ұшу аппараттары (ПҰА) немесе дрондар егістіктердің жылдам, әуеден көріністерін қамтамасыз ету арқылы заманауи ауыл шаруашылығын түбегейлі өзгертуде. Олар дақылдардың денсаулығын, өсу кезеңін, зиянкестерді, арамшөптерді және өнімділікті бағалауды тексеру үшін қолданылады. Мысалы, Қытайда қазір 250 000-нан астам ауыл шаруашылығы дрондары жұмыс істейді, ал Тайландта 2023 жылға қарай шамамен 301 ТП3 Т ауыл шаруашылығы алқабы дронмен бүрку немесе бақылау арқылы қамтылды. Бұл ПҰА жерде байқалмайтын мәселелерді (мысалы, зиянкестердің өршуі немесе су тапшылығы) тез анықтау арқылы егіншілікті тиімдірек етеді.
Дегенмен, шағын ұшқышсыз ұшу аппараттарының борттық есептеу қуаты мен батареяның қызмет ету мерзімі өте шектеулі. Сондықтан оларда нақты уақыт режимінде күрделі жасанды интеллект көру алгоритмдерін іске қосу қиындық тудырады. Дәстүрлі жеңіл нысандарды анықтау модельдері (мысалы, кішкентай YOLO немесе MobileNet негізіндегі детекторлар) бұл қажеттіліктерді тек ішінара қанағаттандыра алады: олар көбінесе дәлдіктен немесе жылдамдықтан бас тартады және қолмен баптауды айтарлықтай қажет етеді. Бұл олқылық орналастыруға бейімделген нейрондық архитектураны іздеуді (NAS) ынталандырады: терең оқыту модельдерін далалық орналастырылған ұшқышсыз ұшу аппараттарының нақты талаптарына бейімдейтін автоматтандырылған жобалау әдісі.
Қазіргі заманғы дәл ауыл шаруашылығы егістіктерді зерттеу және егістік жағдайын бақылау үшін дрондарды (ҰҰА) пайдаланады. Үлкен аумақтардың үстінен ұшу арқылы дрондар өсімдіктердің, топырақтың және егістік үлгілерінің жоғары ажыратымдылықтағы суреттерін жинай алады. Бұл суреттер дақылдар арасындағы арамшөптерді анықтайтын, өнімділікті бағалайтын (мысалы, жемістерді немесе бастарды санайтын) немесе аурудың немесе қоректік заттардың жетіспеушілігінің алғашқы белгілерін анықтайтын компьютерлік көру алгоритмдеріне беріледі. Мысалы, дрондар арамшөптерге гербицидтерді мақсатты түрде шашуға мүмкіндік береді, бұл химиялық заттарды пайдалану мен шығындарды азайтады.
Дегенмен, дрондардағы шағын борттық компьютерлер (көбінесе бірнеше ватт қуатпен шектеледі) ұшу жылдамдығында үлкен нейрондық желілерді іске қосуда қиындықтарға тап болады. Бұл нақты уақыт режимінде талдау жүргізуді қиындатады: егер дрон ақауды байқаса, батарея таусылғанға дейін тез әрекет етуі немесе деректерді тіркеуі керек. Қазіргі жеңіл детекторлар (мысалы, YOLOv8 nano, YOLO-tiny, MobileNets) қолмен жасалған және көбінесе компромисстерді қамтиды: модельді кішірейту оны жылдамдатады, бірақ дәлдікке зиян келтіруі мүмкін.
Нәтижесінде, ҰҰА шектеулерін ескере отырып, ең жақсы модельді автоматты түрде табатын әдістерге деген қажеттілік жоғары. Орналастыруға бейім NAS нақты ҰҰА жағдайларында анықтау дәлдігі мен ресурстарды пайдалануды (кідіріс, қуат, жад) бірлесіп оңтайландыратын нейрондық желі архитектураларын іздеу арқылы осы қажеттілікті қанағаттандырады. Бұл тәсіл дрон аппараттық құралдарында тиімді жұмыс істейтін, бірақ дақылдарды бақылау тапсырмалары үшін жоғары дәлдікті сақтайтын мамандандырылған модельдерді ұсына алады.
Өсімдіктерді бақылаудағы пилотсыз ұшу аппараттарының нысандарын анықтау талаптары
Ауыл шаруашылығына арналған ұшқышсыз ұшу аппараттары әртүрлі визуалды анықтау міндеттерін орындайды, олардың әрқайсысының өзіндік талаптары бар:
1. Өсімдік денсаулығы және стрессті анықтау: Дрондар күйзеліске ұшыраған өсімдіктерді, қоректік заттардың жетіспеушілігін немесе ауру белгілерін анықтау үшін RGB, жылулық немесе көп спектрлі камераларды пайдаланады. Нақты уақыт режиміндегі алгоритмдер суаруды немесе тыңайтқыштарды басқаруды басқара отырып, егістіктердің өзгергіштігін картаға түсіре алады. Өсімдіктердің күйзеліс белгілерін дәл анықтау өнімділікті сақтау үшін уақтылы араласуға мүмкіндік береді.
2. Арамшөптерді анықтау: Егін алқаптарындағы арамшөптерді анықтау фермерлерге тек қажетсіз өсімдіктерді шашуға мүмкіндік береді, бұл гербицидтерді үнемдейді. Мысалы, мақта алқаптарында жүргізілген зерттеуде YOLOv7 негізіндегі детекторы бар ұшқышсыз ұшу аппараттарының суреттері пайдаланылды және арамшөптерді мақтадан ажыратуда шамамен 83% дәлдігіне қол жеткізілді. Дегенмен, визуалды түрде ұқсас арамшөптер мен дақылдарды шатасқан далалық суреттерде ажырату қиын болып қала береді.

3. Зиянкестер мен ауруларды анықтау: Ұшқышсыз ұшу аппараттары (ҰҰА) адамдарға қарағанда індеттерді (мысалы, шегірткелер, жәндіктер немесе саңырауқұлақ ауруы) ертерек анықтай алады. Дрондар сонымен қатар зиянкестер көп таралған аймақтарды көп спектрлі бейнелеу арқылы картаға түсіруді қолдайды, бұл тек RGB көмегімен жақсарады. Таралудың алдын алу үшін зиянкестерді жылдам, дәл анықтау өте маңызды.
4. Өнімділікті бағалау: Жемістерді, дәнді дақылдардың бастарын немесе өсімдіктерді ауадан санау егін жинау көлемін болжауға көмектеседі. Ұшқышсыз ұшу аппараттарының суреттерінде алма, қауын немесе бидай бастарын анықтауға үйретілген модельдер өнімділікті бағалауды жеделдете алады. Мысалы, дрон суреттеріндегі нейрондық желілер егістіктердегі қарбыз бен қауын дақылдарын санау үшін пайдаланылды.
5. Геодезиялық түсіру және картаға түсіру: Дрондар сонымен қатар егістік жоспарлауға көмектесетін далалық карталарды (топография, топырақ айырмашылықтары) жасайды. Нысандарды анықтау қатаң түрде болмаса да, бұл ҰҰА мониторингінің бөлігі болып табылады.
Бұл тапсырмалар көбінесе нақты уақыт режимінде қорытынды жасауды талап етеді: егістіктердің үстінен ұшатын дрон бейне кадрларды ұшу кезінде (секундына бірнеше кадр) өңдеуі қажет болуы мүмкін, осылайша басқару шешімдері (биіктікті реттеу немесе бүріккішті іске қосу сияқты) дереу қабылдануы мүмкін. Басқа жағдайларда, қонғаннан кейін деректер тіркеліп, талданса, аздаған кідірістер (секундтар) қолайлы болуы мүмкін.
Маңыздысы, ҰҰА көру қабілеті қоршаған ортаның өзгергіштігіне бейімделуі керек: жарқын күн сәулесі, көлеңкелер, жел тудыратын қозғалыстың бұлыңғырлығы, жапырақтардың бір-біріне қабаттасып бітелуі немесе биіктік пен бұрыштың өзгеруі. Нысандардың өлшемдері әртүрлі (жақын арамшөптер және алыстағы зиянкестер шоғырлары), сондықтан детекторлар көп масштабты ерекшеліктерді басқаруы керек.
Соңында, ауылшаруашылық пилотсыз ұшу аппараттарының миссиялары дәлдік, кідіріс және энергия арасында қатаң ымыраға келуді талап етеді. Арамшөптер мен зиянкестердің жоғалып кетуіне жол бермеу үшін жоғары анықтау дәлдігі қажет, бірақ өте терең желіні іске қосу батареяны тез таусуы мүмкін. Сондықтан анықтау моделі жылдам және энергияны үнемдейтін, сонымен бірге тапсырманы орындау үшін жеткілікті дәл болуы керек. Бұл қатаң талаптар ауылшаруашылығындағы пилотсыз ұшу аппараттары үшін мамандандырылған модель дизайнының неліктен қажет екенін көрсетеді.
Ұшқышсыз ұшу аппараттары платформаларына арналған жеңіл нысан детекторлары
Жеңіл нысан детекторлары - шектеулі жабдықта жұмыс істеуге арналған нейрондық желілер. Олар көбінесе шағын магистральдарды (мысалы, MobileNet немесе ShuffleNet), қабат енін азайтқанды немесе мойын/бас дизайнын жеңілдеткенді пайдаланады. Мысалы, YOLO тұқымдас модельдеріне параметрлері аз және операцияларды аз қажет ететін (FLOP) “нано” және “кішкентай” нұсқалар (мысалы, YOLOv8n, YOLOv5s) кіреді.
Мұндай детекторлар NVIDIA Jetson Nano немесе Google Coral сияқты ендірілген аппараттық құралдарда секундына ондаған кадр жылдамдығымен жұмыс істей алады. Мысалы, Ag-YOLO пальма плантацияларына арналған арнайы YOLO негізіндегі детектор болды, ол Intel Neural Compute Stick 2 құрылғысында секундына 36,5 кадр жылдамдықпен жұмыс істеді (тек 1,5 Вт қуатты пайдаланып) және жоғары дәлдікке қол жеткізді (F1 = 0,9205). Бұл модель YOLOv3-Tiny-ге қарағанда жылдамдығын екі есеге арттыра отырып, шамамен 12 есе аз параметрлерді пайдаланды.

Бұл мысалдар модель дизайнындағы ымыраларды көрсетеді: модельдің өлшемін немесе күрделілігін азайту (мысалы, қабаттарды немесе арналарды азайту) әдетте қорытынды жасауды жылдамдатады және энергияны тұтынуды азайтады, бірақ дәлдікті төмендетуі мүмкін. Ag-YOLO жылдамдық пен тиімділікті арттыру үшін кейбір мүмкіндіктерден бас тартты, бірақ тапсырмасында 0,92 жоғары F1 ұпайын сақтап қалды.
Сол сияқты, арамшөптерді анықтау үшін үш YOLOv7 нұсқасы салыстырылды: толық YOLOv7 83% дәлдігіне қол жеткізді, ал кішірек YOLOv7-w6 торы 63% дәлдігіне дейін төмендеді. Бұл жалпы жеңіл детекторлардың шектеуін көрсетеді: бір ортаға немесе нысан түріне бапталған модельдер басқасында нашар жұмыс істеуі мүмкін. Жылдамдық үшін кішірейтілген детектор нәзік белгілерді (мысалы, кішкентай немесе жасырын арамшөптер) жіберіп алуы мүмкін, бұл әртүрлі жағдайларда беріктікке зиян келтіреді.
Ауыл шаруашылығында бұл жалпы жеңіл желілер қосымша реттеусіз оңтайлы болмауы мүмкін. Мысалы, жалпы деректер жиынтығында алдын ала дайындалған YOLOv7 моделі дақыл кескіндерінің бірегей текстуралары мен масштабтарын мінсіз өңдей алмауы мүмкін. Демек, модель архитектурасын тапсырмаға және платформаға тән оңтайландыру қажет. Әрбір жаңа дрон түрі немесе дақыл сорты үшін қолмен баптау (қабаттарды, сүзгілерді және т.б. ауыстыру) көп еңбекті қажет етеді. Бұл берілген дрон платформасы мен ауыл шаруашылығы қолданбасы үшін өлшем, дәлдік және беріктіктің ең жақсы тепе-теңдігін табуға автоматтандырылған әдістерді - мысалы, орналастыруға бейім NAS - ынталандырады.
Ұшқышсыз ұшу аппараттарына негізделген көру жүйелерінде нейрондық архитектураны іздеу
Нейрондық архитектураны іздеу (NAS) - нейрондық желі архитектураларын жобалаудың автоматтандырылған әдісі. NAS қабаттар, сүзгілер және қосылымдар санын қолмен орнатудың орнына, ықтимал дизайндар кеңістігін зерттеу және таңдалған мақсатты (мысалы, дәлдікті) оңтайландыратындарды табу үшін алгоритмдерді (күшейтуді оқыту, эволюциялық әдістер немесе градиентке негізделген іздеу) пайдаланады.
NAS мобильді құрылғыларға ыңғайлы желілерді құру үшін қолданылған. Мысалы, Google компаниясының MnasNet жүйесі мақсатқа нақты құрылғының кідірісін тікелей қосқан алғашқы “платформаға бейім” NAS болды. MnasNet іздеу кезінде әрбір үміткер моделі үшін Google Pixel телефонында қорытынды уақытын өлшеді және осы өлшенген кідіріске қарсы дәлдікті теңестірді. Нәтижесінде мобильді жабдықта жылдам және дәл жұмыс істейтін CNN сериясы пайда болды, олар ImageNet-те қолмен жасалған MobileNets және NASNet модельдерінен асып түсті.
Дегенмен, MnasNet сияқты жалпы NAS тәсілдері жалпы көру тапсырмаларына (ImageNet жіктемесі немесе COCO анықтау) және жалпы аппараттық құралдарға (мысалы, ұялы телефондар) бағытталған. Ұшқышсыз ұшу аппараттарының дақылдарын бақылау үшін мәселе мамандандырылған. Біз детекторлардың белгілі бір объектілер кластарына (өсімдіктер, арамшөптер, зиянкестер) оңтайландырылғанын және Ұшқышсыз ұшу аппараттарының сенсорлары мен ұшу профиліне бейімделгенін қалаймыз. Тек дәлдік немесе жалпы кідіріс үшін оңтайландыратын стандартты NAS шағын объектілерді анықтау немесе энергия шектеулері сияқты нюанстарды ескермеуі мүмкін.
Сонымен қатар, дәстүрлі NAS әдістері есептеу тұрғысынан өте қымбат болуы мүмкін (көбінесе үлкен GPU кластерлерінде бірнеше күн жұмыс істеуді қажет етеді), бұл ауыл шаруашылығы зерттеушілері үшін әрқашан практикалық бола бермейді. Сондықтан, ҰҰА көру үшін тапсырмаға тән NAS құрылымдары қажет. Олар ҰҰА-ға қатысты критерийлерді қамтуы және мүмкіндігінше тиімді болуы керек.
Барлық жағдайларда шектеулерді білу өте маңызды: NAS нысана құрылғысының шектеулерін (MnasNet-ке ұқсас) және ұшу кезіндегі ҰҰА тапсырмаларының нақты уақыт режиміндегі талаптарын білуі керек. Егер іздеу тым баяу болса немесе энергия шығынын ескермесе, алынған модель іс жүзінде далада жақсы жұмыс істемеуі мүмкін.
Іс жүзінде, UAV көру үшін NAS іздеу метрикасына аппараттық кідіріс пен энергияны тікелей қосады. Мысалы, нақты дрон компьютерінде (мысалы, NVIDIA Jetson) кандидат детекторының кадр жиілігін өлшеп, оны балл ретінде пайдалануға болады. Бұл нақты жылдамдықты түсірмейтін FLOP сияқты қарапайым проксилерді пайдаланудан айырмашылығы бар.
Осылайша, NAS құрылғының мүмкіндіктерін ең жақсы пайдаланатын архитектураларды таба алады. Қорытындылай келе, NAS ұшқышсыз ұшу аппараттарына арналған детекторларды автоматты түрде жобалау тәсілін ұсынады, бірақ ол ұшқышсыз ұшу аппараттарына тән тапсырмалар мен тиімділік талаптарын ескере отырып бейімделуі керек.
Орналастыруға бейім NAS: Негізгі қағидаттар
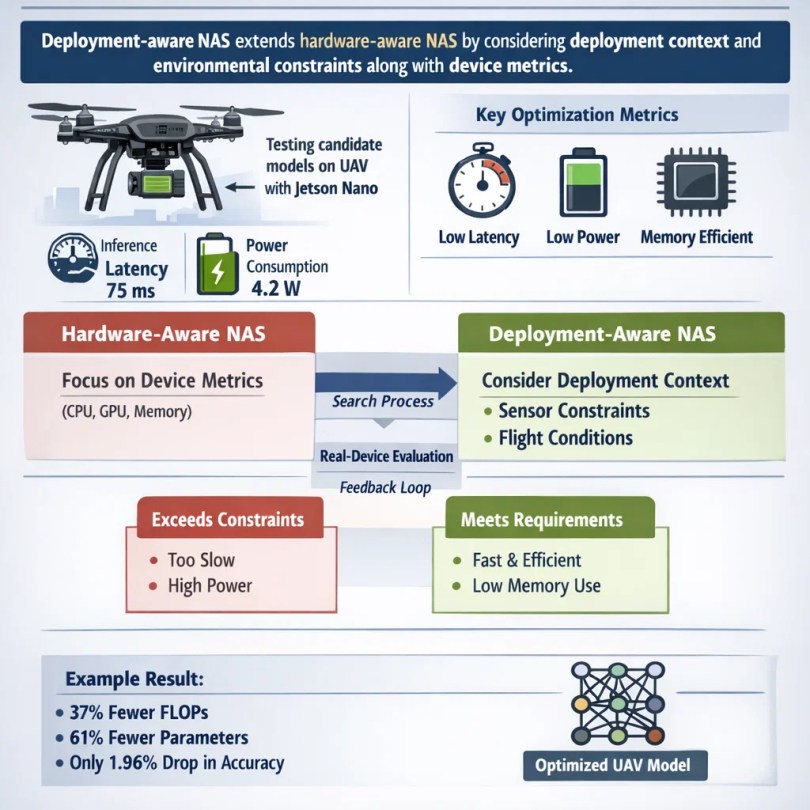
Орналастыруға бейім NAS жобалау процесіне орналастыру контексті мен қоршаған орта шектеулерін қосу арқылы аппараттық құралдарға бейім NAS-ты кеңейтеді. Басқаша айтқанда, ол тек дронның аппараттық құралдарын (CPU/GPU жылдамдығы, жад шектеулері, энергия бюджеті) ғана емес, сонымен қатар дронның далада нақты кездесетін нәрселерін де ескереді. Бұл мақсатты құрылғыдағы болжамдық кідіріс, қуат тұтыну және жад көлемі сияқты көрсеткіштерді нақты оңтайландыруды білдіреді, сонымен бірге жоғары анықтау дәлдігін іздейді.
Мысалы, NAS кезінде әрбір үміткер моделін ұшқышсыз ұшу аппаратына бекітілген Jetson Nano құрылғысына орналастыруға және оның нақты әлемдегі уақыт пен энергияны пайдалану туралы қорытындысын жазуға болады. Бұл эмпирикалық кері байланыс орналастыру критерийлеріне шынымен сәйкес келетін модельдерді іздеуге бағыт береді.
Аппараттық құралдарға бейімделген NAS (MnasNet сияқты) құрылғы көрсеткіштеріне баса назар аударады, ал орналастыруға бейімделген NAS одан әрі қарай жүреді: ол сенсордың кіріс сипаттамаларын (мысалы, кескін ажыратымдылығы, көп спектрлі арналар) және қолданбаның кідіріс мақсаттарын (секундына кадрлар қажет) ескеруі мүмкін. Ол тіпті максималды рұқсат етілген жад сияқты ұшу шектеулерін немесе желдің сілкінісі немесе қозғалыс бұлыңғырлығын модельдеу кезіндегі бағалауларды қамтуы мүмкін.
Орналастыруға бейім NAS, мысалы, 5 Вт қуат тұтынудан асатын немесе дронға қарағанда көбірек жадты қажет ететін архитектураларды жазалауы мүмкін. Осылайша, іздеу, әрине, ҰҰА-ның далалық жұмысына арналған практикалық модельдерге бағытталған. Негізінде, орналастыруға бейім NAS модель дизайны мен нақты өмірде пайдалану арасындағы ілмекті жабу туралы. Архитектураны оқшау таңдап, оның жұмыс істеуін үміттенудің орнына, ол іздеу кезінде нақты құрылғыны жүйелі түрде сынақтан өткізуді қамтиды.
Мысалы, Керек және т.б. (2026) осындай құрылымды пайдаланып, ҰҰА детекторын іздеді: олар YOLOv8n базалық деңгейіне сүйенді, бірақ іздеуге Jetson Nano кідірісі мен энергиясын қосты. Нәтижесінде алынған модельде YOLOv8n-ге қарағанда 37% аз GFLOP және 61% аз параметрлер болды, mAP тек 1,96% төмендеді. Бұл орналастыру шектеулерінің NAS-ты әлдеқайда жеңіл және жылдам желіге қалай бағыттағанын анық көрсетеді.
Дәл ауыл шаруашылығын бақылаудағы орналастыруға бейімделген NAS жүйесінің рөлі
Орналастыруға бейім NAS детекторларды ауылшаруашылық жағдайларына бейімдеу арқылы ҰҰА дақылдарын бақылауды айтарлықтай жақсарта алады. Мысалы, іздеу кішкентай, жұқа нысандарды (мысалы, тар арамшөптер немесе жұқа жүгері көшеттері) анықтауда немесе өсімдіктерді топырақ фондан ажыратуда ерекшеленетін архитектураларға қол жеткізуге мүмкіндік береді. Ол желінің тереңдігін және қабылдау өрістерін әдеттегі ұшу биіктігіне реттей алады: төмен биіктікте нысандар кескінді толтырады және ұсақ бөлшектерді қажет етуі мүмкін, ал жоғары биіктікте желі шағын көлемде анықтауда жақсы болуы керек. Орналастыруға бейім NAS бұл талаптарды өзінің іздеу кеңістігіне кодтай алады.
Жылдамдық далада өте маңызды. Дрон зиянкестердің таралуын анықтағанын елестетіп көріңіз; егер модель, айталық, 30 кадр/сек жылдамдықпен бейнені өңдеуге жеткілікті жылдам болса, ол ұшқышты ескерте алады немесе дереу емдеу әрекетін бастайды. Сынақтарда NAS жасаған модель оңтайландырылған архитектурасының арқасында Jetson Nano-да стандартты YOLOv8n-ге қарағанда 28% жылдамырақ жұмыс істеді. Сондай-ақ, ONNX жұмыс уақытында 18,5% аз энергия жұмсады, яғни дрон бір батареямен ұзағырақ ұша алады. Бұл жетістіктер ұшу кезінде шешім қабылдауды мүмкін етеді және миссияның ұзақтығын ұзартады.
Беріктік - тағы бір артықшылығы. Орналастыруға бейімделген NAS нақты құрылғыны бағалауды қамтитындықтан, іздеу әртүрлі жағдайларда сынақтарды қамтуы мүмкін. Мысалы, ол аз жарықты модельдеуі немесе таң атқаннан және ымырттан жаттығу кескіндерін қамтуы мүмкін, бұл соңғы детектордың нақты ауа райы мен жарықтандыру өзгерістерінде дәлдікті сақтауын қамтамасыз етеді. Жұмыс NAS-тан алынған детектордың жақсы жалпыланғанын көрсетті: олар оны екі түрлі дақыл деректер жиынтығында (бидай бастары мен мақта көшеттері) сынап көрді және екеуінде де жақсы өнімділік тапты.

Бұл орналастыруға бейімделген NAS ауыл шаруашылығы үшін ортақ, пайдалы мүмкіндіктерді табуға көмектескенін, жаңа салаларға жалпылауды жақсартқанын көрсетеді. Жалпы алғанда, орналастыруға бейімделген NAS дәлдікті ұшу уақытын ұзартумен теңестіруге көмектеседі. Есептеуді қысқарту арқылы дрондар аз қуат пайдаланады және батарея заряды бойынша көбірек аумақты қамти алады, сонымен бірге дақылдар мен зиянкестерді сенімді түрде анықтайды.
Ауыл шаруашылығына арналған ұшқышсыз ұшу аппараттарының детекторларына арналған ғарыштық дизайнды іздеу
Орналастыруға бейімделген NAS жүйесінің маңызды бөлігі - іздеу кеңістігі, ол қарастыратын мүмкін желілік дизайндар жиынтығы. Ұшқышсыз ұшу аппараттарының дақыл детекторлары үшін іздеу кеңістігін осы сала үшін перспективалы архитектураларды қамтитындай етіп жасауға болады. Негізгі бөліктерге мыналар жатады:
1. Арқалық құрылымы: Негізгі құрылым - мүмкіндіктерді ажыратқыш. Ұшқышсыз ұшу аппараттары үшін тереңдік бойынша бөлінетін иірімдер (MobileNet-те қолданылатындай) немесе төңкерілген қалдық блоктар сияқты жеңіл иірім құрылымдық блоктарды қамтуы мүмкін. Төңкерілген қалдықтар мен сызықтық бөгеттер (MobileNetV2 стилі) мобильді тиімділігімен танымал. Іздеу кеңістігі Ұшқышсыз ұшу аппаратының есептеу бюджетіне сәйкес келетін әрбір блоктың енін (арналар санын) және тереңдігін өзгертуге мүмкіндік береді. Егер Ұшқышсыз ұшу аппараты оларды төмен қуатта сатып ала алса, назар аудару немесе трансформаторға негізделген модульдер де қосылуы мүмкін.
2. Мойын дизайны: Көптеген нысан детекторлары көп масштабты мүмкіндіктерді біріктіру үшін мүмкіндік пирамидаларын (FPN) немесе жол агрегация желілерін пайдаланады. Іздеу жеңілдетілген FPN немесе жеңіл мүмкіндік агрегациясын зерттей алады. Мысалы, бір масштабты бастарды және көп масштабты бастарды пайдалану нұсқалар болуы мүмкін. Бұл кеңістік қабаттарды біріктіруге немесе әртүрлі өлшемдегі нысандарды анықтауға көмектесетін қосылымдарды өткізіп жіберуге мүмкіндік беруі мүмкін.
3. Бастың дизайны: Анықтау басын (жіктеу және қорап регрессиясының қабаттары) да өзгертуге болады. Біркелкі өрістерді қарайтын ұшқышсыз ұшу аппараттары үшін қарапайым басы жеткілікті болуы мүмкін. Бірақ ұсақ арамшөптерді аулау үшін іздеуге қосымша иілу қабаттары немесе әртүрлі бекіту схемалары кіруі мүмкін.
4. Жеңіл операциялар: Іздеу кеңістігі тек арзан операцияларға ғана рұқсат ете алады. Мысалы, 3×3 конверсияны арзанырақ 1×3+3×1 факторизацияланған конверсиямен таңдау немесе GhostNet модульдерін қосу. Сондай-ақ, есептеуді шектеу үшін ядроның кіші өлшемдеріне немесе кішірейтілген өлшемдерге рұқсат ете алады. Бұл таңдаулардың барлығы аппараттық құралдармен басқарылады. Кеңістік дронның жад шегінен немесе күтілетін энергия шегінен асатын кез келген қабат конфигурациясына тыйым салуы мүмкін.
Осы іздеу кеңістігін мұқият жобалау арқылы NAS процесі тиімді, бірақ тиімді архитектураларға бағытталады. Нәтижесінде стандартты модельдерде қарастырылмаған блоктардың жаңа үйлесімі пайда болуы мүмкін. Ең жақсы табылған детектор GFLOP-тарды YOLOv8n-мен салыстырғанда 37%-ге және параметрлерді 61%-ге қысқартатын арнайы блок таңдауларын пайдаланды.
Бұл мүмкін болды, себебі NAS ұшқышсыз ұшу аппараттарының шектеулері бойынша магистральдық және бас элементтерін араластырып, сәйкестендіре алды. Қорытындылай келе, ауылшаруашылық ұшқышсыз ұшу аппараттарының детекторларын іздеу кеңістігі борттық жабдықтың шектеулері шегінде масштабталатын, жеңіл құрылыс блоктарына және көп масштабты басқаруға бағытталған.
Оңтайландыру мақсаттары мен шектеулері
Орналастыруға бейім NAS бірнеше мақсаттарды үйлестіруі керек. Негізгі мақсат әдетте дақылдарды бақылау деректер жиынтықтарында өлшенгендей анықтау дәлдігі (мысалы, орташа орташа дәлдік, mAP). Мысалы, mAP@50 (50% IOU дәлдік) кең таралған метрика болып табылады. NAS-пен оңтайландырылған модельде базалық YOLOv8n-мен салыстырғанда mAP@50-де тек 1,96% төмендеу болды, бұл қол жеткізілген жетістіктер үшін өте аз шығын. Негізгі кластар (арамшөптер, дақылдар) бойынша дәлдік және еске түсіру (немесе F1 ұпайы) да ескеріледі.
Сонымен қатар, кідіріс пен энергияны оңтайландыру қажет. Кідіріс - бұл бір кескінге шаққандағы қорытынды уақыты; ендірілген GPU үшін ол 20-50 мс немесе одан да көп болуы мүмкін. Төмен кідіріс кадр жиілігінің жоғарылауын білдіреді. Энергия тұтынуы (кадрға шаққандағы джоуль) ұшу төзімділігі үшін өте маңызды. Жад ізі (параметрлер саны, модель өлшемі) тағы бір шектеу болып табылады; модельдер құрылғының жедел жадына сәйкес келуі керек. Сондықтан, NAS әдетте бұл шектеулер үшін мақсат немесе айыппұл белгілейді.
Мысалы, белгілі бір шекті деңгейден баяу немесе параметр бюджетінен жоғары кез келген модель төмендетілуі мүмкін. Бұл NAS-ты көп мақсатты оңтайландыру мәселесіне айналдырады: кідіріс, энергия және өлшемді азайта отырып, дәлдікті барынша арттыру.
Іс жүзінде мұны мақсаттардың салмақталған қосындысы немесе қатаң шектеулер арқылы жасауға болады. Кейбір әдістер кез келген үміткерге ҰҰА қуат шегінен асып түссе, үлкен айыппұл салады. Басқалары энергия метрикасын анық есептейді: модельдер “энергия тиімділігін” өлшеу үшін ONNX жұмыс уақыты бойынша сыналды, ал ең жақсы модель YOLOv8n-ге қарағанда +18.5% энергия тиімдірек болды. Бұл олардың іздеуін басқаратын мақсаттардың бірі болды.
Табылған ымыраларды Парето шекарасында көруге болады: бір жағынан, дәлдігі төмен өте жылдам шағын модельдер; екінші жағынан, дрон үшін тым баяу немесе қуатты көп қажет ететін үлкен дәлдіктегі модельдер. Орналастыруға бейім NAS осы шекарада нақты миссия басымдықтарына сәйкес келетін жақсы орынды табуға тырысады (мысалы, үлкен жылдамдық үшін дәлдіктің аздап жоғалуы). Қорытындылай келе, NAS дәлдік көрсеткіштерін (mAP, F1) және қорытынды шектеулерін (кадрға мс, кадрға джоуль, жад) бірге қарастыруы керек. Бұл теңдестірілген оңтайландыру модельді ҰҰА пайдалануға шынымен дайын етеді.
Шынайы ауылшаруашылық жағдайларында оқыту және бағалау
NAS-та табылған детекторлардың жақсы жұмыс істеуі үшін оларды нақты ауылшаруашылық деректері бойынша оқыту және тексеру қажет. Бұл нақты егістіктердің өзгергіштігін көрсететін деректер жиынтығын пайдалануды білдіреді: әртүрлі дақыл түрлері, өсу кезеңдері, жыл мезгілдері, жарықтандыру жағдайлары және биіктіктер. Мысалы, тек жас жүгері өскіндері бойынша оқыту піскен бидай бастарына жалпыламауы мүмкін. Егістік репрезентативті деректер жиынтығы модельдің фермада маңызды ерекшеліктерді үйренуін қамтамасыз етеді. Дрондардың қозғалысы мен жарықтандыруын имитациялау үшін оқыту кезінде деректерді көбейтуді (кездейсоқ дақылдар, жарықтықтың өзгеруі, қозғалыстың бұлыңғырлығы) да қолдануға болады.

Бағалау кезінде модельді мүмкіндігінше нақты жағдайларда сынақтан өткізу маңызды. Модельдеу құралдары көмектесе алады (мысалы, виртуалды дронды 3D өрістерінде ұшу), бірақ нақты ұшу сынақтары алтын стандарт болып табылады. Борттық бенчмаркинг модельді нақты дрон аппараттық құралдарында іске қосу арқылы жүзеге асырылады. NAS-тан кейін олар кандидатты Jetson Nano-ға орналастырды және 28.1% жылдамырақ қорытынды шығарды (базалық YOLOv8n-мен салыстырғанда) және энергияны жақсырақ пайдалануды өлшеді. Нақты құрылғыдан кері байланыстың бұл түрі іздеудің талаптарға шынымен сәйкес келетін модельді шығарғанын растайды.
Жалпылау да өте маңызды. Модельді бір дақыл бойынша (мысалы, бидай) іздеуге және оқытуға болады, бірақ фермерлерге егістік алқаптарында жұмыс істейтін детекторлар қажет. Зерттеу дақылдар арасындағы күшті жалпылауды көрсетті: бір тапсырма бойынша оқытудан өткен NAS-тан алынған детектор қайта оқытусыз басқа дақылдар деректер жиынтығында (мақта көшеттері) жақсы жұмыс істеді. Бұл орналастыруға бейім NAS сенімді архитектуралар бере алатынын көрсетеді. Дегенмен, домендік ауысулар (мысалы, жүгері алқаптарынан бақшаларға көшу) әлі де жетілдіруді немесе одан әрі іздеуді қажет етуі мүмкін. Маусымаралық тестілеу (жазғы және күзгі бейнелер) де ұсынылады.
Соңында, әрбір жаңа модель орналастыру алдында ҰҰА платформасында салыстырмалы түрде тексерілуі керек. Бұған оның дәлдігі мен жылдамдығын дрондарда тіркеу, жабдықтың қызып кетпеуін қамтамасыз ету және қуат тұтынуын тексеру кіреді. Тек сонда ғана фермерлер оған маңызды мониторинг үшін сене алады. Далалық жұмысқа қатысты оқыту мен жабдықты мұқият бағалауды біріктіру арқылы орналастыруға бейім NAS тек теориялық тұрғыдан тиімді ғана емес, сонымен қатар далада дәлелденген детекторларды береді.
Қолмен жасалған PUA детекторларынан артықшылықтары
Орналастыруға бейімделген NAS дәстүрлі, қолмен жасалған ұшқышсыз ұшу аппараттарының модельдерімен салыстырғанда бірнеше айқын артықшылықтарды ұсынады:
1. Жақсы өнімділік компромисстері: NAS-та табылған модельдер дәлдік-жылдамдық-энергия тиімділігінің жоғары үйлесімдерін қамтамасыз етуге бейім. Мысалы, ең жақсы модель Jetson Nano-да қолмен таңдалған YOLOv8n базалық деңгейіне қарағанда 28% жылдамырақ жұмыс істеді және 18,5% аз энергия жұмсады, ал анықтау mAP-та тек ~2% жоғалтты. Мұндай тепе-теңдікке қол жеткізу өте қиын болар еді.
2. Жалпылауды жақсарту: NAS анықтаған модельдер жаңа жағдайларға бейімделгіш болуы мүмкін, себебі іздеу әртүрлі деректерді немесе мақсаттарды қамтуы мүмкін. Автоматты түрде жасалған детектор әртүрлі дақыл түрлеріне (бидай және мақта) және жарықтандыру жағдайларына жақсы сәйкес келеді. Ұшулар күтпеген жағдайларға тап болған кезде бұл кең беріктік өте маңызды.
3. Инженерлік күш-жігердің азаюы: NAS көптеген сынақ және қателіктерді автоматтандырады. Қабат өлшемдерін қолмен өзгертудің және көптеген кандидаттарды сынаудың орнына, орналастыруды білетін NAS таңдауларды қайталап зерттейді және сіз үшін ең жақсы дизайнды табады. Бұл әзірлеу уақыты мен тәжірибесін үнемдейді, детекторларды жаңа тапсырмалар немесе жабдық үшін жаңартуды жеңілдетеді.
4. Масштабталу: Орнатылғаннан кейін, NAS құрылымын әртүрлі ҰҰА платформалары немесе миссиялары үшін пайдалануға болады. Мысалы, сол орналастыруды білетін NAS шектеу енгізулерін өзгерту арқылы басқа камера ажыратымдылығына немесе дрон моделіне реттелген детекторды іздей алады. Бұл әр сценарий үшін желілерді нөлден бастап қайта жобалаудан әлдеқайда масштабталатын.
Қиындықтар мен шектеулер
Орналастыруға бейімделген NAS қуатты, бірақ сиқырлы оқ емес. Оны ресурстарға деген сұранысты және мақсатты ортаның өзгергіштігін ескере отырып, ойластырылған түрде қолдану керек. Уәдесіне қарамастан, орналастыруға бейімделген NAS келесі қиындықтарға тап болады:
1. Іздеудің жоғары құны: NAS айтарлықтай есептеулерді қажет етуі мүмкін. Тиімді алгоритмдер болғанның өзінде, архитектура кеңістігін іздеу GPU-да көптеген сағаттарды (немесе мамандандырылған есептеулерді) алуы мүмкін. Егер мұқият басқарылмаса, іздеу шығындары кейбір командалар үшін өте жоғары болуы мүмкін.
2. Деректердің ауытқуы және доменнің ығысуы: NAS тек пайдаланылған деректер сияқты жақсы. Егер жаттығу кескіндері далалық жағдайларды көрсетпесе, табылған архитектура іс жүзінде нашар жұмыс істеуі мүмкін. Мысалы, бір дақыл түріне немесе бір географиялық аймаққа бейімделген модель одан әрі бейімделмей екіншісіне мінсіз ауыса алмауы мүмкін.
3. Аппараттық құралдардың гетерогенділігі: Ұшқышсыз ұшу аппараттарының жабдықтары әртүрлі нұсқаларда келеді (әртүрлі ендірілген графикалық процессорлар, процессорлар, FPGA). Бір платаға оңтайландырылған модель басқа платада оңтайлы болмауы мүмкін. Орналастыруға бейім NAS әр платформа үшін іздеуді қайта іске қосуы немесе барлығына сәйкес келетін консервативті шектеулерді пайдалануы керек, бұл өнімділікті шектеуі мүмкін.
4. Практикалық шектеулер: Ауыл шаруашылығын нақты орналастыру желіні әуе арқылы жаңарту, жүйені ұшуды басқарумен біріктіру және қауіпсіздік сертификаттау сияқты мәселелерді қамтиды. Тіпті ең жақсы NAS моделі де толық дрон жүйесіне біріктірілуі керек. Модель жаңартуларын үйлестіру, реттеуші органдардың мақұлдауы және фермерлерді оқыту техникалық емес кедергілер болып табылады.
Болашақ бағыттар
Болашақта модель дизайнының, сенсорлық технологияның және ұшқышсыз ұшу аппараттарын басқарудың одан да тығыз интеграциясы болады. Орналастыруға бейімделген NAS осы бірлескен жобалау процесінде негізгі құрал болып қала береді. Болашаққа көз жүгіртсек, бірнеше қызықты бағыттар пайда болады:
1. Онлайн және бейімделгіш NAS: Бір реттік офлайн іздеудің орнына, болашақ жүйелер желіні нақты уақыт режимінде немесе ұшулар арасында реттеуі мүмкін. Мысалы, дрон базалық модельден басталып, жеңіл NAS алгоритмдерін пайдаланып, жаңа жарықтандыруды немесе жер бедерінің жағдайларын ұшу кезінде өңдеу үшін өзін реттей алады. Бұл “құрылғыдағы NAS” өте қиын, бірақ бейімделуді айтарлықтай жақсарта алады.
2. Сенсорлар мен модельдерді бірлесіп жобалау: Болашақтағы дәл ауыл шаруашылығы жүйелері камераны (RGB, көпспектрлі, инфрақызыл) және нейрондық желіні таңдауды бірлесіп оңтайландыра алады. Орналастыруға бейім NAS іздеуге сенсор параметрлерін (мысалы, пайдаланылатын спектрлік жолақтар) қосу арқылы аппараттық құрал мен модельдің ең жақсы үйлесімін таба алады.
3. Мультиспектрлік/гиперспектрлік интеграция: Мақта ауруын зерттеу көрсеткендей, көп спектрлі кескіндерді біріктіру, әсіресе ерте кезеңдегі мәселелерді анықтауды жақсарта алады. Болашақ NAS өсімдіктердің нәзік өзгерістерін сенімдірек анықтау үшін RGB және жақын инфрақызыл арналарды біріктіретін көп ағынды модельдерді зерттей алады.
4. Автономды шешім қабылдау құбырлары: Түптеп келгенде, NAS-пен оңтайландырылған детекторлар толық автономияға қол жеткізе алады. Мысалы, дрон белгілі бір жағдайларды анықтаған жағдайда автоматты түрде бүрку жоспарын жасай алады немесе ферма басшыларына ескерту жасай алады. Орналастыруға бейім NAS жүйесін бүкіл жүйені оңтайландыра отырып, толық құбырларға (анықтау + әрекет модельдері) кеңейтуге болады.
5. Этикалық және экологиялық мәселелер: Ұшқышсыз ұшу аппараттарының мүмкіндіктері артқан сайын, біз құпиялылықты, әуе кеңістігінің қауіпсіздігін және ауыл шаруашылығындағы еңбекке әсерін ескеруіміз керек (Агравал мен Арафат атап өткендей). NAS-пен оңтайландырылған дрондардың ауыл шаруашылығында жауапкершілікпен пайдаланылуын қамтамасыз ету - болашақтағы маңызды мақсат.
Қорытынды
Орналастыруға бейім NAS жеңіл нысан детекторларын UAV негізіндегі дақылдарды бақылау үшін бейімдеудің қуатты тәсілін ұсынады. Іздеуге UAV аппараттық құралдары мен тапсырма шектеулерін енгізу арқылы ол дәлдікті көп жоғалтпай есептеу мен энергияны үнемдейтін модельдер жасайды. Мысалы, жақында жүргізілген жұмыстар NAS жобалаған детектордың YOLOv8n анықтамалық нұсқасына қарағанда 37% аз FLOP және 61% аз параметрлерді пайдаланатынын көрсетті, бірақ оның mAP мәні тек ~2%-ге төмендеді.
Нақты дрон жабдықтарында бұл 28% жылдамырақ қорытынды жасауды және 18% энергия тиімділігін арттыруды білдірді. Мұндай жетістіктер ұшу уақытын ұзартуға, талдауды жылдамдатуға және ауыл шаруашылығын қолдауға көбірек жауап береді. Қолмен жасалған модельдермен салыстырғанда, орналастыруға бейім NAS өнімділікті жақсырақ жалпылауды, қолмен баптау күш-жігерін азайтуды және жаңа ҰҰА платформаларына масштабталуды қамтамасыз етеді.
Дәл егіншілік тұрғысынан бұл жетілдірулер дрондармен дақылдарды бақылауды практикалық және тиімдірек ете алады. NAS-пен оңтайландырылған детекторлармен жабдықталған дрондар арамшөптерді, зиянкестерді немесе күйзелісті сенімдірек анықтай алады, бұл ресурстарды үнемдеуге және өнімділікті арттыруға уақтылы араласуға мүмкіндік береді. Ауыл шаруашылығы дрондар мен жасанды интеллектті енгізуді жалғастырған сайын, орналастыруға бейім NAS сол дрондарда жұмыс істейтін модельдердің тиімді, дәл және егістікке дайын болуын қамтамасыз етуде маңызды рөл атқарады. Ол заманауи нейрондық желілік зерттеулер мен фермерлердің практикалық қажеттіліктері арасындағы алшақтықты жояды, деректерге негізделген, дәл егіншіліктің болашағын дамытуға көмектеседі.