無人航空機(UAV)、いわゆるドローンは、畑を上空から迅速に観察できるため、現代農業を大きく変革しています。ドローンは、作物の健康状態、生育段階、害虫、雑草、収穫量の予測などに利用されています。例えば、中国では現在25万機以上の農業用ドローンが稼働しており、タイでは2023年までに約301トンの農地がドローンによる散布やモニタリングの対象となりました。これらのUAVは、地上では見逃されがちな問題(害虫の発生や水不足など)を迅速に検知することで、農業の効率化に貢献しています。.
しかし、小型UAVは搭載コンピューティング能力とバッテリー寿命が非常に限られています。そのため、複雑なAIビジョンアルゴリズムをリアルタイムで実行することは困難です。従来の軽量物体検出モデル(小型のYOLOやMobileNetベースの検出器など)では、これらのニーズを部分的にしか満たすことができません。多くの場合、精度や速度が犠牲になり、大幅な手動調整が必要になります。このギャップを克服するために、展開状況を考慮したニューラルアーキテクチャ探索(NAS)が開発されました。これは、現場に展開されたUAVの正確な要件に合わせて深層学習モデルを最適化する自動設計手法です。.
現代の精密農業では、UAV(ドローン)を用いて圃場を調査し、作物の状態を監視しています。ドローンは広範囲を飛行することで、植物、土壌、圃場のパターンを高解像度で撮影できます。これらの画像は、作物間の雑草を検出したり、収量(果実や穂の数など)を推定したり、病気や栄養不足の初期兆候を発見したりするコンピュータービジョンアルゴリズムに入力されます。例えば、ドローンを使えば雑草の群生地に的を絞って除草剤を散布できるため、化学薬品の使用量とコストを削減できます。.
しかし、ドローンに搭載されている小型のオンボードコンピュータ(多くの場合、数ワット程度の電力に制限されている)では、飛行速度で大規模なニューラルネットワークを実行するのは困難です。そのため、リアルタイム分析が難しくなります。ドローンが問題を発見した場合、バッテリーが切れる前に迅速に対応したり、データを記録したりする必要があるからです。現在の軽量検出器(例:YOLOv8 nano、YOLO-tiny、MobileNets)は手作業で設計されており、多くの場合トレードオフが伴います。モデルを小さくすると処理速度は向上しますが、精度が低下する可能性があります。.
そのため、UAVの制約条件を考慮した上で最適なモデルを自動的に見つける手法が強く求められています。展開状況を考慮したNASは、実際のUAV環境下で検出精度とリソース使用量(レイテンシ、電力、メモリ)を同時に最適化するニューラルネットワークアーキテクチャを探索することで、このニーズに応えます。このアプローチにより、ドローンハードウェア上で効率的に動作しながらも、作物監視タスクにおいて高い精度を維持する、特殊なモデルを提供できます。.
作物監視におけるUAV物体検出の要件
農業用UAVは、それぞれに特有の要件を持つ、さまざまな視覚的検出タスクを実行します。
1. 作物の健康状態とストレスの検出: ドローンはRGBカメラ、サーマルカメラ、マルチスペクトルカメラを使用して、ストレスを受けた植物、栄養不足、または病気の症状を特定します。リアルタイムアルゴリズムは圃場のばらつきをマッピングし、灌漑や施肥をガイドします。植物のストレス兆候を正確に検出することで、タイムリーな介入が可能になり、収量を守ることができます。.
2. 雑草の識別: 作物の中に混じる雑草を検出することで、農家は不要な植物だけに除草剤を散布でき、除草剤の使用量を削減できる。例えば、綿畑を対象とした研究では、YOLOv7ベースの検出器を搭載したUAV画像を使用し、雑草と綿花を約83%の精度で分離することに成功した。しかし、雑草と作物が混在する畑の画像では、視覚的に類似した雑草と作物を区別することは依然として難しい。.

3. 害虫・病気の検出: UAV(無人航空機)は、地上にいる人間よりも早く害虫の発生(例えば、バッタ、昆虫、真菌病害など)を発見できます。また、ドローンはマルチスペクトル画像を用いて害虫被害地域のマッピングを支援し、RGB画像のみの場合よりも精度が向上します。迅速かつ正確な害虫検出は、蔓延を防ぐために不可欠です。.
4. 収量予測: 空中から果物、穀物の穂、植物の数を数えることは、収穫量を予測するのに役立ちます。UAV(無人航空機)画像上でリンゴ、メロン、小麦の穂を検出するように訓練されたモデルは、収量推定を加速させることができます。例えば、ドローン画像上のニューラルネットワークは、畑のスイカやメロンの収穫量を数えるために使用されています。.
5. 測量と地図作成: ドローンは、耕作計画に役立つ圃場地図(地形、土壌の違いなど)も作成します。厳密には物体検出ではありませんが、これはUAVによる監視の一部を構成します。.
これらのタスクでは、ほぼリアルタイムの推論が求められることが多い。例えば、畑の上空を飛行するドローンは、高度調整や噴霧器の作動といった制御判断を即座に行えるよう、ビデオフレームをリアルタイム(毎秒数フレーム)で処理する必要がある。一方、着陸後にデータを記録・分析する場合は、数秒程度の遅延が許容される場合もある。.
重要なのは、UAVの視覚システムが、強い日光、影、風によるモーションブラー、重なり合う葉による遮蔽、高度や角度の変化といった環境変動に対応しなければならない点です。対象物のサイズも様々であるため(近距離の雑草と遠距離の害虫の群集など)、検出器はマルチスケールの特徴を処理できなければなりません。.
最後に、農業用UAVのミッションでは、精度、遅延、エネルギー消費の間に厳しいトレードオフが生じます。雑草や害虫の見落としを防ぐためには高い検出精度が必要ですが、非常に深いネットワークを運用するとバッテリーを急速に消耗させてしまいます。そのため、検出モデルは、タスクに必要な精度を維持しながら、高速かつエネルギー効率の良いものでなければなりません。こうした厳しい要件は、農業用UAVに特化したモデル設計が必要な理由を明確に示しています。.
UAVプラットフォーム向け軽量物体検出器
軽量物体検出器は、限られたハードウェア上で動作するように特別に設計されたニューラルネットワークです。多くの場合、小型のバックボーン(MobileNetやShuffleNetなど)、層幅の縮小、または簡略化された首/頭部構造を採用しています。例えば、YOLOファミリーモデルには、パラメータ数が少なく、演算量(FLOPs)も少ない「nano」バージョンや「tiny」バージョン(YOLOv8n、YOLOv5sなど)があります。.
このような検出器は、NVIDIA Jetson NanoやGoogle Coralなどの組み込みハードウェア上で、毎秒数十フレームの速度で動作させることができます。例えば、Ag-YOLOは、ヤシ農園向けに開発されたYOLOベースのカスタム検出器で、Intel Neural Compute Stick 2上で毎秒36.5フレーム(消費電力わずか1.5W)で動作し、高い精度(F1スコア=0.9205)を達成しました。このモデルは、YOLOv3-Tinyに比べてパラメータ数が約12分の1でありながら、速度は2倍になっています。.

これらの例は、モデル設計におけるトレードオフを示しています。モデルのサイズや複雑さを軽減する(例えば、レイヤーやチャネル数を減らす)と、通常は推論速度が向上し、エネルギー消費量も減少しますが、精度が低下する可能性があります。Ag-YOLOは、速度と効率性を向上させるために容量をいくらか犠牲にしましたが、それでもタスクにおいて0.92という高いF1スコアを維持しました。.
同様に、雑草検出に関して3つのYOLOv7バリアントを比較したところ、フルバージョンのYOLOv7は83%の精度を達成したが、小型のYOLOv7-w6ネットワークは63%の精度に低下した。これは、汎用軽量検出器の限界を示している。ある環境や物体タイプに合わせて調整されたモデルは、別の環境では性能が低下する可能性がある。速度を重視して軽量化された検出器は、微妙な手がかり(例えば、小さくてカモフラージュされた雑草)を見逃す可能性があり、さまざまな条件下での堅牢性を損なう可能性がある。.
農業分野では、こうした汎用的な軽量ネットワークは、さらなる調整なしには最適とは言えない場合があります。例えば、一般的なデータセットで事前学習されたYOLOv7モデルでは、作物画像の独特な質感やスケールを完璧に処理できない可能性があります。そのため、モデルアーキテクチャをタスクやプラットフォームに合わせて最適化する必要があります。ドローンの種類や作物の品種ごとに手動で調整(レイヤーやフィルターの変更など)を行うのは、非常に手間がかかります。こうしたことから、特定のUAVプラットフォームと農業用途において、サイズ、精度、堅牢性の最適なバランスを見つけるために、展開状況を考慮したNASなどの自動化手法が求められています。.
UAVベースのビジョンシステムにおけるニューラルアーキテクチャの探索
ニューラルアーキテクチャ探索(NAS)は、ニューラルネットワークのアーキテクチャを設計するための自動化された手法です。NASは、レイヤー数、フィルタ数、接続数を手動で設定する代わりに、アルゴリズム(強化学習、進化的手法、勾配ベースの探索など)を使用して、可能な設計の空間を探索し、選択した目的(精度など)を最適化する設計を見つけ出します。.
NASは既にモバイルフレンドリーなネットワークの構築に活用されています。例えば、GoogleのMnasNetは、実際のデバイス遅延を目的関数に直接組み込んだ、先駆的な「プラットフォーム対応型」NASでした。MnasNetは、検索中に各候補モデルについてGoogle Pixelスマートフォン上での推論時間を測定し、この測定された遅延と精度とのバランスを取りました。その結果、モバイルハードウェア上で高速かつ高精度なCNN群が実現し、ImageNet上では手動で設計されたMobileNetやNASNetモデルを凌駕する性能を発揮しました。.
しかし、MnasNetのような汎用的なNASアプローチは、一般的な画像処理タスク(ImageNet分類やCOCO検出など)と一般的なハードウェア(例えば携帯電話)に焦点を当てています。UAVによる作物監視の場合、問題はより特殊です。特定のオブジェクトクラス(植物、雑草、害虫)に最適化され、UAVのセンサーと飛行プロファイルに合わせた検出器が必要です。精度や一般的な遅延のみを最適化する標準的なNASでは、小さなオブジェクトの検出やエネルギー制約などの微妙な点が見落とされる可能性があります。.
また、従来のNAS手法は計算コストが非常に高く(大規模なGPUクラスタで数日かかる場合が多い)、農業研究者にとって必ずしも実用的ではありません。そのため、UAVビジョンにはタスク固有のNASフレームワークが必要です。これらはUAVに関連する基準を取り入れ、可能な限り効率的でなければなりません。.
いずれの場合も、制約認識は極めて重要です。NASは、ターゲットデバイスの制約(MnasNetと同様)と、飛行中のUAVタスクのリアルタイム要求を認識していなければなりません。検索が遅すぎたり、エネルギー消費を無視したりすると、結果として得られるモデルは現場でうまく機能しない可能性があります。.
実際には、UAVビジョン向けのNASでは、ハードウェアのレイテンシとエネルギー消費量を検索指標に直接含めることになります。例えば、候補となる検出器のフレームレートを実際のドローンコンピュータ(NVIDIA Jetsonなど)で測定し、それをスコアとして使用することができます。これは、実際の速度を捉えられないFLOPsのような単純な指標を用いる場合とは対照的です。.
そうすることで、NASはデバイスの機能を最大限に活用できるアーキテクチャを発見できる。要約すると、NASはUAV用の検出器を自動的に設計する方法を提供するが、UAV固有のタスクと効率要件を考慮して調整する必要がある。.
導入を考慮したNAS:基本原則
展開状況を考慮したNASは、ハードウェアを考慮したNASを拡張し、設計プロセスに展開状況と環境制約を組み込むことで、より高度なNASを実現します。つまり、ドローンのハードウェア(CPU/GPU速度、メモリ制限、エネルギー予算)だけでなく、UAVが実際に現場で遭遇する状況も考慮に入れます。これは、高い検出精度を維持しながら、ターゲットデバイスでの推論遅延、消費電力、メモリ使用量といった指標を明示的に最適化することを意味します。.
例えば、NAS(ネットワーク支援システム)の運用中に、UAV(無人航空機)に搭載されたJetson Nanoに各候補モデルを展開し、実際の推論時間とエネルギー消費量を記録することができる。このような実証的なフィードバックは、展開基準を真に満たすモデルを探す上で役立つ。.
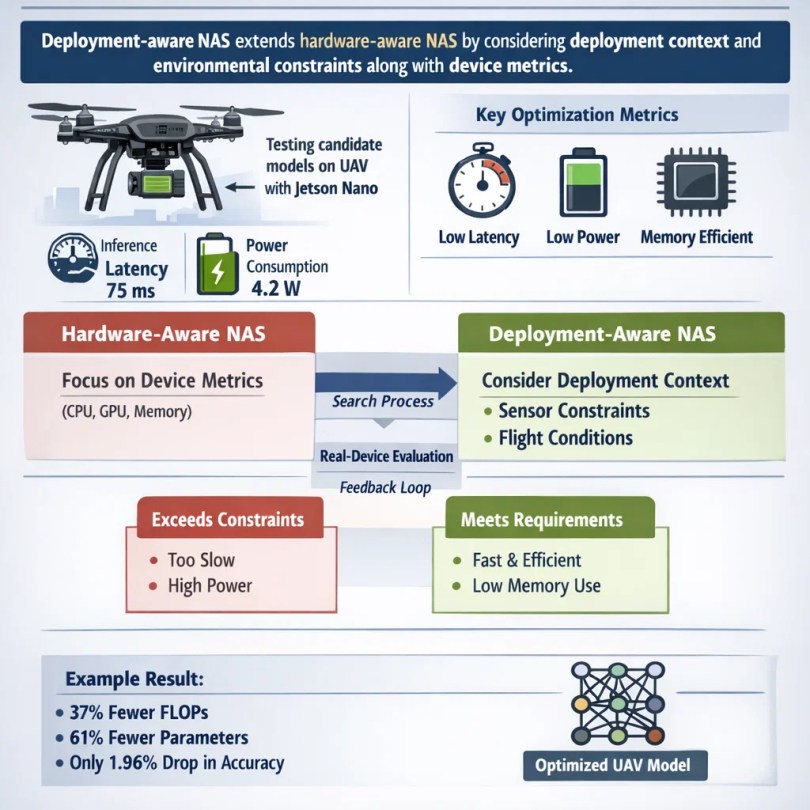
ハードウェア対応NAS(MnasNetなど)はデバイスのメトリクスに重点を置くのに対し、展開対応NASはさらに踏み込み、センサー入力特性(画像解像度、マルチスペクトルチャネルなど)やアプリケーションのレイテンシ目標(必要なフレーム/秒)を考慮する場合があります。さらに、最大許容メモリなどの飛行制約を組み込んだり、風の揺れやモーションブラーをシミュレートした状態での評価を含めたりすることも可能です。.
展開状況を考慮したNASは、例えば5Wを超える消費電力や、ドローンが搭載できるメモリ容量を超えるメモリを必要とするアーキテクチャを不利な条件で除外する可能性があります。こうすることで、検索は自然とUAVの現場運用に適した実用的なモデルへと偏ります。つまり、展開状況を考慮したNASとは、モデル設計と実際の使用との間のループを閉じることなのです。アーキテクチャを単独で選択してうまくいくことを期待するのではなく、検索中に実機テストを体系的に組み込みます。.
例えば、Kerecら(2026)はこのようなフレームワークを用いてUAV検出器を探索しました。YOLOv8nをベースラインとして構築しましたが、探索にJetson Nanoのレイテンシとエネルギーを含めました。結果として得られたモデルは、YOLOv8nよりもGFLOPsが37%少なく、パラメータも61%少なく、mAPの低下はわずか1.96%でした。これは、展開上の制約がNASをより軽量で高速なネットワークへと導いたことを明確に示しています。.
精密農業モニタリングにおける展開認識型NASの役割
展開状況を考慮したNASは、検出器を農業環境に合わせて調整することで、UAVによる作物監視を大幅に改善できます。例えば、細長い雑草やトウモロコシの苗など、小さくて細い物体を検出するのに優れたアーキテクチャや、植物と土壌の背景を区別するのに適したアーキテクチャを優先的に選択できます。また、ネットワークの深度や受容野を飛行高度に合わせて調整することも可能です。低高度では、画像全体に物体が写り込むため、細かいディテールが求められる場合がありますが、高高度では、ネットワークは小規模な物体の検出に優れている必要があります。展開状況を考慮したNASは、これらの要件を検索空間に組み込むことができます。.
現場では速度が非常に重要です。ドローンが害虫の発生を検知したと想像してみてください。モデルが例えば30fpsでビデオを処理できるほど高速であれば、パイロットに警告を発したり、即座に駆除作業を開始したりできます。テストでは、NASが設計したモデルは、最適化されたアーキテクチャのおかげで、標準のYOLOv8nよりもJetson Nano上で28%高速に動作しました。また、ONNXランタイムでは18.5%少ないエネルギーで動作したため、同じバッテリーでドローンの飛行時間を延ばすことができます。これらの改善により、飛行中の意思決定がより容易になり、ミッションの継続時間が延長されます。.
堅牢性も利点の一つです。展開を考慮したNASは実際のデバイス評価を含むため、さまざまな条件下でのテストを実施できます。例えば、低照度環境をシミュレートしたり、夜明けや夕暮れ時のトレーニング画像を含めたりすることで、最終的な検出器が実際の天候や照明の変化下でも精度を維持できることを保証できます。この研究では、NAS由来の検出器が優れた汎化性能を示すことが実証されました。2種類の作物データセット(小麦の穂と綿の苗)でテストしたところ、どちらにおいても高い性能を発揮しました。.

これは、展開状況を考慮したNASが農業における共通の有用な機能の発見に役立ち、新たな分野への汎用性を向上させたことを示唆しています。全体として、展開状況を考慮したNASは、精度と飛行時間の長さのバランスを取るのに役立ちます。計算量を削減することで、ドローンは消費電力を抑え、バッテリー1回の充電でより広い範囲をカバーできるようになり、同時に作物や害虫を確実に検出できます。.
農業用UAV検出器の探索空間設計
展開を考慮したNASの重要な要素は、探索空間、つまり検討対象となるネットワーク設計の集合です。UAV作物検出器の場合、探索空間は、この分野において有望なアーキテクチャを含むように構築できます。主な構成要素は以下のとおりです。
1. バックボーン設計: バックボーンとなるのは特徴抽出器です。UAVの場合、MobileNetで使用されているような深層分離畳み込みや、逆残差ブロックといった軽量な畳み込み構成要素を含めることができます。逆残差と線形ボトルネック(MobileNetV2スタイル)は、モバイル環境での効率性の高さでよく知られています。探索空間では、UAVの計算能力に合わせて各ブロックの幅(チャネル数)と深さを調整できます。UAVが低消費電力で動作させることが可能であれば、アテンション機構やトランスフォーマーに着想を得たモジュールも組み込むことができます。.
2. ネックデザイン: 多くの物体検出器は、マルチスケールの特徴を組み合わせるために、特徴ピラミッド(FPN)またはパス集約ネットワークを使用しています。本研究では、簡略化されたFPNや軽量な特徴集約を検討することができます。例えば、単一スケールのヘッドとマルチスケールのヘッドのどちらを使用するかといった選択肢が考えられます。また、プーリング層やスキップ接続を用いることで、異なるサイズの物体を検出するのに役立つ可能性もあります。.
3. ヘッドデザイン: 検出ヘッド(分類層とボックス回帰層)も変更可能です。均一な畑を対象とするUAVの場合、よりシンプルなヘッドで十分かもしれません。しかし、小さな雑草を検出するには、追加の畳み込み層や異なるアンカー方式が必要になる場合があります。.
4. 軽量な運用: 探索空間では、低コストの操作のみを明示的に許可することができます。例えば、3×3畳み込みと、より安価な1×3+3×1因数分解畳み込みのどちらを選択するか、あるいはGhostNetモジュールを含めるかどうかなどです。また、計算量を制限するために、カーネルサイズを小さくしたり、次元を削減したりすることも可能です。これらの選択はすべてハードウェアによって決定されます。探索空間では、ドローンのメモリ制限や想定されるエネルギー閾値を超えるレイヤー構成は禁止される場合があります。.
この探索空間を慎重に設計することで、NASプロセスは効果的かつ効率的なアーキテクチャへと導かれます。その結果、標準モデルでは考慮されていない斬新なブロックの組み合わせが生まれる可能性があります。最良の検出器は、YOLOv8nと比較してGFLOPsを37%、パラメータを61%削減するカスタムブロック選択を採用しました。.
これは、NASがUAVの制約下でバックボーン要素とヘッド要素を自由に組み合わせることができたため可能になった。要約すると、農業用UAV検出器の探索領域は、搭載ハードウェアの制約内で、拡張性があり軽量な構成要素とマルチスケール処理に焦点を当てている。.
最適化の目的と制約
展開を考慮したNASは、複数の目標を同時に達成する必要があります。主な目標は通常、作物モニタリングデータセットで測定される検出精度(平均平均精度、mAPなど)です。例えば、mAP@50(50% IOUでの精度)は一般的な指標です。NAS最適化モデルは、ベースとなるYOLOv8nと比較してmAP@50がわずか1.96%低下しただけであり、得られた利益に対して損失は非常に小さいものでした。主要なクラス(雑草、作物)の精度と再現率(またはF1スコア)も考慮されます。.
同時に、レイテンシとエネルギー消費も最適化する必要があります。レイテンシとは画像ごとの推論時間のことで、組み込みGPUの場合は20~50ミリ秒以上になることもあります。レイテンシが低いほどフレームレートは高くなります。エネルギー消費量(フレームあたりのジュール)は飛行時間にとって非常に重要です。メモリ使用量(パラメータ数、モデルサイズ)も制約の一つで、モデルはデバイスのRAMに収まる必要があります。そのため、NASは通常、これらの制約に対して目標値またはペナルティを設定します。.
例えば、特定のしきい値よりも遅いモデルや、パラメータの許容範囲を超えるモデルは、ランクが下げられる可能性があります。これにより、NASは実質的に多目的最適化問題となります。つまり、レイテンシ、エネルギー消費、およびサイズを最小限に抑えながら、精度を最大化するという問題です。.
実際には、これは目的関数の加重和または厳密な制約によって実現できます。一部の手法では、UAVの電力制限を超える候補に大きなペナルティを与えます。他の手法では、エネルギー指標を明示的に計算します。ONNXランタイムでモデルをテストして「エネルギー効率」を測定したところ、最良のモデルはYOLOv8nよりも+18.5%エネルギー効率が優れていました。これは、彼らの探索を導く目的の1つでした。.
見出されたトレードオフはパレート最適解として視覚化できます。一方の端には、精度は低いものの非常に高速な小型モデルがあり、もう一方の端には、ドローンには遅すぎたり電力消費が大きすぎたりする、高精度な大型モデルがあります。展開を考慮したNASは、この最適解上で、実際のミッションの優先順位(例えば、大幅な速度向上と引き換えにわずかな精度低下)に合致する最適なポイントを見つけることを目指します。つまり、NASは精度指標(mAP、F1)と推論制約(フレームあたりのミリ秒数、フレームあたりのジュール数、メモリ使用量)を同時に考慮する必要があります。このバランスの取れた最適化こそが、モデルをUAVでの使用に真に即したものにするのです。.
現実的な農業環境における訓練と評価
NASが発見した検出器が適切に機能するためには、現実的な農業データで学習およびテストを行う必要があります。これは、実際の圃場の多様性(作物の種類、生育段階、季節、照明条件、高度など)を捉えたデータセットを使用することを意味します。例えば、若いトウモロコシの芽の画像のみで学習させた場合、成熟した小麦の穂には適用できない可能性があります。圃場を代表するデータセットを使用することで、モデルは農場で重要な特徴を学習できます。また、学習中にデータ拡張(ランダムな作物、明るさの変化、モーションブラーなど)を適用することで、ドローンの動きや照明を模倣することもできます。.

評価を行う際には、可能な限り実環境に近い条件下でモデルをテストすることが重要です。シミュレーションツール(例えば、3Dフィールド上で仮想ドローンを飛行させるなど)は役立ちますが、実際の飛行テストが最良の基準です。オンボードベンチマークは、実際のUAVハードウェア上でモデルを実行することによって行われます。NASの後、候補モデルをJetson Nanoに展開し、推論速度が28.1%向上(ベースラインのYOLOv8nと比較して)し、エネルギー効率も改善されたことを測定しました。このような実機からのフィードバックは、探索によって要件を真に満たすモデルが生成されたことを裏付けています。.
汎化性能も非常に重要です。モデルは特定の作物(例えば小麦)で探索・学習されるかもしれませんが、農家は様々な畑で機能する検出器を必要としています。本研究では、作物間の汎化性能の高さが実証されました。あるタスクで学習されたNAS由来の検出器は、再学習なしで別の作物データセット(綿の苗)でも良好な性能を発揮しました。これは、展開状況を考慮したNASが堅牢なアーキテクチャを生み出す可能性を示唆しています。ただし、ドメインの変更(例えばトウモロコシ畑から果樹園への移動)には、微調整やさらなる探索が必要になる場合があります。季節をまたいだテスト(夏と秋の画像)も推奨されます。.
最後に、すべての新モデルは、展開前にUAVプラットフォーム上でベンチマークテストを受ける必要があります。これには、ドローン上での精度と速度の記録、ハードウェアの過熱防止、消費電力の検証などが含まれます。そうして初めて、農家はミッションクリティカルな監視に安心して使用できるのです。現場に関連したトレーニングと厳密なハードウェア評価を組み合わせることで、展開を考慮したNASは、理論的に効率的であるだけでなく、現場で実証済みの検出器を生み出します。.
手動設計のUAV検出器に対する利点
展開状況を考慮したNASは、従来の手動設計のUAV向けモデルに比べて、いくつかの明確な利点を提供します。
1. パフォーマンスのトレードオフの改善: NASで発見されたモデルは、精度、速度、エネルギー効率の面でより高いバランスを実現する傾向があります。例えば、最適なモデルは、手動で選択したYOLOv8nベースラインと比較して、Jetson Nano上で28%高速に動作し、18.5%少ないエネルギー消費で済み、検出mAPの低下は約2%にとどまりました。このようなバランスを手動で実現するのは非常に困難です。.
2. 汎化性能の向上: NASによって発見されたモデルは、多様なデータや目的を組み込むことができるため、新しい状況への適応性が高い。自動設計された検出器は、異なる作物(小麦と綿)や照明条件においても優れた汎用性を示した。このような幅広い堅牢性は、飛行中に予期せぬ状況に遭遇した場合に非常に重要となる。.
3. エンジニアリング作業の削減: NASは多くの試行錯誤を自動化します。レイヤーサイズを手動で調整したり、多数の候補をテストしたりする代わりに、デプロイメントを考慮したNASは選択肢を繰り返し検討し、最適な設計を見つけ出します。これにより、開発時間と専門知識を節約でき、新しいタスクやハードウェアに合わせて検出器を簡単に更新できます。.
4. 拡張性: 一度設定すれば、NASフレームワークはさまざまなUAVプラットフォームやミッションに利用できます。例えば、同じ展開状況に対応したNASは、制約入力を変更するだけで、異なるカメラ解像度やドローンモデルに対応した検出器を検索できます。これは、シナリオごとにネットワークをゼロから再設計するよりもはるかに拡張性に優れています。.
課題と限界
導入環境を考慮したNASは強力ですが、万能薬ではありません。リソース要件と対象環境の多様性を考慮し、慎重に導入する必要があります。導入環境を考慮したNASは有望ですが、課題も存在します。
1. 高い検索コスト: NASは相当な計算能力を必要とする場合があります。効率的なアルゴリズムを用いたとしても、アーキテクチャ空間の探索にはGPUで何時間も(あるいは専用の計算ツールを使って)かかることがあります。適切に管理しないと、探索のオーバーヘッドが一部のチームにとって大きな負担となる可能性があります。.
2. データバイアスとドメインシフト: NASの性能は、使用するデータの質に左右されます。トレーニング画像が実際の現場状況を反映していない場合、構築されたアーキテクチャは現実世界では性能が低下する可能性があります。例えば、ある作物タイプや地域に合わせて調整されたモデルは、追加の調整なしには他の作物タイプや地域に完全に適用できない場合があります。.
3. ハードウェアの異質性: UAVのハードウェアには様々な種類(異なる組み込みGPU、CPU、FPGAなど)が存在する。あるボードに最適化されたモデルが、別のボードでは最適とは限らない。展開状況を考慮したNASは、プラットフォームごとに検索を再実行するか、すべてのプラットフォームに適合する保守的な制約を使用する必要があるが、後者の場合はパフォーマンスが制限される可能性がある。.
4. 実務上の制約: 実際の農業現場での導入には、無線によるネットワークアップデート、飛行制御システムとの統合、安全認証といった課題が伴います。たとえ最高レベルのNASモデルであっても、ドローンシステム全体に統合する必要があります。モデルアップデートの調整、規制当局の承認、農家へのトレーニングなどは、技術的な側面だけでなく、様々な障壁となります。.
今後の方向性
将来的には、モデル設計、センサー技術、UAV制御の統合がさらに緊密になる可能性が高い。展開を考慮したNASは、この共同設計プロセスにおいて重要なツールであり続けるだろう。今後、いくつかの有望な方向性が見出される。
1. オンライン対応型適応型NAS: 将来のシステムは、一度限りのオフライン検索ではなく、リアルタイムまたは飛行の合間にネットワークを調整するようになるかもしれない。例えば、ドローンは基本モデルから出発し、軽量なNASアルゴリズムを使用して、飛行中に新しい照明条件や地形条件に対応するように微調整することができる。この「オンデバイスNAS」は非常に困難な課題だが、適応性を大幅に向上させる可能性がある。.
2. センサーとモデルの共同設計: 将来の精密農業システムでは、カメラ(RGB、マルチスペクトル、赤外線)の選択とニューラルネットワークの最適化を同時に行うことができるようになるだろう。展開状況を考慮したNASは、センサーパラメータ(使用されるスペクトルバンドなど)を検索対象に含めることで、ハードウェアとモデルの最適な組み合わせを見つけることができるようになる。.
3. マルチスペクトル/ハイパースペクトル統合: 綿花病害の研究が示唆するように、マルチスペクトル画像を統合することで、特に初期段階の問題の検出精度を高めることができる。将来のNASは、RGBと近赤外線チャンネルを融合させたマルチストリームモデルを研究し、植物の微妙な変化をより確実に検出できるようになる可能性がある。.
4. 自律的な意思決定パイプライン: 最終的には、NASに最適化された検出器が完全な自律性を実現する可能性もある。例えば、ドローンが特定の状況を検知した場合、自動的に散布計画を作成したり、農場管理者に警告を発したりするようになるかもしれない。展開状況を考慮したNASは、エンドツーエンドのパイプライン(検知+アクションモデル)に拡張することで、システム全体を最適化できるだろう。.
5.倫理的および環境的配慮: UAVの性能が向上するにつれ、プライバシー、空域の安全性、そして農業労働への影響(AgrawalとArafatが指摘しているように)を考慮する必要が出てくる。NASに最適化されたドローンが農業において責任ある方法で使用されるようにすることは、今後の重要な目標である。.
結論
展開状況を考慮したNASは、UAVベースの作物監視向けに軽量物体検出器をカスタマイズするための強力なアプローチです。UAVのハードウェアとミッションの制約を探索に組み込むことで、精度を大きく損なうことなく計算量とエネルギーを節約できるモデルを生成します。例えば、最近の研究では、NASで設計された検出器は、基準となるYOLOv8nよりも37%少ないFLOPsと61%少ないパラメータを使用しているにもかかわらず、mAPの低下はわずか約2%にとどまっていることが示されました。.
実際のドローンハードウェアでは、推論速度が28%向上し、エネルギー効率が18%向上しました。こうした改善により、飛行時間の延長、分析速度の向上、そしてより迅速な農業支援が可能になります。手動で作成したモデルと比較して、展開状況を考慮したNASは、パフォーマンスの汎用性が高く、手動による調整作業が少なく、新しいUAVプラットフォームへの拡張性も優れています。.
精密農業の分野において、これらの改良により、UAVによる作物モニタリングはより実用的かつ効果的なものとなる。NAS最適化検出器を搭載したドローンは、雑草、害虫、ストレスをより確実に検知できるため、タイムリーな介入が可能となり、資源の節約と収穫量の増加につながる。農業分野でドローンとAIの導入が進むにつれ、展開を考慮したNASは、ドローン上で動作するモデルの効率性、精度、そして現場での実用性を確保する上で中心的な役割を果たすことになるだろう。NASは、最先端のニューラルネットワーク研究と農家の実務的なニーズとのギャップを埋め、データ駆動型の精密農業の未来を切り拓く一助となる。.