Precizna poljoprivreda je moderan pristup utemeljen na podacima koji koristi napredne tehnologije za prilagođavanje poljoprivrede specifičnim uvjetima na terenu. Na primjer, poljoprivrednici koriste GPS, IoT senzore, dronove i analitiku za praćenje vlažnosti tla, vremena i zdravlja usjeva u stvarnom vremenu. Zatim primjenjuju točnu količinu vode, gnojiva ili pesticida koja im je potrebna, na pravom mjestu i u pravo vrijeme. Ovaj pametni pristup poboljšava učinkovitost i prinos uz smanjenje otpada; jedno izvješće napominje da su precizne metode postigle povećanje proizvodnje usjeva od otprilike 4% i smanjenje upotrebe herbicida od 9%. U tom kontekstu, Model Predictive Control (MPC) pojavio se kao snažna strategija kontrole za poljoprivredu.
MPC koristi matematički model poljoprivrednog sustava za predviđanje budućeg ponašanja i izračunavanje optimalnih kontrolnih radnji tijekom pomičnog vremenskog horizonta. U svakom koraku rješava problem optimizacije kako bi se minimizirali troškovi (na primjer, odstupanje od ciljane vlažnosti tla ili potrošnje energije) podložni ograničenjima vode, ograničenjima opreme itd. Budući da MPC gleda unaprijed i prilagođava se promjenjivim uvjetima, idealan je za upravljanje složenim, ograničenim procesima u poljoprivredi. Kontrolni sustavi poput MPC-a ključni su u modernoj poljoprivredi, gdje uzgajivači moraju žonglirati s mnogim varijablama (varijabilnost tla, vremenske promjene, faze rasta usjeva) i raditi pod strogim ograničenjima resursa i okoliša.
Predviđanjem budućih potreba (poput nadolazećeg toplinskog vala ili prognoze kiše) i automatskim podešavanjem aktuatora (ventila, prskalica, grijača), MPC omogućuje prilagodljivije donošenje odluka od ručnog ili jednostavnog upravljanja povratnom informacijom. Ovaj prediktivni pristup temeljen na optimizaciji pomaže poljoprivrednicima uštedjeti vodu i energiju te poboljšati prinose – ključne ciljeve u svijetu koji se suočava s ograničenjima resursa i klimatskom nestabilnošću.
Osnove prediktivnog upravljanja modelom
Modelno prediktivno upravljanje (MPC) funkcionira tako da opetovano predviđa buduća stanja sustava i optimizira upravljačke ulaze tijekom konačnog horizonta. Pojavilo se tijekom 1960-ih i 1970-ih, procesne industrije su ga usvojile 1980-ih i od tada je napredovalo kroz klasične, poboljšane, moderne i podatkovno vođene faze - potaknute napretkom u računalnoj snazi, poboljšanim rukovanjem ograničenjima i rastućom integracijom sa strojnim učenjem i znanošću o podacima. Ključni elementi uključuju:
- Model procesa: MPC se oslanja na matematički model (fizički ili utemeljen na podacima) poljoprivrednog procesa (rast usjeva, ravnoteža vode u tlu, klimatska dinamika itd.). Ovaj model predviđa kako će se sustav razvijati s obzirom na ulazne podatke.
- Horizont predviđanja: U svakom koraku upravljanja, model projicira unaprijed fiksni vremenski prozor (horizont predviđanja) koristeći trenutna mjerenja (npr. očitanja senzora) i kandidate za upravljačke akcije.
- Funkcija troškova (cilj): MPC definira trošak ili cilj koji treba smanjiti, kao što su odstupanja od željene vlažnosti ili temperature tla, plus kazne za korištenje resursa.
- Optimizacija: Kontroler rješava problem ograničene optimizacije tijekom razdoblja kako bi pronašao slijed radnji (brzine navodnjavanja, postavke grijača itd.) koji minimizira troškove uz zadovoljavanje ograničenja.
- Rješavanje ograničenja: MPC prirodno uključuje ograničenja ulaza i stanja - na primjer kapacitet pumpe, ograničenja ventila, brzine aktuatora i ograničenja okoliša u pogledu potrošnje vode ili razine hranjivih tvari. Optimizator osigurava da radnje poštuju ta ograničenja.
Nakon rješavanja, MPC primjenjuje prvu kontrolnu radnju u optimiziranom nizu, zatim čeka sljedeći vremenski korak, ponovno mjeri sustav i rješava novu optimizaciju (ovo je shema “odustajanja horizonta” ili “pomicanja optimizacije”). Ova povratna informacija daje MPC-u robusnost na poremećaje i pogreške modela, budući da redovito ažurira predviđanja s novim podacima. Za razliku od tradicionalnih metoda upravljanja:
1. PID regulatori prilagođavaju ulazne podatke samo na temelju trenutnih i prošlih pogrešaka (proporcionalno-integralno-derivativno), bez eksplicitnog predviđanja budućih promjena ili rukovanja ograničenjima. Dobro funkcioniraju za sustave s jednom varijablom, ali se muče s optimizacijom s više varijabli ili strogim ograničenjima.
2. Sustavi temeljeni na pravilima slijede unaprijed postavljene heuristike (npr. uključuju prskalice ako je vlaga < X). Nedostaje im formalna optimizacija i ne mogu lako uravnotežiti konkurentske ciljeve ili se prilagoditi novim uvjetima.
Za usporedbu, prediktivna optimizacija MPC-a čini ga superiornijim za složene poljoprivredne zadatke. Može istovremeno obrađivati više varijabli (temperaturu, vlažnost, CO₂, vodu), zadovoljiti stroga ograničenja i prilagoditi se prognozama (npr. vremenske prognoze mogu se unijeti u model). Glavni kompromis je računalni: rješavanje optimizacije online u svakom koraku zahtijeva veću računalnu snagu. Međutim, moderni procesori i specijalizirani rješavači (npr. OSQP, ACADO) učinili su MPC u stvarnom vremenu izvedivim čak i za poljoprivredne primjene.
Tipičan MPC sustav ima tri komponente: matematički model (može biti zasnovan na fizici ili naučen iz podataka), senzore i izvore podataka (koji pružaju mjerenja tla, vremena, stanja usjeva u stvarnom vremenu) i MPC kontroler/optimizator (koji radi na računalu ili ugrađenom uređaju). Model može simulirati rast usjeva (za optimizaciju prinosa), dinamiku vode u tlu (za navodnjavanje) ili klimu u stakleniku. Senzori mogu uključivati sonde za vlažnost tla, senzore vlažnosti lišća, monitore temperature/vlažnosti ili snimke daljinskog istraživanja. MPC kontroler zatim očitava podatke, predviđa buduća stanja i izračunava upravljačke naredbe (otvaranje ventila, upravljanje traktorima, podešavanje svjetiljki).
Pregled sustava precizne poljoprivrede
Precizna poljoprivreda ima za cilj povećati produktivnost, učinkovitost i održivost korištenjem detaljnih podataka o poljima i usjevima. Umjesto uniformnih praksi, poljoprivrednici sada prilagođavaju postupke lokalnim uvjetima. Na primjer, sastav tla i vlažnost mogu se uvelike razlikovati čak i na jednom polju; precizna tehnologija omogućuje poljoprivredniku da zna koja područja trebaju više gnojiva, a koja manje. Uobičajene ključne tehnologije uključuju:
- IoT senzori i bežične mreže: Sonde za vlažnost tla, temperaturni senzori, EC (slanost tla) sonde i drugi uređaji Interneta stvari kontinuirano mjere uvjete na polju. Ovi senzori šalju podatke sustavima za upravljanje poljoprivrednim gospodarstvima.
- GPS i GIS sustavi: GPS omogućuje precizno mapiranje polja. Poljoprivrednici koriste GIS (geografske informacijske sustave) za izradu karata tla i karata prinosa. Ove karte vode primjenu varijabilnih stopa (VRI) sjemena, vode ili gnojiva.
- Dronovi i satelitske snimke: Zračne snimke (NDVI, termalne, RGB) omogućuju skeniranje zdravlja i stresa usjeva na razini polja. Dronovi također mogu nositi senzore (multispektralne kamere, LiDAR) za praćenje vitalnosti biljaka.
- Softver za upravljanje farmom: Platforme temeljene na oblaku prikupljaju i analiziraju sve te podatke, pomažući poljoprivrednicima da vizualiziraju varijabilnost i donose odluke (npr. gdje navodnjavati ili prskati).
Ove tehnologije transformiraju donošenje odluka. Jedan industrijski izvor objašnjava da praćenjem podataka o tlu i usjevima u stvarnom vremenu, uzgajivači mogu donositi pametnije odluke i primjenjivati inpute samo tamo gdje je potrebno. U praksi, precizna poljoprivreda pokazala je velike koristi: na primjer, korištenje senzora za navodnjavanje s promjenjivom stopom i vlage na američkim farmama moglo bi uštedjeti dodatnih 21% vode. Sveukupno, moderne precizne farme mogu postići veće prinose, brži rast i niže troškove ulaganja donošenjem odluka temeljenih na podacima.
Na primjer, automatizacija navodnjavanja i gnojidbe na temelju podataka senzora znači manje otpada i učinkovitije korištenje resursa. Značajno je da precizne prakse također smanjuju utjecaj na okoliš: nedavna analiza pokazala je da precizne tehnike smanjuju upotrebu herbicida za 9% i potrošnju vode za 4% u prosjeku. Optimizacijom unosa, precizna poljoprivreda minimizira otjecanje i emisije, pomažući farmama da postanu održivije.
Integracija i ključne primjene MPC-a u preciznoj poljoprivredi
Prediktivno upravljanje modelom prirodno se uklapa u pametni poljoprivredni sustav kao "mozak" koji pretvara podatke u akcije. U tipičnom toku, IoT senzori i vanjski podaci (poput vremenskih prognoza) unose se u digitalni model poljoprivrednog procesa (rast usjeva, ravnoteža vode u tlu, klima staklenika itd.). MPC kontroler zatim koristi ovaj model za predviđanje budućih stanja i izračunavanje optimalnih kontrola. Petlja je: osjećanje → modeliranje/predviđanje → optimizacija → aktiviranje.
Na primjer, senzori vlažnosti tla i vremenske prognoze ulijevaju se u model tla i vode. MPC optimizator koristi to za planiranje navodnjavanja tijekom sljedećeg dana ili tjedna, s obzirom na prognoze kiše i temperature. Zatim šalje naredbe ventilima ili pumpama za navodnjavanje. U svakom intervalu mjerenja ažuriraju model i optimizacija se ponavlja. To omogućuje adaptivno upravljanje u stvarnom vremenu koje kontinuirano uzima u obzir nove informacije.
MPC se može pokretati online (u stvarnom vremenu) na poljoprivrednim računalima ili kontrolerima. Za sporije procese (poput sezonskih planova navodnjavanja), može se obavljati offline planiranje, a zatim implementirati raspored. Razlika je u tome što MPC u stvarnom vremenu koristi trenutne podatke u svakom koraku, dok offline MPC koristi fiksni plan koji se ažurira dnevno ili tjedno. Vrhunski koncept je digitalni blizanac farme ili staklenika – virtualna replika poljoprivrednog sustava.
Digitalni blizanac integrira modele tla, usjeva, klime i opreme. Poljoprivrednici mogu testirati strategije kontrole na blizancu (simulacijama) prije nego što ih primijene na stvarnoj farmi. MPC koristi blizanca za predviđanje i optimizaciju na način bez rizika. U budućnosti, napredak u računarstvu u oblaku i 5G-u mogao bi omogućiti snažne simulacije digitalnih blizanaca u hodu, dok rubno računarstvo (lokalni kontroleri) izvršava brzi MPC za robote ili strojeve na licu mjesta. Neke od ključnih primjena MPC-a u preciznoj poljoprivredi su:
1. Upravljanje navodnjavanjem: MPC se široko koristi za učinkovitu kontrolu navodnjavanja. Korištenjem modela vlažnosti tla i vremenske prognoze, MPC predviđa potrebe usjeva za vodom i planira zalijevanje. Osigurava da se postigne ciljana vlažnost tla, a istovremeno minimizira potrošnju vode i poštuje ograničenja pumpe ili opskrbe vodom. Na primjer, MPC kontroler može smanjiti navodnjavanje prije predviđene kiše ili prilagoditi zalijevanje tijekom toplinskog vala. U praksi, prediktivna kontrola navodnjavanja može dramatično smanjiti potrošnju vode - jedno izvješće napominje da navodnjavanje vođeno umjetnom inteligencijom smanjuje potrošnju vode do 35%, a istovremeno povećava prinose za 15–30%. MPC također može implementirati strategije deficitarnog navodnjavanja (namjerno blagi vodni stres) kako bi se poboljšala kvaliteta usjeva (npr. u vinogradima). Balansiranjem prinosa i uštede vode, višeciljni MPC pronalazi optimalne kompromise pod ograničenjima polja.
2. Kontrola klime u staklenicima: Poljoprivreda u kontroliranom okruženju uvelike koristi od MPC-a. Staklenici imaju mnogo međusobno povezanih varijabli: temperaturu, vlažnost, CO₂, svjetlost itd. MPC može istovremeno upravljati svim aktuatorima (grijačima, otvorima, ventilatorima, svjetlima, injektorima CO₂) kako bi učinkovito održavao idealne uvjete rasta. Na primjer, jedna studija o integriranom krovnom stakleniku pokazala je da nelinearna MPC strategija smanjuje potrošnju energije (grijanje/hlađenje) u prosjeku za 15,2% u usporedbi s tradicionalnim upravljanjem. Predviđanjem vanjskih vremenskih promjena i potreba biljaka, MPC održava klimu netaknutom i troškove energije niskim. Može odlučiti, recimo, koliko otvoriti otvore ili pokrenuti grijač prije predviđenog hladnog vala. Sveukupno, MPC donosi značajne uštede energije i CO₂, a istovremeno osigurava maksimalnu udobnost biljaka.
3. Upravljanje gnojivima i hranjivim tvarima: MPC može precizno dozirati gnojiva i hranjive tvari (u tlu ili hidroponici) na temelju modela rasta. Koristeći podatke senzora o razinama hranjivih tvari i fazama rasta usjeva, MPC planira opskrbu hranjivim tvarima kako bi zadovoljio potrebe biljaka bez viška. Ovo precizno doziranje smanjuje otjecanje i otpad gnojiva. Kontroleri također mogu upravljati pH i električnom vodljivošću u hidroponskim otopinama. Na primjer, MPC shema može osigurati ciljanu koncentraciju hranjivih tvari uz minimiziranje ukupne upotrebe, izravno optimizirajući “pravu brzinu, pravo vrijeme, pravo mjesto” 4R principa. Precizna kontrola hranjivih tvari ima dvostruku korist od povećanja prinosa i smanjenja kemijskog onečišćenja. Zapravo, AEM studija primijetila je da precizne prakse poboljšavaju učinkovitost nanošenja gnojiva za oko 7%.
4. Optimizacija rasta usjeva: Osim pojedinačnih procesa, MPC može raditi na modelima rasta usjeva kako bi optimizirao prinos i kvalitetu. Dinamički modeli (npr. DSSAT, AquaCrop) opisuju kako usjev raste pod određenim navodnjavanjem, hranjivim tvarima i klimom. MPC ih može integrirati kako bi odredio optimalne rasporede za zalijevanje, gnojidbu i moguće intervencije protiv štetnika tijekom sezone. Na primjer, može odgoditi navodnjavanje kako bi izazvao željeni stres za kvalitetu ili primijeniti dodatno gnojivo tijekom kritičnih razdoblja rasta. MPC kontroler tako postaje optimizator rasta koji u stvarnom vremenu mijenja poljoprivredne unose kako bi se maksimizirao prinos. Istraživački pregledi ističu rast usjeva i optimizaciju prinosa kao ključnu primjenu MPC-a.
. MPC se također koristi za upravljanje stresom - na primjer za regulaciju vlažnosti krošnje kako bi se ograničile gljivične bolesti uz održavanje rasta.
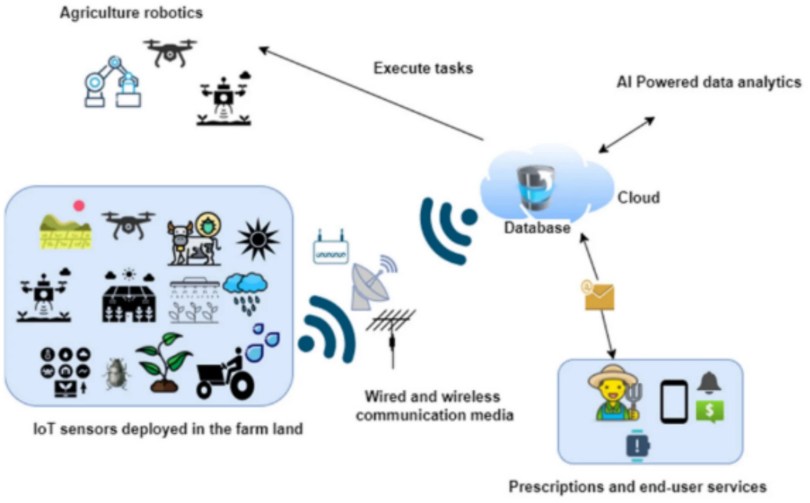
5. Autonomna poljoprivredna oprema: Moderni traktori, prskalice i roboti koriste MPC za planiranje i kontrolu putanje. Na primjer, autonomni dron ili traktor za prskanje mogu koristiti MPC za planiranje svoje putanje i provedbu preciznih terenskih operacija. Gornja slika prikazuje dron koji leti iznad polja - MPC može optimizirati njegovu putanju leta i brzinu prskanja na temelju GPS mapiranja i senzora prepreka. MPC može upravljati dinamikom vozila, poremećajima vjetra i ograničenjima baterije kako bi robot ostao na kursu. U praksi, planeri temeljeni na MPC-u omogućuju opremi da pokrije polja s minimalnim preklapanjem, izbjegava prepreke i prilagođava brzinu u stvarnom vremenu. To rezultira učinkovitim radom (npr. manje goriva, ujednačenije prskanje) i sigurnijom navigacijom. Doista, MPC je poznat po robusnom rukovanju ograničenjima i optimizaciji u stvarnom vremenu u robotici. Moderni traktori bez vozača i robotski kombajni često uključuju MPC ili slične kontrolere temeljene na modelima za navigaciju i izvršavanje zadataka.
Prednosti prediktivnog upravljanja modelom u preciznoj poljoprivredi
Učinkovitost resursa: MPC-ova prediktivna optimizacija dovodi do velikih ušteda. Studije pokazuju da štedi vodu i energiju tako što navodnjavanje i kontrolu klime planira samo kada je potrebno, često štedeći 20–35% vode u usporedbi s naivnim planiranjem. Također omogućuje precizniju upotrebu gnojiva i pesticida, smanjujući upotrebu kemikalija (AEM izvještava o 9% manjoj upotrebi pesticida uz precizne prakse). Ukratko, MPC pomaže poljoprivrednicima da “koriste manje da bi uzgojili više” iskorištavanjem prave količine inputa u različitim uvjetima.
Veći prinos i kvaliteta: Predviđanjem stresa i proaktivnim prilagođavanjem unosa, MPC može poboljšati prinose i kvalitetu usjeva. Održavanje optimalnih uvjeta (vlažnost tla, temperatura, hranjive tvari) tijekom cijele sezone izravno potiče rast biljaka. Na primjer, u mnogim ispitivanjima, kontrola klime temeljena na MPC-u u staklenicima povećala je prinose povrća uz uštedu energije. Pregled MPC-a ističe poboljšanu kvalitetu proizvoda i ekonomske dobitke kao ključne prednosti.
Smanjeni utjecaj na okoliš: Učinkovitija upotreba vode, gnojiva i kemikalija znači manji ekološki otisak. Precizne metode u cjelini dovele su do toga da su milijuni hektara zemlje učinkovito “spašeni” dobivanjem više iz postojećih polja. Doprinos MPC-a tome je jasan: smanjenjem nepotrebnog otjecanja vode i viška gnojiva, smanjuje se ispiranje nitrata i kemijsko onečišćenje. Analiza AEM-a napominje da bi šira primjena precizne tehnologije (uključujući kontrole slične MPC-u) već mogla spriječiti 10,1 milijuna metričkih tona emisija ekvivalenta CO₂, zahvaljujući uštedi zemljišta i goriva.
Rješavanje ograničenja i nesigurnosti: Za razliku od fiksnih regulatora, MPC može izvorno poštovati ograničenja (kapacitet pumpe, ograničenja ventila, propise o zaštiti okoliša) i može optimizirati čak i uz ograničenja resursa. Također može uključivati neizvjesnost prognoze (npr. putem stohastičkog MPC-a) kako bi ostao otporan na pogreške u vremenskoj prognozi. Ova sposobnost predviđanja i prilagodbe neizvjesnosti glavna je snaga.
Automatizacija i skalabilnost: MPC omogućuje veću automatizaciju. Skida rutinsko donošenje odluka s ramena poljoprivrednika, što štedi rad i omogućuje skaliranje. Nakon postavljanja, MPC sustav kontinuirano prilagođava kontrole uz minimalnu intervenciju. Ova skalabilnost znači da se MPC može primijeniti na bilo što, od malog staklenika do velike farme (ovisno o ulaganju) i s vremenom proširiti s više senzora i aktuatora.
Izazovi i ograničenja MPC-a
Računalni zahtjevi: MPC zahtijeva rješavanje optimizacijskog problema u svakom koraku upravljanja. Za velike farme ili brze procese to može biti računalno zahtjevno. MPC u stvarnom vremenu zahtijeva brze procesore ili pojednostavljene modele. Napredak u rješavačima i hardveru (uključujući rubne uređaje) smanjuje ovo opterećenje, ali ostaje izazov, posebno za manje, jeftinije sustave. Pregled MPC-a iz 2024. posebno ističe računalnu složenost kao ključni izazov.
Točnost modela: Performanse MPC-a ovise o točnosti temeljnog modela. Razvijanje pouzdanog modela za biološke sustave (usjevi, tlo, staklenik) je teško. Nesigurnost modela (neusklađenost između modela i stvarnosti) može smanjiti kontrolu. Istraživači to rješavaju putem adaptivnog MPC-a (ažuriranje modela online) ili modela temeljenih na podacima (modeli strojnog učenja). Ipak, dobivanje dobrog modela često zahtijeva značajno stručno znanje u domeni i podatke.
Kvaliteta i dostupnost podataka: MPC treba visokokvalitetne podatke senzora i moguće vremenske prognoze. U poljoprivredi, senzori mogu biti rijetki ili bučni, bežična pokrivenost može biti slaba, a prognoze nesavršene. Nedostajući ili netočni podaci mogu dovesti do neoptimalnih ili nesigurnih kontrolnih radnji. Učinkovito raspoređivanje MPC-a mora uključivati robusnu procjenu stanja ili otkrivanje grešaka (npr. Kalmanove filtere) za rješavanje pogrešaka senzora.
Trošak i složenost: Implementacija MPC-a uključuje troškove (senzori, računala, softver) i zahtijeva tehničko znanje. Malim farmama početna ulaganja mogu biti visoka. Također postoji složenost u konfiguriranju MPC-a (podešavanje horizonta, težina itd.). Prihvaćanje može biti otežano nedostatkom poznavanja: poljoprivrednici mogu preferirati jednostavnije sustave osim ako koristi jasno ne nadmašuju troškove. Kontinuirani rad na poljoprivrednom savjetovanju i platformama jednostavnim za korištenje ima za cilj smanjenje tih prepreka.
Usvajanje od strane poljoprivrednika: Konačno, usvajanje napredne kontrole poput MPC-a ovisi o povjerenju i razumijevanju istog od strane poljoprivrednika. Projekti obuke i demonstracije ključni su. Neki poljoprivrednici mogu biti skeptični prema optimizaciji “crne kutije”. Transparentnost (npr. MPC sučelja koja objašnjavaju odluke) i terenska ispitivanja koja pokazuju povrat ulaganja mogu pomoći u izgradnji povjerenja.
Studije slučaja i implementacije u stvarnom svijetu
Nekoliko pilot projekata i istraživačkih studija pokazuje potencijal MPC-a u poljoprivredi. U stakleničkoj poljoprivredi, nelinearni MPC regulator testiran je na krovu staklenika u New Yorku. Uspješno je regulirao temperaturu, vlažnost i CO₂, optimizirajući potrošnju energije, postižući prosječnu uštedu energije od oko 15,21 TP3T u odnosu na standardne strategije upravljanja. To pokazuje potencijal MPC-a za urbane i visokotehnološke staklenike.
U navodnjavanju, iako su specifična terenska ispitivanja MPC-a još uvijek u nastajanju, srodne tehnologije pokazale su dobitke. Na primjer, inteligentni kontroleri navodnjavanja (često temeljeni na umjetnoj inteligenciji) komercijalno su korišteni, s izvješćima o uštedi vode od 30–35% i značajnom povećanju prinosa. Neka istraživačka gospodarstva integriraju MPC sa senzorima vlage i meteorološkim stanicama; ova ispitivanja pokazuju bolju učinkovitost korištenja vode u usporedbi sa sustavima temeljenim na tajmeru.
Pametni traktori i robotika koji koriste MPC također su u razvoju. Na primjer, autonomne prskalice opremljene prediktivnim planerima puta (MPC aplikacija) testiraju se na velikim farmama. Rana izvješća proizvođača sugeriraju preciznu pokrivenost i smanjeno preklapanje, što se prevodi u manju upotrebu goriva i kemikalija. Pouke iz ovih implementacija ističu važnost pouzdane komunikacije, robusnih senzorskih mreža i jednostavnih nadzornih ploča, ali općenito potvrđuju da MPC može dobro funkcionirati izvan laboratorija.
Naučene lekcije: Terenske implementacije naglašavaju da točni modeli tla i klime čine veliku razliku. U staklenicima, na primjer, kalibracija toplinskog modela prema specifičnoj strukturi staklenika bila je ključna za postizanje pune uštede energije. U navodnjavanju je ključno osigurati da senzori ostanu dobro održavani (kako bi se izbjeglo pomicanje) kako bi MPC imao dobre podatke. Također, postupna integracija MPC-a - počevši s rasporedom više razine, a ne s kritičnim petljama u stvarnom vremenu - pomaže poljoprivrednicima da izgrade povjerenje.
Novi trendovi i usporedba s drugim tehnikama kontrole
Budući razvoj obećava poboljšanje uloge MPC-a u poljoprivredi. Jedan od trendova je MPC poboljšan umjetnom inteligencijom: strojno učenje može poboljšati modele ili ih čak zamijeniti (naučena dinamika) kako bi se uhvatilo složeno ponašanje biljaka. Hibridni pristupi kombiniraju fizikalne modele s neuronskim mrežama za veću točnost. Istraživači istražuju učenje s potkrepljenjem (RL) u kombinaciji s MPC-om (RL-MPC) za neke zadatke.
Integracija velikih podataka i oblaka: Kako farme prikupljaju više podataka (karte tla, višegodišnji prinosi), MPC kontroleri mogu iskoristiti dugoročne trendove. Platforme temeljene na oblaku mogu izvoditi zahtjevnu optimizaciju (dugi horizonti), dok rubni uređaji brže izvršavaju lokalni MPC. Digitalni blizanci postat će moćniji, omogućujući poljoprivrednicima simulaciju MPC strategija u budućim klimatskim scenarijima.
Napredak rubnog računarstva i interneta stvari: Novi mikrokontroleri i IoT čipovi sada mogu pokretati umjerene MPC rješavače na baterijsko napajanje. To znači da čak i mali automatizirani ventili za navodnjavanje ili traktori mogu imati ugrađene prediktivne kontrolere. Brže mreže (5G) i satelitski IoT (poput Starlinka ili specijaliziranih mreža širokog područja niske snage) čine protok podataka u stvarnom vremenu pouzdanijim.
Otpornost na klimatske promjene: S klimatskim promjenama, MPC može igrati ulogu u otpornosti. Na primjer, kontroleri mogu uključiti ciljeve ugljičnog ili vodnog otiska ili integrirati prognoze vremenskih ekstrema kako bi zaštitili usjeve. Autonomne farme - gdje je od sadnje do žetve potpuno automatizirano - su na vidiku; MPC (ili općenito optimizirano upravljanje) bit će središnji dio takvih sustava, koordinirajući robotske flote i tokove resursa.
U usporedbi s PID regulacijom, MPC nudi eksplicitno predviđanje i optimizaciju. PID petlja reagira na trenutnu pogrešku (npr. previše suho tlo pokreće navodnjavanje). MPC, nasuprot tome, predviđa gdje će se vlaga usmjeravati, vjetar, evapotranspiracija i planira zalijevanje unaprijed. PID može prekoračiti ili vibrirati pod ograničenjima, dok MPC poštuje ograničenja po dizajnu. MPC također izvorno obrađuje više ulaza/izlaza (MIMO), dok je PID inherentno jednostruka petlja (jedan senzor, jedan aktuator).
U usporedbi sa sustavima temeljenim na pravilima, MPC je fleksibilniji. Sustav pravila mogao bi reći “ako je vlaga < prag i nema prognoze kiše, navodnjavajte 10 jedinica.” MPC će umjesto toga optimizirati točan raspored navodnjavanja koji najbolje uravnotežuje buduću kišu, potrebe biljaka i troškove vode. MPC općenito daje bolje performanse u složenim, promjenjivim okruženjima. Nedostatak je što su pravila jednostavnija za implementaciju; MPC zahtijeva model i rješavač. Međutim, kod velikih ili visokovrijednih usjeva, prednosti MPC-a postaju značajne.
Alati, softver i platforme za prediktivno upravljanje modelom
Praktičari mogu izgraditi i testirati MPC pomoću raznih alata. Uobičajena simulacijska okruženja uključuju MATLAB/Simulink (s MPC Toolboxom) i Python biblioteke poput GEKKO, do-mpc ili CasADi za optimalno upravljanje. To omogućuje programerima stvaranje i podešavanje MPC modela u softveru. Za implementaciju, specijalizirani kontroleri ili PLC-ovi mogu pokretati MPC algoritme brzinom na terenu.
Što se tiče poljoprivredne tehnologije, neke IoT platforme i API-ji podržavaju MPC. Na primjer, pametni sustavi za navodnjavanje mogu korisnicima omogućiti prijenos prilagođenih algoritama upravljanja. Tvrtke poput John Deerea, Trimblea i mali startupi nude sustave za upravljanje farmama s prediktivnim značajkama (iako često vlasničkim). Okviri otvorenog koda (npr. FarmOS, OpenAg) omogućuju samostalnu integraciju MPC-a za hobiste i istraživače.
Komercijalne platforme za digitalne blizance i IoT (Azure FarmBeats, AWS IoT ili Googleov Sunrise) mogu hostirati MPC jezgru u oblaku dok rubni uređaji obrađuju senzore. Neki novi rubni AI čipovi i pametni senzori čak uključuju i mogućnosti optimizacije na vozilu. Poljoprivrednici mogu birati potpuna rješenja po principu "ključ u ruke" (npr. regulatori klime u staklenicima s ugrađenim MPC-om) ili kombinirati: koristiti MATLAB ili Python za početni dizajn, a zatim implementirati na uređajima koji koriste npr. FPGA-ove ili mikrokontrolere. Još uvijek ne dominira nijedan standard; područje se razvija. Mnogi praktičari počinju s otvorenim alatima (MATLAB ili Python) za simulaciju, a zatim ih prenose na robusniji hardver za rad na terenu.
Zaključak
Model Predictive Control spreman je igrati ključnu ulogu u budućnosti precizne poljoprivrede. Korištenjem modela i prognoza za optimizaciju poljoprivrednih aktivnosti, MPC pomaže farmama da učinkovitije koriste vodu, energiju i kemikalije, a istovremeno povećava prinose i kvalitetu proizvoda. Njegova sposobnost rukovanja višestrukim ulaznim podacima, ograničenjima i neizvjesnostima čini ga prikladnim za složene poljoprivredne sustave. Kako poljoprivreda postaje sve više tehnološki vođena, MPC pruža “mozak” za pametno donošenje odluka. U praksi, MPC-vođeni sustavi već su pokazali impresivne prednosti – uštedu energije u staklenicima, uštedu vode na poljima i niže troškove ulaganja.
Prednosti idu ruku pod ruku sa širim ciljevima održivosti. Analitičari primjećuju da nam precizne metode poput MPC-a omogućuju da “koristimo manje za uzgoj više”, smanjujući utjecaj poljoprivrede na okoliš. Iako izazovi ostaju (troškovi, modeliranje, podaci), kontinuirani napredak u umjetnoj inteligenciji, senzorima i računalstvu čini MPC dostupnijim. Ukratko, MPC je tehnologija koja omogućuje održivu, visokotehnološku poljoprivredu, pomažući poljoprivredi da zadovolji rastuću potražnju za hranom pod strožim ograničenjima. S kontinuiranim inovacijama i prihvaćanjem, potpuno autonomne farme – vođene prediktivnim kontrolerima – mogle bi biti sljedeći korak u preciznoj poljoprivredi.
Često postavljana pitanja (FAQs)
1. Što je MPC u jednostavnim riječima?
MPC je poput pametnog autopilota za poljoprivredu. Koristi model farme i prognoze (poput vremenskih) za planiranje radnji (navodnjavanje, hranjenje itd.) unaprijed. Umjesto da reagira samo na trenutne uvjete, “gleda unaprijed” na sljedeće sate ili dane i pronalazi najbolji plan za postizanje vaših ciljeva (npr. zdravih usjeva) uz korištenje minimalnih resursa.
2. Je li MPC skup za poljoprivrednike?
MPC zahtijeva tehnologiju (senzore, računala, softver), tako da postoje početni troškovi. Međutim, troškovi izračuna su pali, a jeftiniji IoT senzori su široko dostupni. Mnogi moderni traktori i oprema već dolaze opremljeni senzorima. Također, alati u oblaku i otvorenom kodu čine MPC pristupačnijim. Ključno je da povećana učinkovitost (manje vode, gnojiva, rasipanja energije) i veći prinosi mogu s vremenom vratiti investiciju.
3. Može li MPC raditi na malim farmama?
Da. MPC algoritmi mogu se skalirati na sustav bilo koje veličine. Mali staklenik ili vrt mogu koristiti jednostavnu MPC postavku (čak i prijenosno računalo ili Raspberry Pi). Mnoge aplikacije za daljinsko istraživanje omogućuju malim poljoprivrednicima da isprobaju odluke temeljene na modelu putem pametnog telefona. Ključno je uskladiti složenost sustava s veličinom farme. Malim farmama možda neće biti potrebni vrlo dugi horizonti ili ogromni modeli. Čak i osnovni MPC s jednim ili dva senzora može pomoći maloj farmi da postane učinkovitija.
4. Koliko su točni MPC modeli i predviđanja?
Točnost ovisi o kvaliteti podataka i dizajnu modela. Jednostavni linearni modeli mogu biti razumno točni za neke sustave. Složeniji modeli (poput neuronskih mreža) mogu uhvatiti nezgodno ponašanje biljaka ili tla. U praksi, MPC je dizajniran da bude robustan: redovito ponovno kalibrira planove na temelju novih mjerenja, pa čak i ako predviđanja nisu savršena, ispravlja se tijekom vremena. Pogreške modela i poremećaji obrađuju se povratnim informacijama. S dobrim senzorima i podešavanjem, moderni MPC može postići visoku točnost u zadacima upravljanja.