Miehittämättömät ilma-alukset (UAV) eli droonit mullistavat nykyaikaista maataloutta tarjoamalla nopeita ilmakuvia pelloista. Niitä käytetään viljelykasvien terveyden, kasvuvaiheen, tuholaisten, rikkaruohojen ja sadon arvioimiseen. Esimerkiksi Kiinassa on nyt käytössä yli 250 000 maatalousdroonia, ja Thaimaassa noin 301 300 000 maatalousmaata oli drooniruiskutuksen tai -seurannan piirissä vuoteen 2023 mennessä. Nämä droonit tehostavat viljelyä havaitsemalla nopeasti ongelmia (kuten tuholaisepidemioita tai vesistressiä), jotka voidaan jättää huomaamatta maan pinnalla.
Pienten miehittämättömien ilma-alusten sisäinen laskentateho ja akunkesto ovat kuitenkin hyvin rajalliset. Siksi monimutkaisten tekoälynäköalgoritmien suorittaminen niillä reaaliajassa on haasteellista. Perinteiset kevyet kohteiden tunnistusmallit (kuten pienet YOLO- tai MobileNet-pohjaiset ilmaisimet) voivat täyttää nämä tarpeet vain osittain: ne usein uhraavat tarkkuuden tai nopeuden ja vaativat merkittävää manuaalista säätöä. Tämä aukko motivoi käyttöönottotietoista Neural Architecture Search (NAS) -hakua: automatisoitua suunnittelumenetelmää, joka räätälöi syväoppimismalleja kenttäkäyttöön tarkoitettujen miehittämättömien ilma-alusten tarkkojen vaatimusten mukaisesti.
Nykyaikainen täsmäviljely käyttää miehittämättömiä ilma-aluksia (drooneja) peltojen kartoittamiseen ja sadon kunnon seurantaan. Lentämällä laajojen alueiden yli droonit voivat kerätä korkearesoluutioisia kuvia kasveista, maaperästä ja peltokuvioista. Nämä kuvat syötetään konenäköalgoritmeille, jotka havaitsevat rikkaruohoja kasvien joukossa, arvioivat satoa (esim. laskemalla hedelmiä tai tähkiä) tai havaitsevat varhaisia merkkejä taudeista tai ravinteiden puutteesta. Esimerkiksi droonit mahdollistavat kohdennetun rikkakasvien torjunta-aineiden ruiskuttamisen rikkaruoholaikkuihin, mikä vähentää kemikaalien käyttöä ja kustannuksia.
Droonien pienet tietokoneet (usein vain muutaman watin teholla) eivät kuitenkaan pysty ajamaan suuria neuroverkkoja lentonopeudella. Tämä vaikeuttaa reaaliaikaisen analyysin tekemistä: jos drone havaitsee ongelman, sen on reagoitava nopeasti tai kirjattava tiedot ennen akun tyhjentymistä. Nykyiset kevyet ilmaisimet (esim. YOLOv8 nano, YOLO-tiny, MobileNets) suunnitellaan käsin, ja niihin liittyy usein kompromisseja: mallin pienentäminen nopeuttaa sitä, mutta voi heikentää tarkkuutta.
Tämän seurauksena on suuri tarve menetelmille, jotka automaattisesti löytävät parhaan mahdollisen mallin miehittämättömän ilma-aluksen rajoitteet huomioon ottaen. Käyttöönottotietoinen NAS vastaa tähän tarpeeseen etsimällä neuroverkkoarkkitehtuureja, jotka yhdessä optimoivat havaitsemistarkkuuden ja resurssien käytön (latenssi, teho, muisti) todellisissa miehittämättömän ilma-aluksen olosuhteissa. Tämä lähestymistapa voi tuottaa erikoistuneita malleja, jotka toimivat tehokkaasti droonilaitteistossa ja pysyvät silti erittäin tarkkoina sadon seurantatehtävissä.
Miehittämättömien ilma-alusten kohteiden havaitsemisvaatimukset sadon seurannassa
Maatalouden miehittämättömät ilma-alukset suorittavat erilaisia visuaalisia havainnointitehtäviä, joilla jokaisella on omat vaatimuksensa:
1. Kasvin terveys ja stressin havaitseminen: Droonit käyttävät RGB-, lämpö- tai monispektrikameroita stressaantuneiden kasvien, ravinnepuutosten tai tautien oireiden tunnistamiseen. Reaaliaikaiset algoritmit voivat kartoittaa peltojen vaihtelua ja ohjata kastelua tai lannoitusta. Kasvien stressin merkkien tarkka havaitseminen mahdollistaa oikea-aikaiset toimenpiteet sadon säästämiseksi.
2. Rikkakasvien tunnistaminen: Rikkakasvien havaitseminen viljelykasvien joukossa antaa viljelijöille mahdollisuuden ruiskuttaa vain ei-toivottuja kasveja, mikä säästää rikkakasvien torjunta-aineita. Esimerkiksi puuvillapelloilla tehdyssä tutkimuksessa käytettiin miehittämättömän ilma-aluksen kuvia YOLOv7-pohjaisella ilmaisimella ja saavutettiin noin 83%:n tarkkuus rikkaruohojen erottamisessa puuvillasta. Silti visuaalisesti samankaltaisten rikkaruohojen ja viljelykasvien erottaminen on edelleen vaikeaa sekavissa peltokuvissa.

3. Tuholaisten ja tautien havaitseminen: Miehittämättömät ilma-alukset pystyvät havaitsemaan tartuntatapauksia (esim. heinäsirkat, hyönteiset tai sieniruton) aikaisemmin kuin jalan liikkuvat ihmiset. Droonit tukevat myös tuholaisten saastuttamien alueiden kartoittamista monispektrikuvantamisen avulla, joka parantaa pelkästään RGB-kuvantamista. Nopea ja tarkka tuholaisten havaitseminen on ratkaisevan tärkeää leviämisen estämiseksi.
4. Saantoarvio: Hedelmien, jyvien tähkien tai kasvien laskeminen ilmasta auttaa ennustamaan satomääriä. Mallit, jotka on koulutettu havaitsemaan omenoita, meloneja tai vehnän tähkiä miehittämättömien ilma-alusten kuvista, voivat nopeuttaa sadon arviointia. Esimerkiksi droonien kuvissa olevia neuroverkkoja on käytetty vesimeloni- ja melonisatojen laskemiseen pelloilla.
5. Maanmittaus ja kartoitus: Droonit luovat myös peltokarttoja (topografia, maaperän erot), jotka auttavat viljelyn suunnittelussa. Vaikka tämä ei olekaan varsinaista kohteiden havaitsemista, se on osa miehittämättömien ilma-alusten valvontaa.
Nämä tehtävät vaativat usein lähes reaaliaikaista päättelyä: peltojen yllä lentävän dronin on ehkä käsiteltävä videoruutuja lennossa (useita kuvia sekunnissa), jotta ohjauspäätökset (kuten korkeuden säätö tai ruiskun aktivointi) voidaan tehdä välittömästi. Muissa tapauksissa pienet viiveet (sekunteja) voivat olla hyväksyttäviä, jos tiedot kirjataan ja analysoidaan laskeutumisen jälkeen.
On tärkeää huomata, että miehittämättömien ilma-alusten näkökyvyn on käsiteltävä ympäristön vaihteluita: kirkasta auringonvaloa, varjoja, tuulen aiheuttamaa liikkeen epäterävyyttä, päällekkäisten lehtien peittymistä tai korkeuden ja kulman muutoksia. Kohteiden koot vaihtelevat (lähietäisyydellä olevat rikkaruohot vs. kaukaiset tuholaisryppäät), joten ilmaisimien on hallittava monitasoisia ominaisuuksia.
Lopuksi, maatalouden miehittämättömien ilma-alusten tehtävissä on tehtävä tiukkoja kompromisseja tarkkuuden, latenssin ja energian välillä. Korkea havaitsemistarkkuus on tarpeen, jotta rikkaruohoja tai tuholaisia ei havaita, mutta erittäin syvän verkon käyttö voi tyhjentää akun nopeasti. Havaitsemismallin on siksi oltava nopea ja energiatehokas, mutta silti riittävän tarkka tehtävään. Nämä tiukat vaatimukset korostavat, miksi maatalouden miehittämättömille ilma-aluksille tarvitaan erikoistunutta mallisuunnittelua.
Kevyet esineidenilmaisimet miehittämättömien ilma-alusten alustoille
Kevyet objektinilmaisimet ovat neuroverkkoja, jotka on erityisesti suunniteltu toimimaan rajoitetulla laitteistolla. Ne käyttävät usein pieniä runkoverkkoja (kuten MobileNet tai ShuffleNet), pienennettyjä kerrosleveyksiä tai yksinkertaistettuja kaula/pää-rakenteita. Esimerkiksi YOLO-perheen malleihin kuuluvat "nano"- ja "tiny"-versiot (esim. YOLOv8n, YOLOv5s), joissa on vähemmän parametreja ja jotka vaativat vähemmän operaatioita (FLOP).
Tällaiset ilmaisimet voivat toimia kymmenien kuvien sekunnissa nopeudella sulautetuissa laitteistoissa, kuten NVIDIA Jetson Nanossa tai Google Coralissa. Esimerkiksi Ag-YOLO oli räätälöity YOLO-pohjainen ilmaisin palmuviljelmille, joka toimi 36,5 fps:n nopeudella Intel Neural Compute Stick 2:lla (käyttäen vain 1,5 W) ja saavutti korkean tarkkuuden (F1 = 0,9205). Tämä malli käytti noin 12 kertaa vähemmän parametreja kuin YOLOv3-Tiny ja samalla kaksinkertaisti nopeudensa.

Nämä esimerkit havainnollistavat mallin suunnittelussa tarvittavia kompromisseja: mallin koon tai monimutkaisuuden pienentäminen (esim. vähemmän kerroksia tai kanavia) tyypillisesti nopeuttaa päättelyä ja vähentää energiankulutusta, mutta voi heikentää tarkkuutta. Ag-YOLO uhrasi jonkin verran kapasiteettia nopeuden ja tehokkuuden parantamiseksi, mutta säilytti silti korkean F1-pistemäärän 0,92 tehtävässään.
Vastaavasti kolmea YOLOv7-varianttia verrattiin rikkaruohojen havaitsemisessa: täysi YOLOv7 saavutti 83%:n tarkkuuden, kun taas pienemmän YOLOv7-w6-verkon tarkkuus laski 63%:hen. Tämä havainnollistaa geneeristen kevyiden ilmaisimien rajoitusta: yhteen ympäristöön tai kohdetyyppiin viritetyt mallit saattavat toimia heikommin toisessa. Nopeuden vuoksi kavennettu ilmaisin saattaa jättää huomaamatta hienovaraisia vihjeitä (esim. pieniä tai naamioituneita rikkaruohoja), mikä heikentää laitteen kestävyyttä vaihtelevissa olosuhteissa.
Maataloudessa nämä geneeriset kevyet verkot eivät välttämättä ole optimaalisia ilman lisäsäätöjä. Esimerkiksi yleisillä tietojoukoilla esikoulutettu YOLOv7-malli ei välttämättä käsittele täydellisesti viljelykuvien ainutlaatuisia tekstuureja ja mittakaavoja. Siksi malliarkkitehtuurin optimoinnille on tarvetta tehtävä- ja alustakohtaisesti. Manuaalinen viritys (tasojen, suodattimien jne. vaihtaminen) kullekin uudelle droonityypille tai viljelykasvilajikkeelle on työlästä. Tämä kannustaa automatisoituihin menetelmiin – kuten käyttöönottotietoisiin NAS-järjestelmiin – parhaan tasapainon löytämiseksi koon, tarkkuuden ja kestävyyden välillä tietylle miehittämättömän ilma-aluksen alustalle ja maataloussovellukselle.
Neuraalisten laitteiden arkkitehtuurihaku miehittämättömien ilma-alusten näköjärjestelmissä
Neural Architecture Search (NAS) on automatisoitu menetelmä neuroverkkoarkkitehtuurien suunnitteluun. Sen sijaan, että kerrosten, suodattimien ja yhteyksien määrä asetettaisiin manuaalisesti, NAS käyttää algoritmeja (vahvistusoppimista, evoluutiomenetelmiä tai gradienttipohjaista hakua) tutkiakseen mahdollisten suunnittelumallien avaruutta ja löytääkseen sellaisia, jotka optimoivat valitun tavoitteen (kuten tarkkuuden).
NAS-palvelimia on jo sovellettu mobiiliystävällisten verkkojen luomiseen. Esimerkiksi Googlen MnasNet oli uraauurtava "alustatietoinen" NAS, joka sisällytti suoraan todellisen laitteen latenssin tavoitteeseen. MnasNet mittasi päättelyaikaa Google Pixel -puhelimella kullekin ehdokasmallille haun aikana ja tasapainotti tarkkuuden tämän mitatun latenssin kanssa. Tuloksena oli CNN-verkkojen perhe, jotka olivat sekä nopeita että tarkkoja mobiililaitteistolla ja ylittivät ImageNetissä manuaalisesti suunnitellut MobileNet- ja NASNet-mallit.
Yleiset NAS-lähestymistavat, kuten MnasNet, keskittyvät kuitenkin yleisiin näkötehtäviin (ImageNet-luokittelu tai COCO-havaitseminen) ja yleiseen laitteistoon (esim. matkapuhelimet). Miehittämättömien ilmaisimien sadon seurannassa ongelma on erikoistuneempi. Haluamme ilmaisimia, jotka on optimoitu tietyille kohdeluokille (kasvit, rikkaruohot, tuholaiset) ja räätälöity miehittämättömän ilma-aluksen antureille ja lentoprofiilille. Tavallinen NAS, joka optimoi vain tarkkuuden tai yleisen latenssin, saattaa jättää huomiotta vivahteita, kuten pienten kohteiden havaitsemisen tai energiarajoitukset.
Perinteiset NAS-menetelmät voivat myös olla laskennallisesti erittäin kalliita (usein vaativat päiviä suurilla GPU-klustereilla), mikä ei ole aina käytännöllistä maataloustutkijoille. Siksi miehittämättömien ilma-alusten näköön tarvitaan tehtäväkohtaisia NAS-kehyksiä. Näiden on sisällettävä miehittämättömien ilma-alusten kannalta merkitykselliset kriteerit ja oltava mahdollisimman tehokkaita.
Kaikissa tapauksissa rajoitusten tiedostaminen on kriittistä: NAS-järjestelmän on oltava tietoinen kohdelaitteen rajoituksista (samanlainen kuin MnasNetissä) ja lennon aikana tehtävien miehittämättömien ilma-alusten tehtävien reaaliaikaisista vaatimuksista. Jos haku on liian hidasta tai jättää energiankulutuksen huomiotta, tuloksena oleva malli ei välttämättä toimi hyvin kentällä.
Käytännössä miehittämättömien lennokkien näköön tarkoitettu NAS sisällyttäisi laitteiston viiveen ja energian suoraan hakumetriikkaan. Voitaisiin esimerkiksi mitata ehdokasilmaisimen kuvanopeus todellisella droonitietokoneella (kuten NVIDIA Jetsonilla) ja käyttää sitä pistemääränä. Tämä on vastakohta yksinkertaisten välityspalvelimien, kuten FLOPien, käyttöön, jotka eivät kerää todellista nopeutta.
Näin tekemällä NAS voi löytää arkkitehtuureja, jotka parhaiten hyödyntävät laitteen ominaisuuksia. Yhteenvetona voidaan todeta, että NAS tarjoaa tavan suunnitella automaattisesti ilmaisimia miehittämättömille ilma-aluksille, mutta sitä on mukautettava ottamaan huomioon miehittämättömille ilma-aluksille ominaiset tehtävät ja tehokkuusvaatimukset.
Käyttöönottoa tukeva NAS: Keskeiset periaatteet
Käyttöönottotietoinen NAS laajentaa laitteistotietoista NAS-järjestelmää sisällyttämällä suunnitteluprosessiin käyttöönottokontekstin ja ympäristörajoitukset. Toisin sanoen se ottaa huomioon paitsi dronin laitteiston (suorittimen/näytönohjaimen nopeus, muistirajoitukset, energiabudjetti), myös sen, mitä drooni todellisuudessa kohtaa kentällä. Tämä tarkoittaa eksplisiittistä optimointia sellaisten mittareiden osalta kuin kohdelaitteen päättelylatenssi, virrankulutus ja muistin käyttö, samalla kun pyritään edelleen korkeaan tunnistustarkkuuteen.
Esimerkiksi NAS-alustalla voitaisiin ottaa käyttöön jokainen ehdokasmalli miehittämättömään ilma-alukseen kiinnitetyllä Jetson Nanolla ja tallentaa sen todellinen päättelyaika ja energiankulutus. Tämä empiirinen palaute auttaa ohjaamaan hakua kohti malleja, jotka todella täyttävät käyttöönottokriteerit.
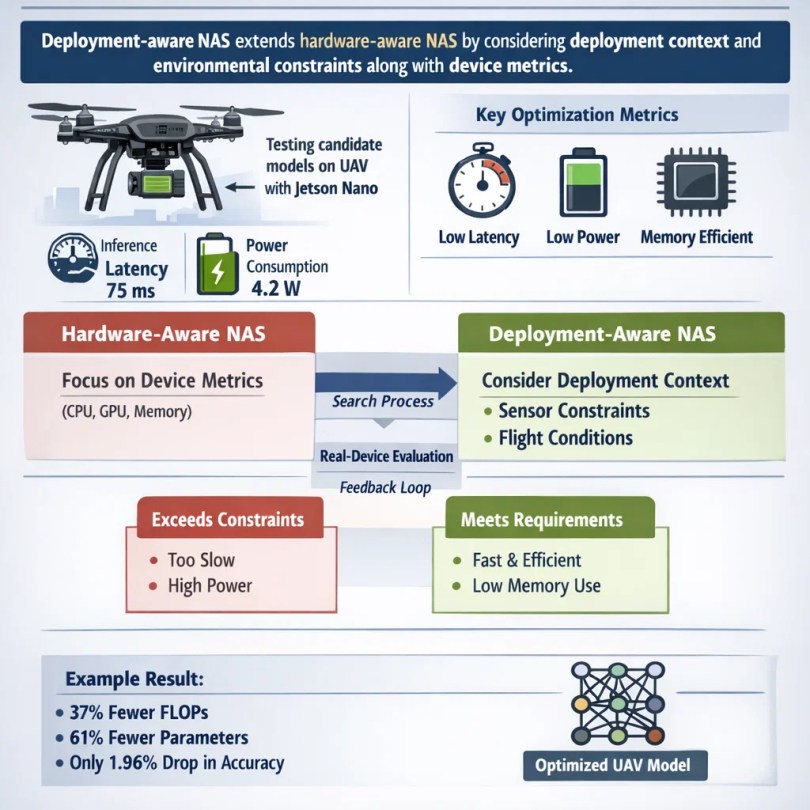
Laitteistotietoinen NAS (kuten MnasNet) keskittyy laitteen mittareihin, kun taas käyttöönottotietoinen NAS menee pidemmälle: se voi ottaa huomioon anturitulojen ominaisuudet (esim. kuvan resoluutio, monispektrikanavat) ja sovelluksen latenssitavoitteet (tarvittavat kuvat sekunnissa). Se voi jopa sisällyttää lentorajoituksia, kuten suurimman sallitun muistin, tai arviointeja simuloidun tuulen tärinän tai liikkeen epäterävyyden alla.
Käyttöönottotietoinen NAS saattaa rangaista arkkitehtuureja, jotka ylittävät esimerkiksi 5 W:n tehonkulutuksen tai jotka tarvitsevat enemmän muistia kuin dronella on. Näin tekemällä haku luonnollisesti painottuu käytännöllisiin malleihin miehittämättömän ilma-aluksen kenttätoiminnassa. Pohjimmiltaan käyttöönottotietoinen NAS pyrkii sulkemaan silmukan mallin suunnittelun ja todellisen käytön välillä. Sen sijaan, että arkkitehtuuri valittaisiin erikseen ja toivottaisiin sen toimivan, se sisältää systemaattisesti oikeiden laitteiden testauksen haun aikana.
Esimerkiksi Kerec ym. (2026) käyttivät tällaista viitekehystä miehittämättömän ilmaisimen (UAV) etsimiseen: he rakensivat YOLOv8n-peruslinjan päälle, mutta sisällyttivät etsintään Jetson Nanon latenssin ja energian. Tuloksena olevassa mallissa oli 37% vähemmän GFLOPeja ja 61% vähemmän parametreja kuin YOLOv8n:ssä, ja mAP:ssä oli vain 1,96% lasku. Tämä osoittaa selvästi, kuinka käyttöönottorajoitukset ohjasivat NAS:n paljon kevyempään ja nopeampaan verkkoon.
Käyttöönottotietoisen NAS-järjestelmän rooli täsmäviljelyn seurannassa
Käyttöönottotietoinen NAS voi parantaa huomattavasti miehittämättömien ilmaisimien sadon seurantaa räätälöimällä ilmaisimet maatalousolosuhteisiin. Esimerkiksi etsintä voi suosia arkkitehtuureja, jotka ovat hyviä pienten, ohuiden kohteiden (kuten kapeiden rikkaruohojen tai ohuiden maissintaimien) havaitsemisessa tai kasvien erottamisessa maaperän taustoista. Se voi säätää verkon syvyyttä ja vastaanottokenttiä tyypillisen lentokorkeuden mukaan: matalalla korkeudella kohteet täyttävät kuvan ja saattavat vaatia hienoja yksityiskohtia, kun taas korkealla verkon tulisi olla hyvä pienimuotoisessa havaitsemisessa. Käyttöönottotietoinen NAS voi koodata nämä vaatimukset hakutilaansa.
Nopeus on kriittistä kentällä. Kuvittele, että drone havaitsee tuholaisepidemian; jos malli on riittävän nopea käsittelemään videota esimerkiksi 30 fps:n nopeudella, se voi hälyttää lentäjän tai käynnistää välittömät hoitotoimenpiteet. Testeissä NAS:lla suunniteltu malli toimi Jetson Nanolla 28% nopeammin kuin tavallinen YOLOv8n optimoidun arkkitehtuurinsa ansiosta. Se kulutti myös 18,5% vähemmän energiaa ONNX-käyttöaikana, mikä tarkoittaa, että drone voi lentää pidempään samalla akulla. Nämä parannukset tekevät lennon aikaisesta päätöksenteosta helpompaa ja pidentävät tehtävän kestoa.
Toinen etu on kestävyys. Koska käyttöönottoa tukeva NAS sisältää laitteen todellisen arvioinnin, haku voi sisältää testejä vaihtelevissa olosuhteissa. Se voi esimerkiksi simuloida hämärää tai sisältää harjoituskuvia aamunkoitosta ja hämärästä varmistaen, että lopullinen ilmaisin säilyttää tarkkuuden todellisissa sää- ja valaistusmuutoksissa. Työ osoitti, että NAS:sta johdettu ilmaisin yleistyi hyvin: he testasivat sitä kahdella eri viljelykasviaineistolla (vehnäpät ja puuvillantaimet) ja havaitsivat vahvan suorituskyvyn molemmissa.

Tämä viittaa siihen, että käyttöönottoa tukevat NAS-järjestelmät auttoivat löytämään yleisiä, hyödyllisiä ominaisuuksia maataloudelle, mikä paransi yleistettävyyttä uusille pelloille. Kaiken kaikkiaan käyttöönottoa tukevat NAS-järjestelmät auttavat tasapainottamaan tarkkuutta ja pidempää lentoaikaa. Laskennan vähentämisen ansiosta droonit käyttävät vähemmän virtaa ja voivat kattaa suuremman alueen yhdellä akun latauksella, samalla kun ne havaitsevat sadot ja tuholaiset luotettavasti.
Maatalouden miehittämättömien ilmaisimien avaruussuunnittelun haku
Käyttöönottotietoisen NAS-järjestelmän tärkeä osa on hakuavaruus – joukko mahdollisia verkkorakenteita, joita se harkitsee. Miehittämättömien ilmaisimien sadonilmaisimien osalta hakuavaruus voidaan muokata siten, että se sisältää lupaavia arkkitehtuureja tälle alueelle. Keskeisiä osia ovat:
1. Selkärangan suunnittelu: Selkäranka on ominaisuuksien erotin. Miehittämättömien ilma-alusten tapauksessa voidaan käyttää kevyitä konvoluutiorakenteita, kuten syvyyssuunnassa erotettavia konvoluutioita (kuten MobileNetissä käytetään) tai käänteisiä jäännöslohkoja. Käänteiset residuaalit ja lineaariset pullonkaulat (MobileNetV2-tyyliin) ovat tunnettuja mobiilitehokkuudestaan. Hakuavaruus voisi mahdollistaa kunkin lohkon leveyden (kanavien lukumäärän) ja syvyyden vaihtelun miehittämättömän ilma-aluksen laskentabudjetin mukaan. Myös huomio- tai muuntajapohjaisia moduuleja voitaisiin käyttää, jos miehittämätön ilma-alus pystyy tarjoamaan niitä pienellä teholla.
2. Kaulan muotoilu: Monet objektinilmaisimet käyttävät ominaisuuspyramideja (FPN) tai polkujen yhdistämisverkkoja yhdistääkseen moniskaalaisia ominaisuuksia. Haussa voitaisiin tutkia yksinkertaistettuja FPN-verkkoja tai kevyttä ominaisuuksien yhdistämistä. Vaihtoehtoina voisivat olla esimerkiksi yksiskaalaisen pään käyttö verrattuna moniskaalaisiin päihin. Tila voi mahdollistaa kerrosten yhdistämisen tai yhteyksien ohittamisen, jotka auttavat havaitsemaan eri kokoisia kohteita.
3. Pään muotoilu: Myös tunnistuspäätä (luokittelu- ja laatikkoregressiokerrokset) voidaan vaihdella. Yhtenäisiä kenttiä etsiville miehittämättömille ilma-aluksille yksinkertaisempi pää saattaa riittää. Mutta pienten rikkaruohojen havaitsemiseksi haku voi sisältää ylimääräisiä konvoluutiokerroksia tai erilaisia ankkurointimenetelmiä.
4. Kevyet toiminnot: Hakuavaruus voi eksplisiittisesti sallia vain edulliset operaatiot. Esimerkiksi valinnan 3×3-konversion ja halvemman 1×3+3×1-faktoroitujen konversioiden välillä tai GhostNet-moduulien sisällyttämisen. Se voi myös sallia pienet ytimen koot tai pienemmät ulottuvuudet laskennan rajoittamiseksi. Kaikki nämä valinnat määräytyvät laitteiston mukaan. Avaruus voi kieltää kaikki tasokonfiguraatiot, jotka ylittävät dronin muistirajan tai odotetun energiakynnyksen.
Suunnittelemalla tätä hakutilaa huolellisesti NAS-prosessia ohjataan kohti tehokkaita ja toimivia arkkitehtuureja. Tuloksena saattaa olla uudenlainen lohkojen yhdistelmä, jota ei ole otettu huomioon standardimalleissa. Parhaiten löydetty ilmaisin käytti mukautettuja lohkovalintoja, jotka lyhensivät GFLOP-arvoja 37%:llä ja parametreja 61%:llä YOLOv8n:ään verrattuna.
Tämä oli mahdollista, koska NAS pystyi yhdistelemään runko- ja pääelementtejä miehittämättömien ilmaisimien asettamissa rajoissa. Yhteenvetona voidaan todeta, että maatalouden miehittämättömien ilmaisimien haku keskittyy skaalautuviin, kevyisiin rakennuspalikoihin ja moniskaalaiseen käsittelyyn, kaikki aluksen laitteiston rajoissa.
Optimointitavoitteet ja -rajoitukset
Käyttöönottotietoisten NAS-järjestelmien on tasapainoteltava useiden tavoitteiden kanssa. Ensisijainen tavoite on yleensä havaitsemistarkkuus (esim. keskimääräinen tarkkuus, mAP), mitattuna viljelykasvien seurantatietojoukoista. Esimerkiksi mAP@50 (tarkkuus 50% IOU:lla) on yleinen mittari. NAS-optimoidussa mallissa mAP@50 oli vain 1,96%:n lasku perus-YOLOv8n-malliin verrattuna, mikä on hyvin pieni menetys saavutettuihin parannuksiin nähden. Myös tarkkuus ja kattavuus (tai F1-pisteytys) avainluokissa (rikkaruohot, viljelykasvit) otetaan huomioon.
Samaan aikaan latenssi ja energia on optimoitava. Latenssi on kuvaa kohti kuluva päättelyaika; sulautetulla näytönohjaimella se voi olla 20–50 ms tai enemmän. Pienempi latenssi tarkoittaa suurempaa kuvataajuutta. Energiankulutus (joulea kuvaa kohden) on ratkaisevan tärkeää lennon kestävyyden kannalta. Muistin koko (parametrien määrä, mallin koko) on toinen rajoitus; mallien on mahduttava laitteen RAM-muistiin. Siksi NAS yleensä asettaa tavoitteen tai rangaistuksen näille rajoituksille.
Esimerkiksi mikä tahansa malli, joka on tiettyä kynnysarvoa hitaampi tai parametribudjetin yläpuolella, voidaan luokitella alemmaksi. Tämä tekee NAS:sta käytännössä monitavoitteisen optimointitehtävän: maksimoi tarkkuus ja minimoi latenssi, energiankulutus ja koko.
Käytännössä tämä voitaisiin tehdä painotetulla tavoitteiden summalla tai kovilla rajoituksilla. Jotkut menetelmät antavat suuren rangaistuksen kaikille ehdokkaille, jotka ylittävät miehittämättömän ilma-aluksen tehorajan. Toiset laskevat eksplisiittisesti energiamittarin: malleja testattiin ONNX-ajonaikaisella ympäristöllä "energiatehokkuuden" mittaamiseksi, ja paras malli oli +18,5% energiatehokkaampi kuin YOLOv8n. Tämä oli yksi heidän hakuaan ohjaavista tavoitteista.
Löydetyt kompromissit voidaan visualisoida Pareto-rajalla: toisessa päässä ovat erittäin nopeat pienet mallit, joiden tarkkuus on alhaisempi, ja toisessa päässä suuret ja tarkat mallit, jotka ovat liian hitaita tai paljon virtaa kuluttavia droonille. Käyttöönottotietoiset NAS-järjestelmät pyrkivät löytämään tältä raja-alueelta optimaalisen pisteen, joka vastaa todellisia tehtävän prioriteetteja (esim. pieni tarkkuuden menetys suurella kiihtyvyydellä). Yhteenvetona voidaan todeta, että NAS-järjestelmän on otettava huomioon tarkkuusmittarit (mAP, F1) ja päättelyrajoitukset (ms per frame, joulea per frame, muisti) yhdessä. Tämä tasapainoinen optimointi tekee mallista todella käyttöönottovalmiin miehittämättömien ilma-alusten käyttöön.
Koulutus ja arviointi realistisissa maatalousympäristöissä
Jotta NAS-löydökset toimisivat hyvin, ne on koulutettava ja testattava realistisilla maatalousdatoilla. Tämä tarkoittaa sellaisten tietojoukkojen käyttöä, jotka tallentavat todellisten peltojen vaihtelun: eri viljelykasvilajit, kasvuvaiheet, vuodenajat, valaistusolosuhteet ja korkeudet. Esimerkiksi pelkästään nuorten maissinversojen kuvilla kouluttaminen ei välttämättä yleisty kypsiin vehnätäihin. Peltoa edustavat tietojoukot varmistavat, että malli oppii tilalla tärkeät ominaisuudet. Koulutuksen aikana voidaan myös käyttää datan lisäystä (satunnaiset viljelykasvit, kirkkauden muutokset, liikkeen aiheuttama epäterävyys).

Arvioinnissa on tärkeää testata mallia mahdollisimman todellisissa olosuhteissa. Simulointityökalut voivat auttaa (esim. virtuaalisen dronin lentäminen 3D-kenttien yli), mutta oikeat lentotestit ovat kultainen standardi. Mallia verrataan ilma-aluksen laitteistoon. NAS-ajon jälkeen he ottivat ehdokkaan käyttöön Jetson Nanolla ja mittasivat 28.1% nopeamman päättelyn (verrattuna YOLOv8n-perustasoon) ja paremman energiankulutuksen. Tällainen reaaliaikaisten laitteiden palaute vahvistaa, että haku tuotti mallin, joka todella täyttää vaatimukset.
Myös yleistäminen on ratkaisevan tärkeää. Mallia voidaan hakea ja kouluttaa yhdellä viljelykasvilla (esimerkiksi vehnällä), mutta viljelijät tarvitsevat ilmaisimia, jotka toimivat eri pelloilla. Tutkimus osoitti vahvaa yleistämistä eri viljelykasvien välillä: yhteen tehtävään koulutettu NAS-pohjainen ilmaisin toimi edelleen hyvin eri viljelykasvien tietojoukolla (puuvillantaimet) ilman uudelleenkoulutusta. Tämä viittaa siihen, että käyttöönottotietoiset NAS-järjestelmät voivat tuottaa vankkoja arkkitehtuureja. Alueiden muutokset (esim. siirtyminen maissipelloilta hedelmätarhoille) saattavat kuitenkin vaatia hienosäätöä tai lisähakua. Myös eri vuodenaikojen testausta (kesä- vs. syksy -kuvat) suositellaan.
Lopuksi, jokainen uusi malli tulisi vertailla miehittämättömän ilma-aluksen (UAV) alustalla ennen käyttöönottoa. Tämä sisältää sen tarkkuuden ja nopeuden kirjaamisen droneihin, laitteiston ylikuumenemisen välttämisen ja virrankulutuksen tarkistamisen. Vasta sen jälkeen maanviljelijät voivat luottaa siihen kriittisen valvonnan osalta. Yhdistämällä kenttätyöhön liittyvän koulutuksen ja perusteellisen laitteistoarvioinnin käyttöönottotietoiset NAS-järjestelmät tuottavat ilmaisimia, jotka ovat paitsi teoreettisesti tehokkaita, myös kentällä todistettuja.
Edut manuaalisesti suunniteltuihin miehittämättömien ilmaisimien ilmaisimiin verrattuna
Käyttöönottotietoinen NAS tarjoaa useita selkeitä etuja perinteisiin, manuaalisesti suunniteltuihin miehittämättömien ilma-alusten malleihin verrattuna:
1. Paremman suorituskyvyn kompromissit: NAS-löydetyt mallit tarjoavat yleensä korkeampia tarkkuus-nopeus-energiatehokkuusyhdistelmiä. Esimerkiksi paras malli toimi 28% nopeammin ja käytti 18,5% vähemmän energiaa Jetson Nanolla kuin manuaalisesti valittu YOLOv8n-perusmalli, samalla kun se menetti vain ~2% havaitsemis-mAP:ssä. Tällaisen tasapainon saavuttaminen manuaalisesti olisi erittäin vaikeaa.
2. Parannettu yleistys: NAS:n löytämät mallit voivat olla paremmin sopeutettavissa uusiin olosuhteisiin, koska haku voi sisältää monipuolista dataa tai tavoitteita. Automaattisesti suunniteltu ilmaisin yleistyi hyvin eri viljelykasvien (vehnä ja puuvilla) ja valaistusolosuhteiden välillä. Tämä laaja luotettavuus on ratkaisevan tärkeää, kun lennot kohtaavat odottamattomia tilanteita.
3. Vähentynyt suunnittelutyö: NAS automatisoi paljon kokeilu- ja erehdysmenetelmää. Sen sijaan, että kerrosten kokoja säädettäisiin manuaalisesti ja testattaisiin useita ehdokkaita, käyttöönottotietoinen NAS tutkii iteratiivisesti vaihtoehtoja ja löytää sinulle parhaan rakenteen. Tämä säästää kehitysaikaa ja asiantuntemusta, mikä helpottaa ilmaisimien päivittämistä uusia tehtäviä tai laitteistoa varten.
4. Skaalautuvuus: Kun NAS-kehys on määritetty, sitä voidaan käyttää eri miehittämättömien ilma-alusten alustoilla tai tehtävissä. Esimerkiksi sama käyttöönottoa tukeva NAS voisi etsiä ilmaisinta, joka on viritetty eri kameran resoluutiolle tai droonimallille, yksinkertaisesti muuttamalla rajoitearvoja. Tämä on paljon skaalautuvampaa kuin verkkojen uudelleensuunnittelu alusta alkaen jokaista skenaariota varten.
Haasteet ja rajoitukset
Käyttöönottotietoinen NAS on tehokas, mutta ei mikään ihmelääke. Sitä on käytettävä harkiten ja tiedostaen sen resurssivaatimukset ja kohdeympäristön vaihtelevuus. Lupauksestaan huolimatta käyttöönottotietoisella NAS:lla on haasteita:
1. Korkeat hakukustannukset: NAS voi vaatia huomattavaa laskentatehoa. Tehokkaista algoritmeista huolimatta arkkitehtuuritilan etsiminen voi viedä paljon GPU-tunteja (tai erikoislaskentaa). Jos hakutyötä ei hallita huolellisesti, se voi olla joillekin tiimeille kohtuuttoman suuri.
2. Dataharha ja toimialueen siirtymä: NAS on vain niin hyvä kuin käytetyt tiedot. Jos harjoituskuvat eivät vastaa kenttäolosuhteita, löydetty arkkitehtuuri voi toimia heikommin todellisuudessa. Esimerkiksi yhdelle viljelykasvilajille tai yhdelle maantieteelliselle alueelle viritetty malli ei välttämättä siirry täydellisesti toiseen ilman lisäsovituksia.
3. Laitteiston heterogeenisuus: Miehittämättömien ilma-alusten laitteistoa on saatavilla monenlaisina (erilaisia sulautettuja näytönohjaimia, suorittimia ja FPGA-piirejä). Yhdelle emolevylle optimoitu malli ei välttämättä ole optimaalinen toiselle. Käyttöönottotietoisen NAS-järjestelmän on joko suoritettava haku uudelleen jokaiselle alustalle tai käytettävä kaikille sopivia konservatiivisia rajoituksia – mikä voi rajoittaa suorituskykyä.
4. Käytännön rajoitukset: Todellisiin maatalouskäyttöönottoihin liittyy ongelmia, kuten verkon päivitykset langattomasti, järjestelmän integrointi lennonohjaukseen ja turvallisuussertifiointi. Paraskin NAS-malli on integroitava täydelliseen droonijärjestelmään. Mallipäivitysten koordinointi, viranomaishyväksynnät ja viljelijöiden koulutus ovat ei-teknisiä esteitä.
Tulevaisuuden suunnat
Tulevaisuudessa mallinnus, anturitekniikka ja miehittämättömien ilma-alusten ohjaus integroidaan todennäköisesti entistä tiiviimmin. Käyttöönottotietoinen NAS on edelleen keskeinen työkalu tässä yhteissuunnitteluprosessissa. Tulevaisuutta ajatellen esiin nousee useita jännittäviä mahdollisuuksia:
1. Online- ja mukautuva NAS: Kertaluonteisen offline-haun sijaan tulevaisuuden järjestelmät saattavat säätää verkkoa reaaliajassa tai lentojen välillä. Esimerkiksi drone voisi aloittaa perusmallista ja kevyiden NAS-algoritmien avulla säätää itseään käsittelemään uusia valaistus- tai maasto-olosuhteita lennossa. Tämä "laitteella oleva NAS" on erittäin haastava, mutta se voisi parantaa huomattavasti sopeutumiskykyä.
2. Antureiden ja mallien yhteissuunnittelu: Tulevaisuuden täsmäviljelyjärjestelmät voisivat yhdessä optimoida kameran (RGB, monispektrinen, infrapuna) ja neuroverkon valinnan. Käyttöönottotietoinen NAS voisi laajentua siten, että se sisältäisi anturiparametrit (kuten käytetyt spektrikaistat) haussaan löytääkseen parhaan laitteiston ja mallin yhdistelmän.
3. Monispektrinen/hyperspektrinen integrointi: Kuten puuvillatautia koskeva tutkimus viittaa, monispektristen kuvien integrointi voi tehostaa havaitsemista, erityisesti varhaisvaiheen ongelmien osalta. Tulevaisuuden NAS voisi tutkia monivirtamalleja, jotka yhdistävät RGB- ja lähi-infrapunakanavia, jotta hienovaraisia kasvimuutoksia voidaan havaita luotettavammin.
4. Autonomiset päätöksentekoprosessit: Lopulta NAS-optimoidut ilmaisimet voivat tarjota täyden autonomian. Esimerkiksi drone voi automaattisesti luoda ruiskutussuunnitelman tai hälyttää tilanhoitajia, jos se havaitsee tiettyjä olosuhteita. Käyttöönottotietoista NAS-järjestelmää voitaisiin laajentaa päästä päähän -putkiin (havaitsemis- ja toimintamallit), mikä optimoi koko järjestelmän.
5. Eettiset ja ympäristöön liittyvät näkökohdat: Miehittämättömien ilma-alusten (UAV) kehittyessä meidän on otettava huomioon yksityisyys, ilmatilan turvallisuus ja vaikutukset maataloustyövoimaan (kuten Agrawal ja Arafat ovat todenneet). NAS-optimoitujen droonien vastuullisen käytön varmistaminen maataloudessa on tärkeä tulevaisuuden tavoite.
Johtopäätös
Käyttöönottotietoinen NAS edustaa tehokasta lähestymistapaa kevyiden objektinilmaisimien räätälöintiin miehittämättömien ilmaisimien (UAV) pohjaiseen sadonseurantaan. Upottamalla miehittämättömien ilmaisimien laitteiston ja tehtävärajoitukset hakuun se tuottaa malleja, jotka säästävät laskentaa ja energiaa tinkimättä tarkkuudesta. Esimerkiksi äskettäin tehdyssä tutkimuksessa osoitettiin, että NAS:n suunnittelema ilmaisin käytti 37% vähemmän FLOPeja ja 61% vähemmän parametreja kuin referenssi-YOLOv8n, mutta sen mAP laski vain noin 2%.
Todellisilla drone-laitteistoilla tämä tarkoitti 28%:n nopeampaa päättelyä ja 18%:n parempaa energiatehokkuutta. Tällaiset edut tarkoittavat pidempiä lentoaikoja, nopeampaa analyysia ja reagoivampaa maataloustukea. Verrattuna manuaalisesti luotuihin malleihin, käyttöönottotietoinen NAS tarjoaa paremman suorituskyvyn yleistyksen, vähemmän manuaalista säätötyötä ja skaalautuvuutta uusille miehittämättömien ilma-alusten alustoille.
Tarkkuusviljelyn yhteydessä nämä parannukset voivat tehdä miehittämättömien ilma-alusten sadon seurannasta käytännöllisempää ja tehokkaampaa. NAS-optimoiduilla ilmaisimilla varustetut droonit pystyvät havaitsemaan rikkaruohot, tuholaiset tai stressin luotettavammin, mikä mahdollistaa oikea-aikaiset toimenpiteet, jotka säästävät resursseja ja lisäävät satoja. Maatalouden jatkaessa droonien ja tekoälyn käyttöönottoa, käyttöönottotietoisilla NAS-järjestelmillä on keskeinen rooli sen varmistamisessa, että näissä droneissa toimivat mallit ovat tehokkaita, tarkkoja ja peltokäyttöön valmiita. Se kuroa umpeen kuilua huippuluokan neuroverkkotutkimuksen ja viljelijöiden käytännön tarpeiden välillä ja auttaa edistämään datalähtöisen täsmäviljelyn tulevaisuutta.