
Mägismaa oder, vastupidav teraviljakultuur, mida kasvatatakse Hiina Qinghai-Tiibeti platoo kõrgmäestikualadel, mängib olulist rolli kohaliku toiduga kindlustatuse ja majandusliku stabiilsuse tagamisel. Teaduslikult tuntud kui Harilik harilik L., see põllukultuur edeneb äärmuslikes tingimustes – hõre õhk, madal hapnikusisaldus ja keskmine aastatemperatuur 6,3 °C –, mistõttu on see asendamatu kogukondadele karmides keskkondades.
Hiinas, peamiselt Xizangi autonoomses piirkonnas, kasvatatakse mägismaa otra üle 270 000 hektari, moodustades seeläbi enam kui poole piirkonna istutusalast ja üle 701 000 000 hektari teravilja kogutoodangust. Odra tiheduse – taimede või võrsete arvu pindalaühiku kohta – täpne jälgimine on oluline põllumajandustavade, näiteks niisutamise ja väetamise, optimeerimiseks ning saagikuse prognoosimiseks.
Traditsioonilised meetodid, nagu käsitsi proovivõtt või satelliitpildistamine, on osutunud ebaefektiivseteks, töömahukateks või ebapiisavalt detailseteks. Nende probleemide lahendamiseks töötasid Fujiani Põllumajandus- ja Metsandusülikooli ning Chengdu Tehnikaülikooli teadlased välja uuendusliku tehisintellekti mudeli, mis põhineb tipptasemel objektide tuvastamise algoritmil YOLOv5.
Nende töö, mis avaldati Taimemeetodid (2025) saavutas tähelepanuväärseid tulemusi, sealhulgas keskmise täpsuse (mAP) 93,1% – mõõdik, mis mõõdab üldist tuvastustäpsust – ja arvutuskulude vähenemise 75,6% võrra, mis muutis selle sobivaks droonide reaalajas kasutuselevõtuks.
Põllukultuuride seire väljakutsed ja uuendused
Mägismaa odra tähtsus ulatub kaugemale selle rollist toiduallikana. Ainuüksi 2022. aastal koristati Rikaze linnas, mis on suur odrakasvatuspiirkond, 60 000 hektaril 408 900 tonni otra, mis moodustas peaaegu poole Tiibeti kogu teraviljatoodangust.
Vaatamata odra kultuurilisele ja majanduslikule tähtsusele on selle saagikuse hindamine pikka aega olnud keeruline. Traditsioonilised meetodid, näiteks käsitsi loendamine või satelliidipildid, on kas liiga töömahukad või neil puudub vajalik eraldusvõime üksikute odravõrsete – taime tera kandvate osade, mis on sageli vaid 2–3 sentimeetrit laiad – tuvastamiseks.
Käsitsi proovide võtmine nõuab põllumeestelt põlluosade füüsilist kontrollimist – see protsess on aeglane, subjektiivne ja suurte farmide jaoks ebapraktiline. Satelliidipildid, kuigi kasulikud laiaulatuslike vaatluste jaoks, on hädas madala eraldusvõimega (sageli 10–30 meetrit piksli kohta) ja sagedaste ilmastikuhäiretega, näiteks pilvkattega mägistes piirkondades nagu Tiibet.
Nende piirangute ületamiseks pöördusid teadlased mehitamata õhusõidukite (UAV) ehk droonide poole, mis on varustatud 20-megapiksliste kaameratega. Need droonid jäädvustasid Rikaze linna odrapõldudest 501 kõrglahutusega pilti kahes kriitilises kasvufaasis: kasvufaasis 2022. aasta augustis, mida iseloomustavad rohelised arenevad võrsed, ja küpsemisfaasis 2023. aasta augustis, mida iseloomustavad kuldkollased koristusvalmis võrsed.

Nende piltide analüüsimine tekitas aga väljakutseid, sealhulgas droonide liikumisest tingitud hägused servad, odravõrsete väiksus õhust vaadatuna ja kattuvad võrsed tihedalt istutatud põldudel.
Nende probleemide lahendamiseks eeltöötlesid teadlased pilte, jagades iga kõrge eraldusvõimega pildi 35 väiksemaks alampildiks ja filtreerides välja udused servad, mille tulemuseks oli 2970 kvaliteetset alampilti treenimiseks. See eeltöötlusetapp tagas, et mudel keskendus selgetele ja praktilistele andmetele, vältides madala kvaliteediga piirkondade segavaid tegureid.
Objektide tuvastamise tehnilised edusammud
Selle uuringu keskmes on YOLOv5 algoritm (You Only Look Once version 5), üheastmeline objektide tuvastamise mudel, mis on tuntud oma kiiruse ja modulaarse disaini poolest. Erinevalt vanematest kaheastmelistest mudelitest nagu Faster R-CNN, mis esmalt tuvastavad huvipakkuvad piirkonnad ja seejärel klassifitseerivad objektid, teostab YOLOv5 tuvastamise ühe läbimisega, muutes selle oluliselt kiiremaks.
Baasmudel YOLOv5n, millel oli 1,76 miljonit parameetrit (tehisintellekti mudeli konfigureeritavad komponendid) ja 4,1 miljardit FLOP-i (ujukomatehted, arvutusliku keerukuse mõõt), oli juba efektiivne. Kuid pisikeste, kattuvate odratäppide tuvastamine vajas edasist optimeerimist.
Uurimisrühm tutvustas mudelis kolme peamist täiustust: sügavuti eraldatav konvolutsioon (DSConv), varikujuline konvolutsioon (GhostConv) ja konvolutsiooniline plokkide tähelepanu moodul (CBAM).
Sügavuti eraldatav konvolutsioon (DSConv) vähendab arvutuskulusid, jagades standardse konvolutsiooniprotsessi – matemaatilise operatsiooni, mis eraldab piltidelt tunnuseid – kaheks etapiks. Esiteks rakendab sügavuskonvolutsioon filtreid üksikutele värvikanalitele (nt punane, roheline, sinine), analüüsides iga kanalit eraldi.
Sellele järgneb punktpõhine konvolutsioon, mis kombineerib tulemusi kanalite lõikes 1×1 tuumade abil. See lähenemisviis vähendab parameetrite arvu kuni 75% võrra.

Näiteks traditsiooniline 3×3 konvolutsioon 64 sisend- ja 128 väljundkanaliga nõuab 73 728 parameetrit, samas kui DSConv vähendab selle vaid 8768-ni – 88% vähendus. See efektiivsus on kriitilise tähtsusega mudelite juurutamiseks droonidele või piiratud töötlemisvõimsusega mobiilseadmetele.
GhostConvolutsioon (GhostConv) lihtsustab mudelit veelgi, genereerides täiendavaid tunnuskaarte – pildimustrite lihtsustatud esitusi – lihtsate lineaarsete toimingute, näiteks pööramise või skaleerimise abil, ressursimahukate konvolutsioonide asemel.
Traditsioonilised konvolutsioonikihid toodavad üleliigseid tunnuseid, raiskades arvutusressursse. GhostConv lahendab selle probleemi, luues olemasolevatest tunnustest "varjatud" tunnuseid, vähendades teatud kihtide parameetreid sisuliselt poole võrra.
Näiteks 64 sisend- ja 128 väljundkanaliga kiht nõuaks traditsiooniliselt 73 728 parameetrit, aga GhostConv vähendab selle väärtuseks 36,864 säilitades samal ajal täpsuse. See tehnika on eriti kasulik väikeste objektide, näiteks odrapõldude tuvastamiseks, kus arvutuslik efektiivsus on ülioluline.
Mudeli kriitiliste tunnuste esiletoomiseks isegi tihedas keskkonnas integreeriti konvolutsioonilise plokk-tähelepanu moodul (CBAM). Inimeste visuaalsetest süsteemidest inspireeritud tähelepanumehhanismid võimaldavad tehisintellekti mudelitel pildi olulisi osi tähtsuse järjekorda seada.
CBAM kasutab kahte tüüpi tähelepanu: kanalite tähelepanu, mis tuvastab olulised värvikanalid (nt roheline kasvavate okaste jaoks) ja ruumiline tähelepanu, mis tõstab esile pildil olevad võtmepiirkonnad (nt okaste klastrid). Asendades standardmoodulid DSConv ja GhostConv-iga ning kaasates CBAM-i, lõid teadlased lihtsustatud ja täpsema odra tuvastamiseks kohandatud mudeli.
Rakendamine ja tulemused
Mudeli treenimiseks sildistasid teadlased käsitsi 135 originaalpilti, kasutades piiravaid kaste – ristkülikukujulisi raame, mis tähistavad odravõrsete asukohta –, liigitades võrsed kasvu- ja küpsemisfaasidesse. Andmete täiendamise tehnikad – sealhulgas pööramine, mürasüst, oklusioon ja teravustamine – laiendasid andmestikku 2970 pildini, parandades mudeli üldistamisvõimet erinevates välitingimustes.
Näiteks piltide pööramine 90°, 180° või 270° võrra aitas mudelil tuvastada erinevate nurkade alt tulevaid naelu, lisades samal ajal müra, simuleerides reaalseid ebatäiusi, nagu tolm või varjud. Andmestik jagati treeningkomplektiks (80%) ja valideerimiskomplektiks (20%), tagades usaldusväärse hindamise.
Treening toimus suure jõudlusega süsteemis, millel oli AMD Ryzen 7 protsessor, NVIDIA RTX 4060 graafikakaart ja 64 GB muutmälu, kasutades PyTorchi raamistikku – populaarset süvaõppe tööriista. Hoolikalt jälgiti üle 300 treeningperioodi (andmestiku täielikud läbimised), mudeli täpsust (õigete tuvastamiste täpsus), meeldejäävust (võime leida kõik olulised piigid) ja kadusid (veamäär).
Tulemused olid rabavad. Täiustatud YOLOv5 mudel saavutas täpsuse 92,2% (võrreldes algtaseme 89,1%-ga) ja taasesitatavuse 86,2% (võrreldes algtaseme 83,1%-ga), edestades algtaseme YOLOv5n-i mõlemas mõõdikus 3,1% võrra. Selle keskmine täpsus (mAP) – terviklik mõõdik, mis keskmistab tuvastustäpsuse kõigis kategooriates – ulatus 93,1%-ni, kusjuures individuaalsed skoorid olid kasvufaasi piikide puhul 92,7% ja küpsusfaasi piikide puhul 93,5%.

Sama muljetavaldav oli ka selle arvutuslik efektiivsus: mudeli parameetrid langesid 70,6% võrra 1,2 miljonini ja FLOP-ide arv vähenes 75,6% võrra 3,1 miljardini. Võrdlusanalüüsid juhtivate mudelitega nagu Faster R-CNN ja YOLOv8n tõid esile selle paremuse.
Kuigi YOLOv8n saavutas veidi kõrgema mAP-i (93,8%), olid selle parameetrid (3,0 miljonit) ja FLOP-id (8,1 miljardit) vastavalt 2,5x ja 2,6x kõrgemad, muutes pakutud mudeli reaalajas rakenduste jaoks palju tõhusamaks.
Visuaalsed võrdlused rõhutasid neid edusamme. Kasvufaasi piltidel tuvastas täiustatud mudel 41 oga võrreldes algtaseme 28-ga. Küpsemise ajal tuvastas see 3 oga võrreldes algtaseme 2-ga, kusjuures vähem oli möödalaskmisi (tähistatud oranžide nooltega) ja valepositiivseid tulemusi (tähistatud lillade nooltega).
Need täiustused on üliolulised põllumeestele, kes tuginevad täpsetele andmetele saagikuse ennustamiseks ja ressursside optimeerimiseks. Näiteks võimaldab täpne viljapeade loendamine paremini hinnata teraviljatoodangut, mis annab teavet otsuste langetamiseks koristusaja, ladustamise ja turuplaneerimise kohta.
Tulevased suunad ja praktilised tagajärjed
Vaatamata edule tunnistas uuring ka selle piiranguid. Jõudlus langes äärmuslikes valgustingimustes, näiteks karmi keskpäevase pimestamise või tugevate varjude korral, mis võivad varjata ogade detaile. Lisaks ei sobinud ristkülikukujulised piiravad kastid mõnikord ebakorrapärase kujuga ogadele, mis tekitas väiksemaid ebatäpsusi.
Mudel välistas ka mehitamata õhusõidukite piltidelt udused servad, mis nõudis käsitsi eeltöötlust – etapp, mis lisab aega ja keerukust.
Edasine töö eesmärk on neid probleeme lahendada, laiendades andmestikku, et see hõlmaks koidikul, keskpäeval ja videvikus jäädvustatud pilte, katsetades hulknurga kujuga märkustega (paindlikud kujundid, mis sobivad paremini ebakorrapäraste objektidega) ja töötades välja algoritme, mis aitaksid uduseid piirkondi paremini käsitsi sekkumiseta käsitleda.
Sellel uuringul on sügavad tagajärjed. Selliste piirkondade nagu Tiibet põllumeestele pakub mudel reaalajas saagikuse hindamist, asendades töömahuka käsitsi loendamise droonipõhise automatiseerimisega. Kasvufaaside eristamine võimaldab täpset saagikoristust planeerida, vähendades enneaegsest või hilinenud koristamisest tulenevaid kahjusid.
Üksikasjalikud andmed võrsete tiheduse kohta – näiteks ala- või ülerahvastatud alade tuvastamine – võivad anda teavet niisutus- ja väetamisstrateegiate kohta, vähendades vee- ja kemikaalijäätmeid. Lisaks odrale on kergekaaluline arhitektuur paljulubav ka teiste põllukultuuride, näiteks nisu, riisi või puuviljade puhul, sillutades teed laiematele rakendustele täppispõllumajanduses.
Kokkuvõte
Kokkuvõtteks võib öelda, et see uuring näitab tehisintellekti transformatiivset potentsiaali põllumajanduslike väljakutsete lahendamisel. Täiustades YOLOv5 uuenduslike kergete tehnikatega, on teadlased loonud tööriista, mis tasakaalustab täpsuse ja tõhususe – see on kriitilise tähtsusega reaalseks rakendamiseks ressursipiiranguga keskkondades.
Sellised terminid nagu mAP, FLOP ja tähelepanumehhanismid võivad tunduda tehnilised, kuid nende mõju on sügavalt praktiline: need võimaldavad põllumeestel teha andmepõhiseid otsuseid, säästa ressursse ja maksimeerida saagikust. Kuna kliimamuutused ja rahvastiku kasv suurendavad survet ülemaailmsetele toidusüsteemidele, on sellised edusammud hädavajalikud.
Tiibeti ja kaugemate piirkondade põllumeeste jaoks ei tähenda see tehnoloogia mitte ainult põllumajandusliku efektiivsuse hüpet, vaid ka lootusekiirt jätkusuutliku toiduga kindlustatuse saavutamiseks ebakindlas tulevikus.
Viide: Cai, M., Deng, H., Cai, J. jt. Täiustatud YOLOv5-l põhinev kerge mägismaa odra tuvastamine. Plant Methods 21, 42 (2025). https://doi.org/10.1186/s13007-025-01353-0






























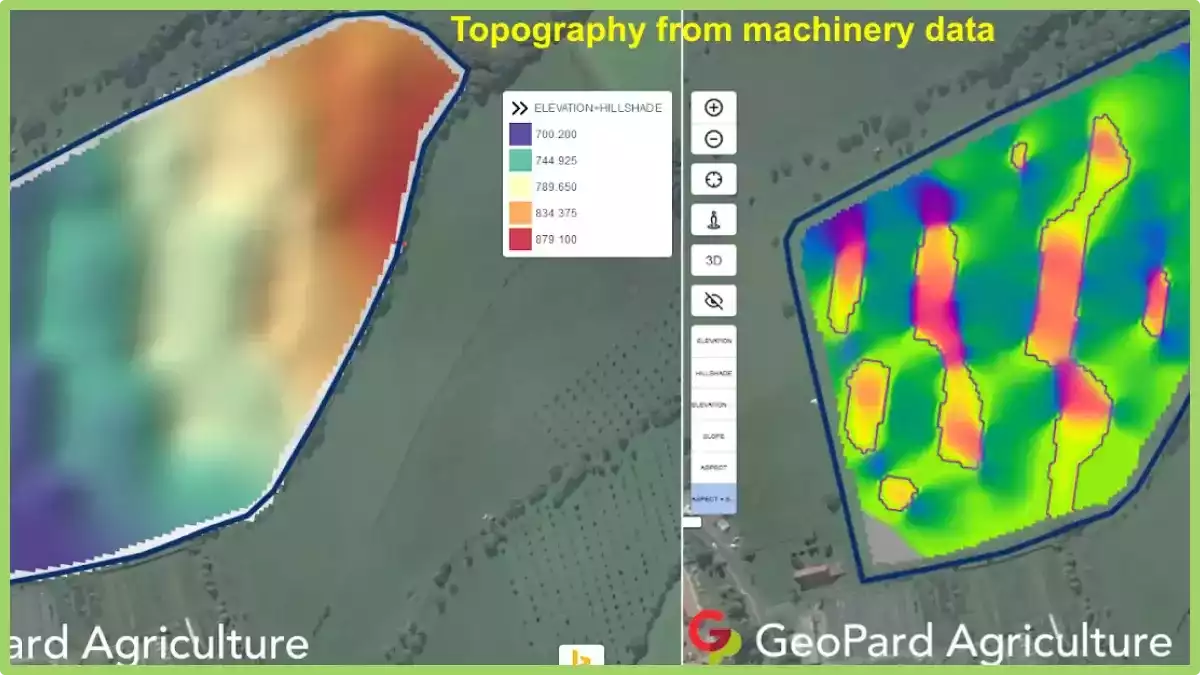
 Droonide kaardistamine toimib järgmiselt: drooni külge kinnitatakse andurid, näiteks kaamerad ja laserskannerid, mis lendavad üle ala, jäädvustades pilte või skaneerides seda laseritega erinevatel kõrgustel ja nurkade all. Kogutud andmed töödeldakse seejärel 3D-kaartideks, mida saab vaadata arvuti või nutitelefoni ekraanil.
Droonide kaardistamine toimib järgmiselt: drooni külge kinnitatakse andurid, näiteks kaamerad ja laserskannerid, mis lendavad üle ala, jäädvustades pilte või skaneerides seda laseritega erinevatel kõrgustel ja nurkade all. Kogutud andmed töödeldakse seejärel 3D-kaartideks, mida saab vaadata arvuti või nutitelefoni ekraanil.
 2. Drooniuuringuga väetiste, herbitsiidide ja pestitsiidide retseptikaardid
Ainult üks strateegia on aegunud, kuna see mitte ainult ei raiska ressursse, vaid võib mõjutada ka põllukultuuride tervist ja elujõudu. Näiteks liiga palju vett võib tappa muidu terve põllukultuuri, takistades selle juurtel hapniku omastamist, seega pole isegi kastmine parim viis veatu põllukultuuri kasvatamiseks. Sama kehtib ka väetiste kohta; õige koguse kasutamine on kasvu seisukohalt kriitilise tähtsusega, kuna liiga suure koguse kasutamine põhjustab juurte kõrbemist, mis võib hävitada muidu terveid taimi. Droonikaardistamine võimaldab pritsida pihustust ainult seal, kus probleem on, vähendades ressursside raiskamist ja tervete põllukultuuride kahjustamise ohtu, mis ei vaja sama töötlemist. Kuigi inimesed ei suudaks oma põllukultuuris iga taime ainulaadseid vajadusi ära tunda, saab drooniuuringute tehnoloogia seda teha minutitega.
3. Saagi hindamine
Nupuvajutusega käivitatakse luuremissioonid; droon lahkub ilmastikukindlast laadimisjaamast, kogub andmeid ja laadib need üles. Drooni tulemusi, samuti taimede stressi tuvastamise uuringut ja olemasolevate töötluste või muudatuste tõhusust saab kasutada automatiseeritud niisutussüsteemide kohandamiseks. Kohapealsete luuredroonidega on võimalik teha pidevaid tervisekontrolle.
4. Taimepopulatsioonide loendamine
Drooni võimsa tehisintellekti tehnoloogia abil saab tuvastada mis tahes taimesorti. See võimaldab iga hooaja alguses ja lõpus kindlaks määrata kogu saagi ja kogukadu, suurendades täpsust ja teadlikkust kasvuperioodi edukusest.
5. Automaatne klassifitseerimine droonide pildistamise abil
Drooni pildid näitavad, millise põllumajandusmaa kohal see lendab – kas see on haritav, karjamaa või segamaa. Droonid võivad lugeda põllukultuuride ja kariloomade arvu, nagu eespool näidatud, et kontrollida andmete ajakohasust ja kõigi kadude registreerimist.
6. Põllukultuuride jälgimine
Saagi tervis ei ole ette määratud, sest keskkonnategurid võivad arengut mõjutada. Arvesse tuleb võtta temperatuuri, niiskust, toitainete ja mikroelementide sisaldust, putukate ja haiguste esinemist, vee kättesaadavust ja päikese käes viibimise hulka. Kõiki neid saab jälgida droonide erineva koormuse abil ja paljusid neist immateriaalsetest muutujatest saab hallata, kandes vett või pihustades otse vajalikele piirkondadele. Mida tervem on saagi ümbrus, seda tugevamaks muutub selle immuunsüsteem ja seega ka tervemaks muutub see – palju parema võimega kahjureid ja haigusi tõrjuda.
2. Drooniuuringuga väetiste, herbitsiidide ja pestitsiidide retseptikaardid
Ainult üks strateegia on aegunud, kuna see mitte ainult ei raiska ressursse, vaid võib mõjutada ka põllukultuuride tervist ja elujõudu. Näiteks liiga palju vett võib tappa muidu terve põllukultuuri, takistades selle juurtel hapniku omastamist, seega pole isegi kastmine parim viis veatu põllukultuuri kasvatamiseks. Sama kehtib ka väetiste kohta; õige koguse kasutamine on kasvu seisukohalt kriitilise tähtsusega, kuna liiga suure koguse kasutamine põhjustab juurte kõrbemist, mis võib hävitada muidu terveid taimi. Droonikaardistamine võimaldab pritsida pihustust ainult seal, kus probleem on, vähendades ressursside raiskamist ja tervete põllukultuuride kahjustamise ohtu, mis ei vaja sama töötlemist. Kuigi inimesed ei suudaks oma põllukultuuris iga taime ainulaadseid vajadusi ära tunda, saab drooniuuringute tehnoloogia seda teha minutitega.
3. Saagi hindamine
Nupuvajutusega käivitatakse luuremissioonid; droon lahkub ilmastikukindlast laadimisjaamast, kogub andmeid ja laadib need üles. Drooni tulemusi, samuti taimede stressi tuvastamise uuringut ja olemasolevate töötluste või muudatuste tõhusust saab kasutada automatiseeritud niisutussüsteemide kohandamiseks. Kohapealsete luuredroonidega on võimalik teha pidevaid tervisekontrolle.
4. Taimepopulatsioonide loendamine
Drooni võimsa tehisintellekti tehnoloogia abil saab tuvastada mis tahes taimesorti. See võimaldab iga hooaja alguses ja lõpus kindlaks määrata kogu saagi ja kogukadu, suurendades täpsust ja teadlikkust kasvuperioodi edukusest.
5. Automaatne klassifitseerimine droonide pildistamise abil
Drooni pildid näitavad, millise põllumajandusmaa kohal see lendab – kas see on haritav, karjamaa või segamaa. Droonid võivad lugeda põllukultuuride ja kariloomade arvu, nagu eespool näidatud, et kontrollida andmete ajakohasust ja kõigi kadude registreerimist.
6. Põllukultuuride jälgimine
Saagi tervis ei ole ette määratud, sest keskkonnategurid võivad arengut mõjutada. Arvesse tuleb võtta temperatuuri, niiskust, toitainete ja mikroelementide sisaldust, putukate ja haiguste esinemist, vee kättesaadavust ja päikese käes viibimise hulka. Kõiki neid saab jälgida droonide erineva koormuse abil ja paljusid neist immateriaalsetest muutujatest saab hallata, kandes vett või pihustades otse vajalikele piirkondadele. Mida tervem on saagi ümbrus, seda tugevamaks muutub selle immuunsüsteem ja seega ka tervemaks muutub see – palju parema võimega kahjureid ja haigusi tõrjuda.