
Vysokohorský jačmeň, odolná obilnina pestovaná vo vysokohorských oblastiach čínskej náhornej plošiny Qinghai-Tibet, zohráva kľúčovú úlohu v miestnej potravinovej bezpečnosti a hospodárskej stabilite. Vedecky je známy ako Hordeum vulgare L., tejto plodine sa darí v extrémnych podmienkach - v riedkom vzduchu, pri nízkej hladine kyslíka a priemernej ročnej teplote 6,3 °C, čo ju robí nepostrádateľnou pre spoločenstvá v drsných podmienkach.
S viac ako 270 000 hektármi určenými na jeho pestovanie v Číne, predovšetkým v autonómnej oblasti Xizang, predstavuje vysokohorský jačmeň viac ako polovicu osiatej plochy regiónu a viac ako 70% jeho celkovej produkcie obilnín. Presné monitorovanie hustoty jačmeňa - počtu rastlín alebo kláskov na jednotku plochy - je nevyhnutné na optimalizáciu poľnohospodárskych postupov, ako je zavlažovanie a hnojenie, a na predpovedanie výnosov.
Tradičné metódy, ako napríklad manuálny odber vzoriek alebo satelitné snímkovanie, sa však ukázali ako neefektívne, prácne alebo nedostatočne podrobné. Na riešenie týchto problémov vyvinuli výskumníci z Fujian Agriculture and Forestry University a Chengdu University of Technology inovatívny model umelej inteligencie založený na YOLOv5, špičkovom algoritme na detekciu objektov.
Ich práca, publikovaná v Rastlinné metódy (2025), dosiahol pozoruhodné výsledky vrátane 93,1% priemernej presnosti (mAP) - metriky merajúcej celkovú presnosť detekcie - a 75,6% zníženia výpočtových nákladov, vďaka čomu je vhodný na nasadenie dronov v reálnom čase.
Výzvy a inovácie v oblasti monitorovania plodín
Význam vysokohorského jačmeňa presahuje jeho úlohu ako zdroja potravy. Len v roku 2022 sa v meste Rikaze, hlavnom regióne produkcie jačmeňa, zozbieralo 408 900 ton jačmeňa na 60 000 hektároch, čo predstavuje takmer polovicu celkovej produkcie obilia v Tibete.
Napriek kultúrnemu a hospodárskemu významu jačmeňa je odhad jeho výnosov dlhodobo náročný. Tradičné metódy, ako napríklad ručné počítanie alebo satelitné snímky, sú buď príliš náročné na prácu, alebo nemajú dostatočné rozlíšenie potrebné na zistenie jednotlivých kláskov jačmeňa - časti rastliny, ktorá nesie zrno a ktorá je často široká len 2 - 3 cm.
Manuálny odber vzoriek si vyžaduje, aby poľnohospodári fyzicky kontrolovali časti poľa - tento proces je pomalý, subjektívny a pre veľké farmy nepraktický. Satelitné snímky sú síce užitočné na rozsiahle pozorovania, ale majú nízke rozlíšenie (často 10 - 30 metrov na pixel) a časté poruchy počasia, ako napríklad oblačnosť v horských oblastiach, ako je Tibet.
Na prekonanie týchto obmedzení sa výskumníci zamerali na bezpilotné lietadlá (UAV) alebo drony vybavené 20-megapixelovými kamerami. Tieto bezpilotné lietadlá zachytili 501 snímok polí s vysokým rozlíšením v meste Rikaze počas dvoch kritických fáz rastu: fázy rastu v auguste 2022, ktorá sa vyznačuje zelenými vyvíjajúcimi sa kláskami, a fázy dozrievania v auguste 2023, ktorá sa vyznačuje zlatožltými kláskami pripravenými na zber.

Analýza týchto snímok však priniesla problémy vrátane rozmazaných okrajov spôsobených pohybom dronu, malej veľkosti jačmenných kláskov v leteckých záberoch a prekrývajúcich sa kláskov na husto osiatych poliach.
Na vyriešenie týchto problémov výskumníci predspracovali obrázky rozdelením každého obrázka s vysokým rozlíšením na 35 menších čiastkových obrázkov a odfiltrovaním rozmazaných hrán, čím získali 2 970 vysokokvalitných čiastkových obrázkov na trénovanie. Tento krok predspracovania zabezpečil, že model sa sústredil na jasné, použiteľné údaje a vyhol sa rušivým vplyvom z nekvalitných oblastí.
Technický pokrok v detekcii objektov
Ústredným prvkom tohto výskumu je algoritmus YOLOv5 (You Only Look Once version 5), jednostupňový model detekcie objektov známy svojou rýchlosťou a modulárnym dizajnom. Na rozdiel od starších dvojstupňových modelov, ako je napríklad Faster R-CNN, ktoré najprv identifikujú oblasti záujmu a potom klasifikujú objekty, YOLOv5 vykonáva detekciu v jednom prechode, vďaka čomu je výrazne rýchlejší.
Už základný model YOLOv5n s 1,76 milióna parametrov (konfigurovateľné komponenty modelu umelej inteligencie) a 4,1 miliardy FLOP (operácie s pohyblivou rádovou čiarkou, meradlo výpočtovej zložitosti) bol efektívny. Detekcia drobných, prekrývajúcich sa jačmenných hrotov si však vyžadovala ďalšiu optimalizáciu.
Výskumný tím zaviedol tri kľúčové vylepšenia modelu: hĺbkovo oddeliteľnú konvolúciu (DSConv), konvolúciu duchov (GhostConv) a konvolučný modul blokovej pozornosti (CBAM).
Hĺbkovo oddeliteľná konvolúcia (DSConv) znižuje výpočtové náklady rozdelením štandardného procesu konvolúcie - matematickej operácie, ktorá extrahuje prvky z obrázkov - na dva kroky. Najprv sa pri hĺbkovej konvolúcii použijú filtre na jednotlivé farebné kanály (napr. červený, zelený, modrý) a každý kanál sa analyzuje samostatne.
Potom nasleduje bodová konvolúcia, ktorá kombinuje výsledky naprieč kanálmi pomocou jadier 1×1. Tento prístup znižuje počet parametrov až o 75%.

Napríklad tradičná konvolúcia 3×3 so 64 vstupnými a 128 výstupnými kanálmi vyžaduje 73 728 parametrov, zatiaľ čo DSConv ich znižuje na 8 768 - čo predstavuje zníženie o 88%. Táto efektivita je rozhodujúca pri nasadzovaní modelov na bezpilotných lietadlách alebo mobilných zariadeniach s obmedzeným výkonom spracovania.
Konvolúcia duchov (GhostConv) ďalej odľahčuje model tým, že namiesto konvolúcií náročných na zdroje generuje ďalšie mapy príznakov - zjednodušené reprezentácie obrazových vzorov - prostredníctvom jednoduchých lineárnych operácií, ako je rotácia alebo škálovanie.
Tradičné konvolučné vrstvy vytvárajú nadbytočné funkcie, čím sa plytvajú výpočtové zdroje. GhostConv to rieši vytváraním “duchovných” funkcií z existujúcich funkcií, čím sa parametre v určitých vrstvách znižujú na polovicu.
Napríklad vrstva so 64 vstupnými a 128 výstupnými kanálmi by tradične vyžadovala 73 728 parametrov, ale GhostConv to redukuje na 36,864 pri zachovaní presnosti. Táto technika je obzvlášť užitočná pri detekcii malých objektov, ako sú napríklad jačmenné klásky, kde je najdôležitejšia efektivita výpočtu.
Konvolučný blokový modul pozornosti (CBAM) bol integrovaný, aby pomohol modelu zamerať sa na kritické prvky aj v neprehľadnom prostredí. Mechanizmy pozornosti inšpirované ľudskými vizuálnymi systémami umožňujú modelom umelej inteligencie uprednostňovať dôležité časti obrazu.
CBAM využíva dva typy pozornosti: kanálovú pozornosť, ktorá identifikuje dôležité farebné kanály (napr. zelenú pre rastúce hroty), a priestorovú pozornosť, ktorá zvýrazňuje kľúčové oblasti v obraze (napr. zhluky hrotov). Výskumníci nahradením štandardných modulov DSConv a GhostConv a začlenením CBAM vytvorili štíhlejší a presnejší model prispôsobený na detekciu jačmeňa.
Implementácia a výsledky
Na vyškolenie modelu výskumníci manuálne označili 135 pôvodných snímok pomocou ohraničujúcich rámčekov - obdĺžnikových rámčekov označujúcich umiestnenie kláskov jačmeňa - a rozdelili klásky do štádií rastu a dozrievania. Techniky rozšírenia údajov - vrátane rotácie, vnášania šumu, oklúzie a doostrenia - rozšírili súbor údajov na 2 970 obrázkov, čím sa zlepšila schopnosť modelu zovšeobecniť sa v rôznych poľných podmienkach.
Napríklad otáčanie obrázkov o 90°, 180° alebo 270° pomohlo modelu rozpoznať hroty z rôznych uhlov, zatiaľ čo pridanie šumu simulovalo nedokonalosti reálneho sveta, ako je prach alebo tiene. Súbor údajov bol rozdelený na tréningový súbor (80%) a validačný súbor (20%), čím sa zabezpečilo spoľahlivé vyhodnotenie.
Trénovanie prebiehalo na výkonnom systéme s procesorom AMD Ryzen 7, grafickým procesorom NVIDIA RTX 4060 a 64 GB RAM pomocou frameworku PyTorch - populárneho nástroja na hlboké učenie. Počas 300 tréningových epoch (kompletných prechodov súborom údajov) sa starostlivo sledovala presnosť modelu (presnosť správnych detekcií), odvolanie (schopnosť nájsť všetky relevantné hroty) a strata (chybovosť).
Výsledky boli zarážajúce. Vylepšený model YOLOv5 dosiahol presnosť 92,2% (oproti 89,1% v základnom modeli) a odvolanie 86,2% (oproti 83,1%), čím v oboch ukazovateľoch prekonal základný model YOLOv5n o 3,1%. Jeho priemerná presnosť (mAP) - komplexná metrika, ktorá spriemeruje presnosť detekcie vo všetkých kategóriách - dosiahla 93,1%, pričom jednotlivé výsledky boli 92,7% pre hroty v štádiu rastu a 93,5% pre hroty v štádiu dozrievania.

Rovnako pôsobivá bola aj jeho výpočtová účinnosť: parametre modelu klesli o 70,6% na 1,2 milióna a počet FLOP sa znížil o 75,6% na 3,1 miliardy. Porovnávacie analýzy s poprednými modelmi, ako sú Faster R-CNN a YOLOv8n, zdôraznili jeho nadradenosť.
Hoci YOLOv8n dosiahol o niečo vyššiu mAP (93,8%), jeho parametre (3,0 milióna) a FLOP (8,1 miliardy) boli 2,5-krát, resp. 2,6-krát vyššie, čím sa navrhovaný model stal oveľa efektívnejším pre aplikácie v reálnom čase.
Vizuálne porovnania zdôraznili tieto pokroky. Na obrázkoch v rastovom štádiu zlepšený model detekoval 41 hrotov v porovnaní so základným modelom s 28 hrotmi. Počas dozrievania identifikoval 3 hroty v porovnaní so základným modelom, ktorý mal 2 hroty, s menším počtom vynechaných detekcií (označené oranžovými šípkami) a falošne pozitívnych detekcií (označené fialovými šípkami).
Tieto zlepšenia sú pre poľnohospodárov, ktorí sa spoliehajú na presné údaje pri predpovedaní výnosov a optimalizácii zdrojov, veľmi dôležité. Presné počítanie kláskov napríklad umožňuje lepšie odhady produkcie zrna, ktoré sú základom pre rozhodnutia o načasovaní zberu, skladovaní a plánovaní trhu.
Budúce smerovanie a praktické dôsledky
Napriek svojmu úspechu štúdia priznala obmedzenia. Výkonnosť sa znížila pri extrémnych svetelných podmienkach, ako je prudké poludňajšie oslnenie alebo silné tiene, ktoré môžu zakryť detaily hrotu. Okrem toho obdĺžnikové ohraničenia niekedy nezodpovedali nepravidelným tvarom hrotov, čo spôsobovalo drobné nepresnosti.
Model tiež vylúčil rozmazané hrany zo snímok UAV, čo si vyžadovalo manuálne predspracovanie - krok, ktorý zvyšuje časovú náročnosť a zložitosť.
Cieľom budúcej práce je vyriešiť tieto problémy rozšírením súboru údajov o snímky zachytené na úsvite, na poludnie a za súmraku, experimentovaním s anotáciami v tvare polygónov (flexibilné tvary, ktoré lepšie vyhovujú nepravidelným objektom) a vývojom algoritmov na lepšie spracovanie rozmazaných oblastí bez manuálneho zásahu.
Dôsledky tohto výskumu sú hlboké. Pre poľnohospodárov v regiónoch, ako je Tibet, model ponúka odhad výnosov v reálnom čase, čím nahrádza prácne manuálne počítanie automatizáciou založenou na dronoch. Rozlišovanie medzi jednotlivými fázami rastu umožňuje presné plánovanie zberu, čím sa znižujú straty spôsobené predčasným alebo oneskoreným zberom.
Podrobné údaje o hustote bodliakov - ako napríklad identifikácia nedostatočne osídlených alebo preplnených oblastí - môžu byť podkladom pre stratégie zavlažovania a hnojenia, čím sa zníži plytvanie vodou a chemikáliami. Okrem jačmeňa je ľahká architektúra sľubná aj pre iné plodiny, ako je pšenica, ryža alebo ovocie, čo otvára cestu k širšiemu využitiu v presnom poľnohospodárstve.
Záver
Na záver možno konštatovať, že táto štúdia je príkladom transformačného potenciálu umelej inteligencie pri riešení poľnohospodárskych výziev. Zdokonalením YOLOv5 pomocou inovatívnych odľahčených techník výskumníci vytvorili nástroj, ktorý vyvažuje presnosť a efektívnosť - čo je kritické pre reálne nasadenie v prostredí s obmedzenými zdrojmi.
Pojmy ako mAP, FLOP a mechanizmy pozornosti sa môžu zdať technické, ale ich vplyv je hlboko praktický: umožňujú poľnohospodárom prijímať rozhodnutia založené na údajoch, šetriť zdroje a maximalizovať výnosy. Keďže klimatické zmeny a rast populácie zvyšujú tlak na globálne potravinové systémy, takéto pokroky budú nevyhnutné.
Pre tibetských a ďalších poľnohospodárov predstavuje táto technológia nielen skok v efektívnosti poľnohospodárstva, ale aj svetielko nádeje na udržateľnú potravinovú bezpečnosť v neistej budúcnosti.
Odkaz: Cai, M., Deng, H., Cai, J. et al. Lightweight highland barley detection based on improved YOLOv5. Plant Methods 21, 42 (2025). https://doi.org/10.1186/s13007-025-01353-0






























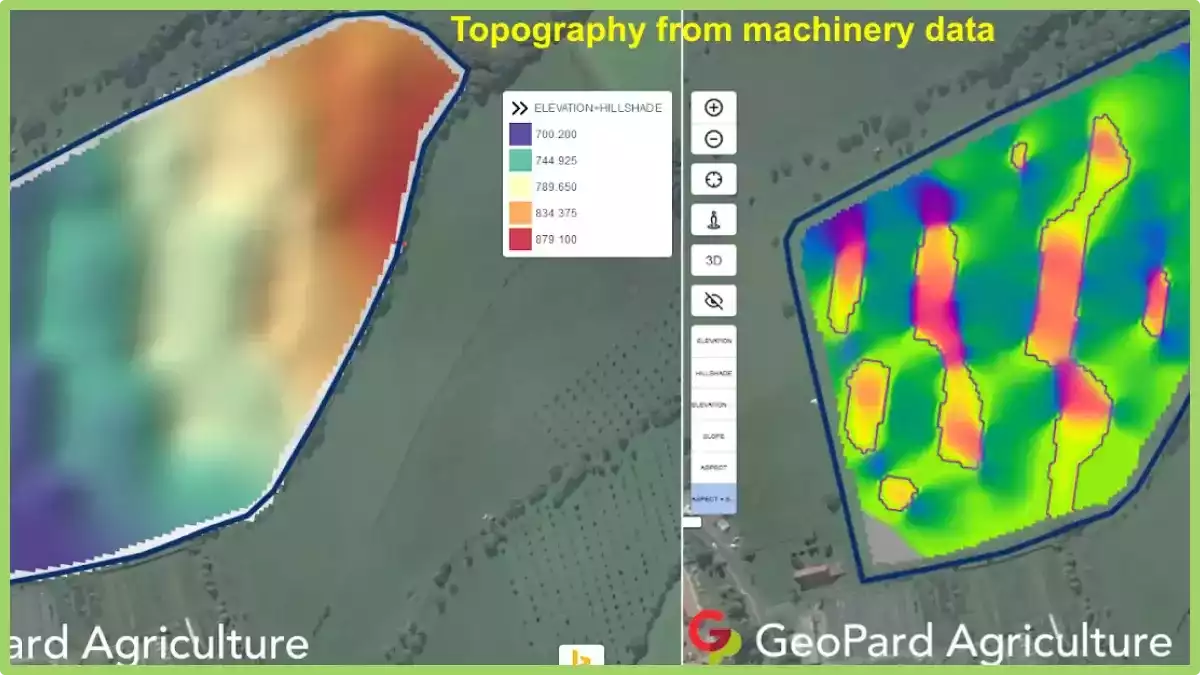
 Mapovanie dronmi funguje takto: dron je vybavený senzormi, ako sú kamery a laserové skenery, ktoré lietajú nad oblasťou a zachytávajú snímky alebo ju skenujú lasermi v rôznych výškach a uhloch. Zozbierané údaje sa potom spracujú do 3D máp, ktoré si môžete pozrieť na obrazovke počítača alebo smartfónu.
Mapovanie dronmi funguje takto: dron je vybavený senzormi, ako sú kamery a laserové skenery, ktoré lietajú nad oblasťou a zachytávajú snímky alebo ju skenujú lasermi v rôznych výškach a uhloch. Zozbierané údaje sa potom spracujú do 3D máp, ktoré si môžete pozrieť na obrazovke počítača alebo smartfónu.
 2. Mapy predpisovania hnojív, herbicídov a pesticídov s prieskumom dronmi
Už len jedna stratégia je zastaraná, pretože nielenže plytvá zdrojmi, ale môže tiež ovplyvniť zdravie a vitalitu plodín. Napríklad príliš veľa vody môže zničiť inak zdravú plodinu tým, že zabráni jej koreňom absorbovať kyslík, takže ani zavlažovanie nie je najlepším prístupom k pestovaniu bezchybných plodín. To isté platí pre hnojivá; použitie správneho množstva je pre rast kľúčové, pretože použitie príliš veľkého množstva spôsobuje spálenie koreňov, čo môže zničiť inak zdravé rastliny. Mapovanie dronmi umožňuje rozprašovať postreky iba tam, kde je problém, čím sa znižuje plytvanie zdrojmi a riziko poškodenia zdravých plodín, ktoré nevyžadujú rovnakú starostlivosť. Zatiaľ čo ľudia by nedokázali rozpoznať jedinečné požiadavky každej rastliny vo svojej plodine, technológia prieskumu dronmi to dokáže za pár minút.
3. Posúdenie plodín
Stlačením tlačidla sa spustia prieskumné misie; dron opustí nabíjaciu stanicu odolnú voči poveternostným vplyvom, zhromaždí údaje a nahraje ich. Zistenia dronu, ako aj štúdia detekcie stresu rastlín a účinnosti akýchkoľvek aktuálnych ošetrení alebo úprav, sa dajú použiť na prispôsobenie automatizovaných zavlažovacích systémov. S prieskumnými dronmi na mieste sú možné neustále kontroly stavu.
4. Počet populácií rastlín
Vďaka výkonnej technológii umelej inteligencie dronu je možné identifikovať akúkoľvek odrodu rastlín. To umožňuje určiť celkovú produkciu a celkové straty na začiatku a na konci každej sezóny, čím sa zvyšuje presnosť a povedomie o úspechu vegetačného obdobia.
5. Automatické klasifikácie pomocou snímok z dronov
Snímky z dronu dokážu určiť, nad akým typom poľnohospodárskej pôdy dron prelieta, či je orná, pastvinová alebo zmiešaná. Drony môžu počítať počet plodín a hospodárskych zvierat, ako je uvedené vyššie, aby overili, či sú záznamy aktuálne a či sú zaznamenané akékoľvek straty.
6. Sledovanie plodín
Zdravie plodín nie je vopred určené, pretože vývoj môžu ovplyvniť faktory prostredia. Teplota, vlhkosť, obsah živín a stopových prvkov, prítomnosť hmyzu a chorôb, dostupnosť vody a množstvo slnečného žiarenia sú všetko prvky, ktoré treba zvážiť. Všetky tieto faktory je možné sledovať pomocou rôznych užitočných záťaží dronov a mnohé z týchto nehmotných premenných je možné zvládnuť aplikáciou vody alebo postrekov priamo na potrebné oblasti. Čím zdravšie je okolie plodiny, tým silnejší je jej imunitný systém, a tým zdravšia je – s oveľa väčšou schopnosťou odrážať škodcov a choroby.
2. Mapy predpisovania hnojív, herbicídov a pesticídov s prieskumom dronmi
Už len jedna stratégia je zastaraná, pretože nielenže plytvá zdrojmi, ale môže tiež ovplyvniť zdravie a vitalitu plodín. Napríklad príliš veľa vody môže zničiť inak zdravú plodinu tým, že zabráni jej koreňom absorbovať kyslík, takže ani zavlažovanie nie je najlepším prístupom k pestovaniu bezchybných plodín. To isté platí pre hnojivá; použitie správneho množstva je pre rast kľúčové, pretože použitie príliš veľkého množstva spôsobuje spálenie koreňov, čo môže zničiť inak zdravé rastliny. Mapovanie dronmi umožňuje rozprašovať postreky iba tam, kde je problém, čím sa znižuje plytvanie zdrojmi a riziko poškodenia zdravých plodín, ktoré nevyžadujú rovnakú starostlivosť. Zatiaľ čo ľudia by nedokázali rozpoznať jedinečné požiadavky každej rastliny vo svojej plodine, technológia prieskumu dronmi to dokáže za pár minút.
3. Posúdenie plodín
Stlačením tlačidla sa spustia prieskumné misie; dron opustí nabíjaciu stanicu odolnú voči poveternostným vplyvom, zhromaždí údaje a nahraje ich. Zistenia dronu, ako aj štúdia detekcie stresu rastlín a účinnosti akýchkoľvek aktuálnych ošetrení alebo úprav, sa dajú použiť na prispôsobenie automatizovaných zavlažovacích systémov. S prieskumnými dronmi na mieste sú možné neustále kontroly stavu.
4. Počet populácií rastlín
Vďaka výkonnej technológii umelej inteligencie dronu je možné identifikovať akúkoľvek odrodu rastlín. To umožňuje určiť celkovú produkciu a celkové straty na začiatku a na konci každej sezóny, čím sa zvyšuje presnosť a povedomie o úspechu vegetačného obdobia.
5. Automatické klasifikácie pomocou snímok z dronov
Snímky z dronu dokážu určiť, nad akým typom poľnohospodárskej pôdy dron prelieta, či je orná, pastvinová alebo zmiešaná. Drony môžu počítať počet plodín a hospodárskych zvierat, ako je uvedené vyššie, aby overili, či sú záznamy aktuálne a či sú zaznamenané akékoľvek straty.
6. Sledovanie plodín
Zdravie plodín nie je vopred určené, pretože vývoj môžu ovplyvniť faktory prostredia. Teplota, vlhkosť, obsah živín a stopových prvkov, prítomnosť hmyzu a chorôb, dostupnosť vody a množstvo slnečného žiarenia sú všetko prvky, ktoré treba zvážiť. Všetky tieto faktory je možné sledovať pomocou rôznych užitočných záťaží dronov a mnohé z týchto nehmotných premenných je možné zvládnuť aplikáciou vody alebo postrekov priamo na potrebné oblasti. Čím zdravšie je okolie plodiny, tým silnejší je jej imunitný systém, a tým zdravšia je – s oveľa väčšou schopnosťou odrážať škodcov a choroby.