Avtomatizirano načrtovanje vzorčenja tal je sodobna tehnika preciznega kmetijstva, ki uporablja programsko opremo in algoritme za načrtovanje optimiziranih shem vzorčenja za kmetijska polja. Namesto ročnega izbiranja lokacij vzorčenja (na primer s sprehodom po polju v mreži ali risanjem subjektivnih con) avtomatizirani sistemi vnašajo različne podatkovne plasti (zemljevidi, zgodovinske donose, satelitske posnetke itd.) in izračunajo, kje zbrati vzorce tal.
Skratka, veliko ugibanja in ročnega dela nadomešča znanost, ki temelji na podatkih. Sodobna orodja lahko “v nekaj minutah izdelajo načrte vzorčenja tal na enem ali več poljih” z izbiro možnosti vzorčenja mreže ali con in uporabo “pametnih algoritmov za postavitev točk in usmerjanje poti”. Cilj je natančno zajeti spremenljivost tal, hkrati pa čim bolj zmanjšati čas, stroške in delo na terenu.
V čem se razlikuje od tradicionalnega vzorčenja?
Tradicionalne metode vzorčenja so pogosto vključevale delitev polja na enake celice (mrežno vzorčenje) ali hevristične cone in nato zbiranje fiksnega števila vzorcev v vsaki celici. Na primer, mrežno vzorčenje razdeli polje na pravilno mrežo (pogosto celice velikosti 1–5 hektarjev) in odvzame vzorce zemlje v vsaki celici. Čeprav se to pogosto uporablja, lahko to pomeni na stotine vzorcev in zelo visoke stroške dela: enakomerno razporejena mreža lahko da veliko število sond, kar poveča čas in stroške, potrebne za zbiranje in laboratorijsko delo.
Podobno se je consko vzorčenje zanašalo na presojo agronoma pri risanju zemljevidov “con upravljanja” (območij, za katera se domneva, da so si podobna), vendar je bilo to subjektivno in je lahko spregledalo skrite vzorce. Nasprotno pa avtomatizirano načrtovanje uporablja podatke (kot so zemljevidi pridelka, raziskave tal, satelitske slike NDVI ali skeniranje električne prevodnosti) za prepoznavanje resničnih vzorcev spremenljivosti. Pravzaprav omogoča računalnikom, da določijo, kje je treba odvzeti majhne vzorce tal, da bodo končni laboratorijski testi najbolje predstavljali polje.
Osrednji cilj avtomatiziranega načrtovanja vzorčenja tal je preprost: maksimizirati kakovost podatkov in vpogled ter hkrati zmanjšati trud in stroške. Dobro vzorčenje zajame dejansko variabilnost polja, kar omogoča natančno gnojenje ali apnjenje pozneje. Hkrati je odvzem tisočev nepotrebnih vzorcev potraten. Avtomatizirano načrtovanje išče statistično “sladko središče” – dovolj točk za natančno kartiranje rodovitnosti, vendar ne več, kot je potrebno.
V praksi to pomeni visoko natančnost podatkov in uporabne rezultate z najmanjšim časom in stroški. Na primer, ena nedavna študija je pokazala, da je združevanje polja v homogene cone upravljanja kmetom omogočilo zmanjšanje potrebnih vzorcev tal za 50–75%, ne da bi pri tem žrtvovali informacije.
Takšno povečanje učinkovitosti neposredno podpira večje dobičke in manjši vpliv na okolje. Dejansko kmetijski raziskovalci poudarjajo, da lahko natančno upravljanje tal (vključno s skrbnim vzorčenjem) poveča produktivnost in zmanjša količino odpadkov – kar je ključna potreba, saj se svetovno prebivalstvo do leta 2050 približuje 10 milijardam.
Ključne komponente avtomatiziranega sistema za načrtovanje tal
V nedavnih raziskavah o uvajanju preciznega kmetijstva več kot 40% velikih kmetij po vsem svetu poroča o uporabi naprednih podatkovnih slojev, kot so satelitski posnetki ali zemljevidi električne prevodnosti tal, kot del svojega rutinskega delovanja (podatki iz leta 2024). Leta 2023 je svetovni trg preciznega kmetijstva presegel 10 milijard USD, storitve, ki temeljijo na tleh in podatkih, pa so letno rasle s skoraj 12%.
Ta dejstva poudarjajo, da spodaj opisane ključne komponente niso teoretične, temveč vse bolj pogosta orodja na sodobnih kmetijah. Avtomatiziran načrtovalec vzorčenja tal je običajno sestavljen iz treh delov:
- vnos podatkov,
- algoritmi za analizo in
- rezultati/doseženi rezultati.
Vsak del se združi, da surove terenske podatke pretvori v načrt vzorčenja, ki je pripravljen za uporabo.
A. Vnos podatkov in integracija
Programska oprema za avtomatizirano načrtovanje uporablja različne terenske podatke. Med pogoste vhodne podatke spadajo:
1. Geoprostorski zemljevidi: Ti računalniku povedo, kje in kako se polje fizično spreminja. Primeri so digitalne meje polj (pogosto kot datoteke shapefile ali KML) in modeli topografije/višinske nadmorske višine (podatki DEM). Nadmorska višina vpliva na vlažnost tal in porazdelitev hranil, zato načrtovalci pogosto različno tehtajo visoka in nizka območja. Če so na voljo, so lahko vhodni podatki tudi sloji kmetijskega GIS-a, kot so obstoječa območja upravljanja.

2. Podatki o zgodovinskih testih tal: Rezultati preteklih analiz tal (kot so zemljevidi pH, dušika, fosforja, kalija, organskih snovi) so izjemno dragoceni. Neposredno pokažejo, kje imajo tla nizko ali visoko rodovitnost. Načrtovalci lahko uvozijo prejšnje laboratorijske rezultate v obliki zemljevidov ali preglednic. Če kmetija izvaja testiranja že leta, ta zgodovina pomaga prilagoditi načrt znanim problematičnim mestom.
3. Zemljevidi pridelka: Številne kmetije imajo monitorje pridelka kombajnov iz prejšnjih sezon. Plasti, ki kažejo, kateri deli polja dosledno dajejo visoke ali nizke donose, lahko kažejo na osnovne razlike v tleh. Na primer, deli polja, ki so vedno dajali malo pridelka, so lahko revni s hranili; načrtovalci vzorčenja uporabljajo karte pogostosti pridelka za iskanje takih območij. Priporočljivo je kombinirati podatke o pridelku iz več let, da nenavadno vreme v enem letu (poplava, suša) ne bi izkrivilo načrta.
4. Podatki daljinskega zaznavanja: Satelitski ali dronski posnetki pridelka so neprecenljivi za opazovanje vzorcev, ki so nevidni s prostim očesom. Vegetacijski indeksi, kot sta NDVI (normalizirani diferencialni vegetacijski indeks) ali NDRE, zajemajo živahnost rastlin in pogosto odražajo rodovitnost ali vlago tal. Poletni zemljevid NDVI brez oblakov lahko poudari območja dosledno boljše ali slabše rasti pridelka. Mnogi načrtovalci uporabljajo tudi multispektralne posnetke iz zraka ali dronov. Poleg tega proksimalni senzorski zemljevidi, kot je elektromagnetna prevodnost (ECa), dajejo informacije o teksturi tal in vsebnosti soli, kar je pogosto povezano z rodovitnostjo.
V praksi dobri načrtovalci uporabnikom omogočajo uvoz ali povezovanje katere koli od teh plasti. Orodje v oblaku lahko na primer kmetu omogoči, da naloži datoteko z mejami polja in nato nanjo nanese sliko NDVI in zemljevide pridelka za isto polje. Programska oprema jih nato skupaj analizira.
Kot je navedeno v enem od priročnikov za razširitev, so se lastnosti tal, kot so organski ogljik, električna prevodnost (ECa), tekstura tal (pesek/mulj/glina), topografija, zračne fotografije in indeksi, kot je NDVI, izkazali za koristne pri določanju območij upravljanja. Z združitvijo teh podatkovnih plasti v en sistem lahko načrtovalec “vidi” celotno sliko variabilnosti polja, preden izbere vzorčne točke.
B. Algoritem in logika načrtovanja
Algoritmi so v središču avtomatiziranega vzorčenja tal. Od leta 2025 številne komercialne platforme zdaj vključujejo tehnike združevanja v grozde s strojnim učenjem, hibridne statistične modele ali generiranje con na podlagi PCA. Njihova učinkovitost se pogosto primerja z navzkrižno validacijo z uporabo zadržanih podatkov o tleh, pri čemer uporabniki poročajo o izboljšanju zajema variance do 15–20% v primerjavi s starimi metodami. Spodaj je opisano, kako delujejo tipične metode:
1. Vzorčenje na podlagi območij (gručno)To je najpogostejša metoda. Sistem uporablja logiko združevanja na vhodnih zemljevidih, da polje razdeli na ločena območja, ki so si notranje podobna. Na primer, lahko izvede združevanje k-srednjih vrednosti na združenih podatkovnih slojih (npr. pridelek + NDVI + podatki o tleh), da oblikuje 3–6 “con upravljanja”. Ker se predpostavlja, da je vsako območje dokaj enotno, je potrebnih le nekaj vzorcev na območje.
Programska oprema nato porazdeli vzorčne točke znotraj vsakega območja (pogosto kot majhno mrežo ali naključne točke), da zajame morebitno preostalo variabilnost. Sodobna orodja uporabniku pogosto omogočajo, da uteži različne podatkovne plasti ali prilagodi število con. Nekatera celo najprej uporabljajo PCA (analizo glavnih komponent), da zmanjšajo podatke in nato združijo rezultate v skupine.

2. Vzorčenje mreže: V tem načinu programska oprema preprosto prekrije polje z običajno mrežo in v središču vsake celice ustvari točko. Uporabniki lahko nastavijo velikost celice (npr. 1,5 hektarja) ali skupno število točk. Načrtovalec lahko prilagodi tudi gostoto mreže na spremenljivem terenu: na primer manjše celice na hribih, kjer je spremenljivost večja, in večje celice na ravnem terenu. Prednost je enakomerna pokritost brez pristranskosti.
Slaba stran je, da zelo fina mreža pomeni veliko vzorcev, groba mreža pa lahko spregleda podrobnosti. Avtomatizirani sistemi lahko pomagajo izbrati razumen razmik – študije na primer kažejo, da mreža velikosti 1 hektarja zajame približno 801 TP3T variabilnosti polja, medtem ko mreža velikosti 2,5 hektarja pade na natančnost ~761 TP3T. Nekatera programska oprema daje povratne informacije o pričakovani natančnosti ali pokritosti na podlagi izbrane mreže.
3. Usmerjeno (ciljno) vzorčenje: Nekatera polja imajo specifične znane težave (npr. slane zaplate, “mrtve cone” z nizkim donosom ali območja z zbitostjo). Avtomatiziran načrtovalec lahko te težave vključi tako, da nanje postavi dodatne točke. Če na primer satelitski posnetki ali zemljevid EC prikazujejo vročo točko slanosti, lahko uporabnik orodju naroči, naj na tem območju doda vzorce. To zagotavlja intenzivnejše vzorčenje problematičnih območij.
4. Statistični pregledi: Vse metode temeljijo na statističnih temeljih. Načrtovalci pogosto zagotovijo, da število in lokacija vzorcev izpolnjujeta osnovne statistične zahteve za reprezentativnost. Na primer, lahko preverijo, ali ima vsako območje minimalno površino ali ali so vzorci razpršeni, da se prepreči združevanje.
Nekateri uporabljajo Monte Carlo simulacije ali prostorsko statistiko, da potrdijo, ali bo zasnova načrta verjetno zajela spremenljivost polja. Cilj je preprečiti pristransko vzorčenje; z avtomatskim ustvarjanjem točk sistem odpravlja pogosto težavo "vzorčenja zaradi udobja" (jemanje vzorcev le tam, kjer je enostavno hoditi) in namesto tega sledi sistematičnim ali naključnim vzorcem, ki jih narekujejo podatki.
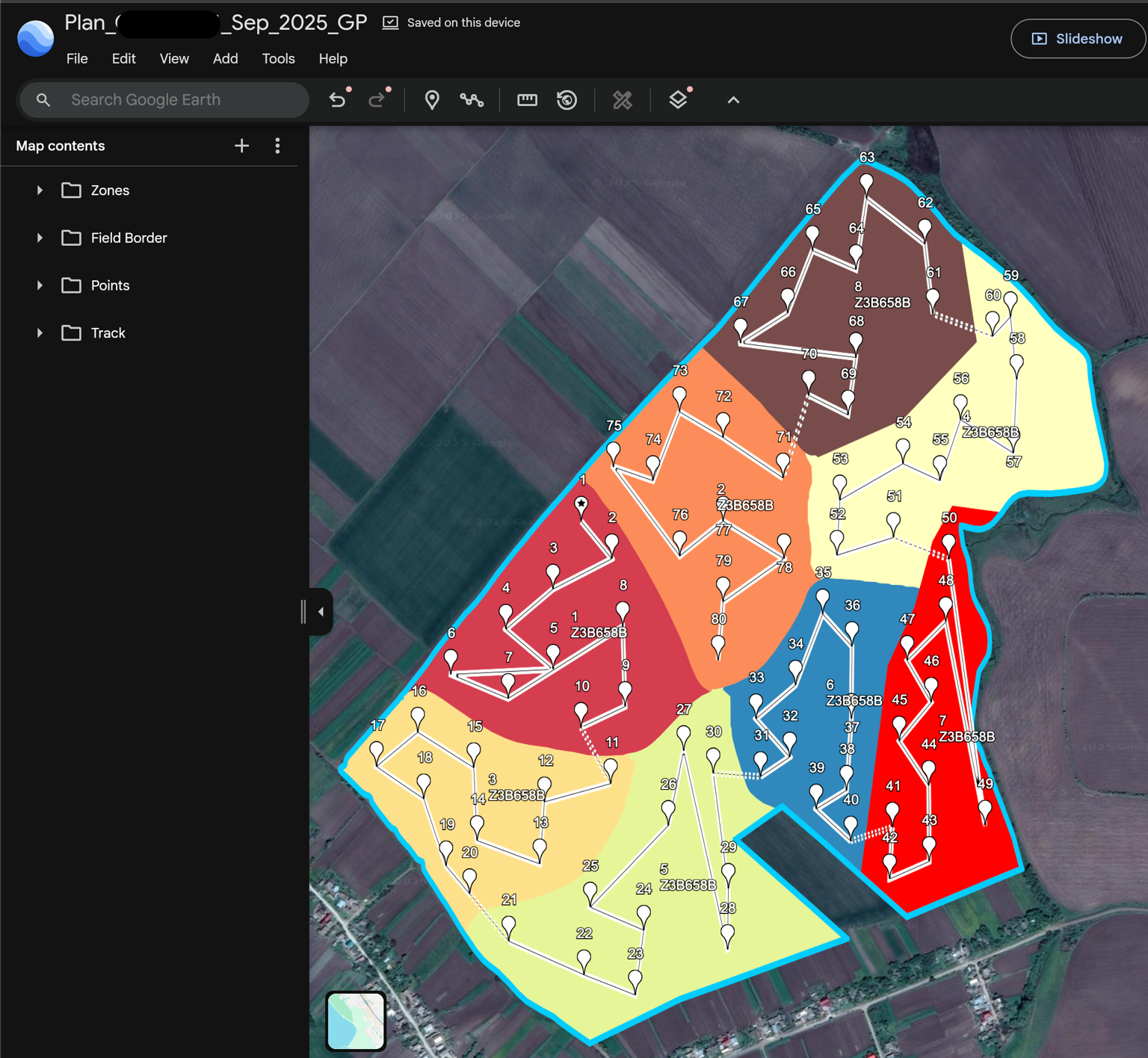
V mnogih sistemih se algoritem zažene enkrat, ko so nastavljeni vsi sloji in parametri. Na primer, aplikacija v oblaku se lahko zažene v nekaj sekundah in izpiše zemljevid rdečih in rumenih točk v vsaki coni (glejte spodnjo sliko). Te točke predstavljajo, kje je treba odvzeti vzorci tal.
Program lahko interno uporablja običajna orodja za združevanje v gruče (npr. K-srednja povprečja, mehka c-srednja povprečja) ali prilagojene hevristike za uravnoteženje postavitve točk. Ko so območja definirana, številna orodja znotraj vsakega območja uporabljajo preproste geometrijske vzorce (npr. osrednje črte ali cikcak) za razmik med dejanskimi vzorčnimi točkami.
C. Rezultati in končni rezultati
V anketah iz leta 2024 je več kot 70% ponudnikov storitev preciznega kmetijstva poročalo, da so avtomatizirani izvozi (GPS poti, listi z laboratorijskimi etiketami) med najbolj cenjenimi funkcijami. Brezhiben prenos podatkov z načrta na polje postaja diferencialna prednost kmetijske programske opreme. Končni rezultat avtomatiziranega načrtovalca vzorčenja je običajno niz konkretnih navodil za terensko ekipo, vključno z:
1. Zemljevid georeferenciranih vzorčnih mest: To je običajno zemljevid (PDF, plast GIS ali pot v mobilni aplikaciji), ki prikazuje vsako lokacijo talnega jedra s koordinatami GPS. Lahko prikazuje barvne cone in oštevilčene točke. Terenski tehniki uporabljajo ta zemljevid na tablici ali natisnjenem izvodu za navigacijo po terenu. Nekateri sistemi celo izvažajo v priljubljene aplikacije GPS-NAV ali v formate (kot je ISOXML), ki se samodejno naložijo v natančne kmetijske slušalke.
2. Protokol vzorčenja/Delovni nalog: To je pisni priročnik, ki opisuje, kako izvesti načrt. Običajno vključuje navodila o gostoti vzorcev (npr. “vzemite 5 jeder na cono”), globinah (npr. 0–6 palcev, 6–24 palcev), potrebnih orodjih za vzorčenje in pravilih označevanja. Lahko navaja, katere točke so “jedrni” vzorci (vsak je vzet posebej) ali “sestavljeni” (več podjeder je mešanih). Programska oprema lahko ustvari laboratorijske nalepke ali oznake vrečk z edinstvenimi identifikatorji, ki ustrezajo vsaki točki.
3. Predloge za uvoz podatkov: Ko so vzorci zbrani in laboratorijsko testirani, je treba rezultate ponovno integrirati z načrtovalcem. Številni sistemi ponujajo predlogo v obliki Excel ali CSV, kamor je mogoče vnašati laboratorijske rezultate vrstico za vrstico (ena vrstica na točko). Ko je predloga naložena nazaj, programska oprema samodejno ponovno poveže podatke o tleh s koordinatami zemljevida. S tem se zanka sklene in omogoči takojšnje ustvarjanje kart lastnosti tal. Avtomatizirani načrtovalci to pogosto brezhibno obravnavajo, tako da se novi podatki neposredno vnesejo v sistem GIS ali VRA (aplikacija s spremenljivo količino) kmetije.
Ti izhodi zagotavljajo, da se načrt lahko izvede z minimalno zmedo in da so podatki pripravljeni za odločanje. Nekatera napredna orodja celo samodejno natisnejo datoteke GPS-navodil in laboratorijske oznake. Ključ je integriran potek dela: ko so podatki v sistemu, načrtovalec opravi težko delo analize in preprosto posreduje jasna navodila posadki.
Potek dela za avtomatizirano načrtovanje vzorčenja tal (korak za korakom)
Glavni ponudniki programske opreme za precizno kmetijstvo poročajo, da do leta 2025 več kot 60% njihovih uporabnikov ustvari načrte vzorčenja tal kot del rutinskih operacij. Mnogi kmetje zdaj načrtovanje vzorčenja obravnavajo kot standardni letni korak in ne kot poseben projekt. Ta vse večja uporaba poudarja pomen razumevanja spodnjega poteka dela. Tipičen avtomatiziran projekt vzorčenja tal sledi jasnemu zaporedju korakov. Ti so pogosto vgrajeni v aplikacijo za načrtovanje kot voden postopek:
i. Določite cilje: Pred načrtovanjem uporabnik določi, zakaj vzorči. Ali gre za izdelavo podrobnega zemljevida hranil za gnojenje s spremenljivo količino? Za določitev izhodiščne vrednosti za zdravje tal? Za preiskavo območja izbruha bolezni? Jasni cilji (npr. “Optimizacija območij gnojenja z dušikom” ali “Preverjanje potreb po količini apna”) pomagajo pri kasnejših nastavitvah.

ii. Nalaganje podatkov in izbira sloja: Nato uporabnik naloži ali izbere prostorske podatkovne plasti, ki jih želi uporabiti. Na primer: zemljevid meja polja (obvezno), plus kateri koli od zemljevidov pridelka, raziskav tal, slik NDVI, modelov višin itd. Programska oprema je pogosto predhodno povezana s podatki v oblaku (katalogi satelitskih posnetkov ali pretekli podatki kmetije), zato uporabnik samo klikne, katera leta ali plasti želi vključiti.
iii. Nastavitev parametrovUporabnik nato konfigurira intenzivnost vzorčenja. To so lahko ciljne točke na hektar (npr. 1 točka na 2 hektarja), želeno število con (recimo 3 cone) ali velikost mrežnih celic. Uporabnik lahko izbere tudi vrsto vzorčenja (mrežno ali consko, jedrno ali sestavljeno). Nekateri sistemi uporabniku omogočajo, da uteži plasti (npr. pri določanju con doda dodatno težo zemljevidu pH tal). S tem korakom se umeri delovanje algoritma.
iv. Algoritem izvajanja (generiranje načrta): Ko so podatki in parametri nastavljeni, načrtovalec izvede analizo. V nekaj sekundah ali minutah obdela vhodne plasti, razmejuje območja ali mreže in postavlja vzorčne točke. Rezultat je osnutek načrta. Sodobni sistemi lahko prikažejo 2D-zemljevid ali 3D-pogled načrta.
v. Pregled in prilagoditev (neobvezno): Uporabnik nato pregleda načrt. Večina programske opreme omogoča klikanje na cone ali točke, da se prepriča, da so videti smiselne. Uporabnik lahko po potrebi ročno doda ali odstrani točke (na primer, da se izogne nedostopnemu mokremu območju ali doda točko na novo identificirano hladno točko). Nekateri načrtovalci omogočajo sproti premikanje točk ali združevanje con. Vendar je cilj minimalno ročno prilagajanje – idealno je, da je prvi osnutek sistema dober.
vi. Načrt izvoza in priprava terenskega dela: Končno se dokončan načrt izvozi v potrebnih formatih. Zemljevid se pošlje na terensko napravo ali GPS enoto. Natisnejo se laboratorijske oznake in delovni nalog. Na tej točki lahko terenske ekipe gredo na teren in zberejo natančno določene vzorce. Celotna faza načrtovanja, ki je agronomom prej vzela ure ali celo dni časa, je zdaj stisnjena v nekaj minut delovanja programske opreme.
Za velike kmetije ali zadruge se lahko isti potek dela ponovi v paketnem načinu. Številne platforme podpirajo načrtovanje na več poljih, kar pomeni, da uporabnik izbere več polj hkrati in skupaj ustvari vse svoje načrte vzorčenja. To omogoča enostavno povečanje obsega načrtovanja z enega poskusnega polja na več sto hektarjev.
Ključne prednosti avtomatiziranega načrtovanja vzorčenja tal
Nedavna poročila iz industrije kažejo, da so kmetije, ki uporabljajo avtomatizirano načrtovanje, skrajšale čas načrtovanja vzorčenja tal za 801 TP3T ali več, mnoge pa poročajo o 20–301 TP3T zmanjšanju stroškov, povezanih z vzorčenjem, v prvi sezoni. Ti rezultati iz resničnega sveta odražajo spodaj opisane prednosti. Avtomatizirano načrtovanje vzorčenja tal ponuja več pomembnih prednosti v primerjavi s tradicionalnimi metodami:
1. Veliko večja učinkovitost: Z avtomatizacijo procesa načrtovanja je mogoče tisto, kar je prej trajalo ure ali dneve, opraviti v nekaj minutah. Ko so vneseni vsi podatkovni sloji, programska oprema skoraj v trenutku zažene algoritem. Na primer, ena platforma oglašuje, da je mogoče načrte vzorčenja za številna polja ustvariti “v nekaj minutah”. To drastično skrajša čas tehnikov in agronomov. V praksi en sam klik načrtovalca ustvari na desetine vzorčnih točk z natančnim GPS-om, kar nadomesti zamudno ročno kartiranje.

2. Izboljšana natančnost in objektivnost: Načrti, ki temeljijo na podatkih, odpravljajo človeško pristranskost. Tradicionalni zemljevidi con, ki jih narišemo z očmi, lahko spregledajo skrito variabilnost; avtomatizirane cone temeljijo na dejanskih vzorcih izmerjenih podatkov. Algoritmi zagotavljajo, da vzorčne točke sistematično pokrivajo raznolikost polja. Kot ugotavlja specialist za razširitev MSU, je vzpostavitev upravljavskih con na podlagi podatkov “ključnega pomena za zagotovitev veljavnosti in natančnosti rezultatov”, ker upošteva dejanske prostorske razlike. Algoritmi zagotavljajo, da vzorčne točke sistematično pokrivajo raznolikost polja.
3. Stroškovna učinkovitost: Z osredotočanjem vzorcev tja, kjer so pomembni, je lahko potrebnih manj jeder. Študije so pokazale, da lahko dobri načrti vzorčenja con zmanjšajo laboratorijske stroške, saj zahtevajo 50–75% manj vzorcev. Vsak laboratorijski test tal stane denar, zato zmanjšanje števila podvajanih ali nepotrebnih testov prihrani denar. Prav tako skrajšanje časa na terenu (manj hoje) prihrani delo ali gorivo za stroje. Avtomatizirano načrtovanje tako izboljša donosnost naložbe v testiranje tal.
4. Boljša podpora odločanju: Visokokakovostno vzorčenje vodi do kakovostnejših predpisov o gnojilih in odločitev o upravljanju. Na primer, z uporabo prostorskega vzorčenja lahko kmetje prilagodijo uporabo apna in hranil po celotnem polju. Vizualizacija kart pomanjkanja (pridobljenih z gostim vzorčenjem) pomaga pri “učinkovitem obravnavanju problematičnih področij” in “doseganju prostorsko spremenljive uporabe hranil”. Skratka, boljši podatki o tleh omogočajo natančnejše stopnje fosforja, kalija, apna itd., kar povečuje donose ali prihrani stroške.
5. Prilagodljivost: Avtomatizirane načrtovalce je enostavno razširiti. Z njimi lahko brez dodatnega napora obdelamo eno samo majhno polje ali več deset polj. Funkcije za več polj pomenijo, da lahko svetovalec naloži 100 polj in samodejno ustvari 100 načrtov. To je primerno za velike kmetije ali kmetijske storitve, ki ponujajo testiranje tal v velikem obsegu. Ko kmetijska dejavnost raste, deluje isti potek dela brez dodajanja ročnega bremena.
Avtomatizirano načrtovanje spremeni vzorčenje tal iz okornega opravila v poenostavljen potek dela s podatki. Kmetom in agronomom omogoča, da hitreje in ceneje pridobijo boljše karte tal, kar posledično izboljša učinkovitost gnojenja poljščin in upravljanja zemljišč.
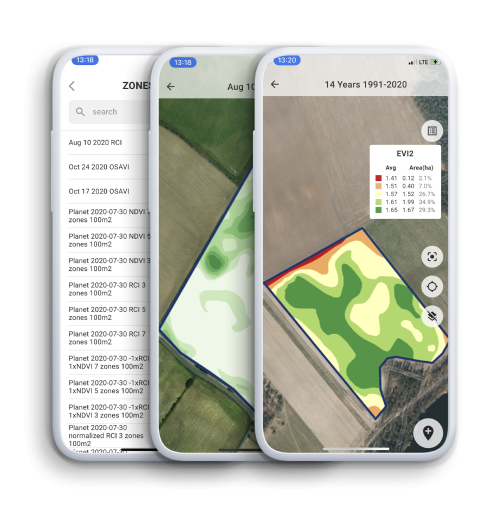
Kako programska oprema GeoPard pomaga pri avtomatiziranem načrtovanju vzorčenja tal?
Programska oprema GeoPard prinaša avtomatizacijo, inteligenco in preprostost v postopek vzorčenja tal. GeoPard, zasnovan za kmete, agronome, laboratorije za talne preiskave, trgovce na drobno in prodajalce, vam pomaga ustvariti optimizirane načrte vzorčenja tal z uporabo programske opreme v le nekaj minutah – za eno polje ali celotno kmetijo. Z Vadnica za programsko opremo za vzorčenje tal GeoPard, lahko izbirate med vzorčenjem na podlagi mreže ali območij, izberete osnovne ali sestavljene metode in pustite, da algoritmi, ki jih poganja umetna inteligenca, samodejno postavijo vzorčne točke, izračunajo poti, natisnejo laboratorijske oznake in izvozijo zemljevide, ki so pripravljeni za uporabo.
1. Pametnejše načrtovanje, hitrejši rezultati
GeoPardov programski delovni proces omogoča enostavno in učinkovito načrtovanje vzorčenja tal:
- Začni nov načrt – Izberite eno ali več polj ali pa za doslednost kopirajte nastavitve iz preteklih načrtov.
- Izberite vrsto vzorčenja – Za enakomerno pokritost izberite vzorčenje na podlagi mreže ali vzorčenje na podlagi območij, da se osredotočite na spremenljivost polja.
- Nastavi vzorčni slog – Za stroškovno učinkovitost izberite kompozitne materiale ali pa vzorčenje jedra za podrobno analizo tal.
- Konfiguriraj točke in pot – GeoPardova pametna logika postavlja točke z uporabo prilagodljivih algoritmov, kot so pametna priporočila, osrednja linija, vzorci N/Z ali W.
- Optimizirajte usmerjanje – Izberite Pametna optimalna pot za avtomatizirane vzorčevalnike ali Usmerjanje po območjih za ročne ekipe.
- Tiskanje in izvoz – Natisnite laboratorijske oznake po meri in izvozite načrte v obliki KML ali Shapefile za GPS navigacijo.

2. Inteligentne funkcije, ki prihranijo čas
GeoPardova programska oprema, ki jo poganja umetna inteligenca, se samodejno prilagodi obliki, spremenljivosti in podatkom vsakega polja. Nadzorujete lahko velikost mreže, število točk na območje, globino vzorca in kote vrtenja – kar zagotavlja natančno, a učinkovito pokritost vzorčenja.
Večterno načrtovanje omogoča svetovalcem ali velikim kmetijam, da naenkrat ustvarijo več načrtov vzorčenja tal, s čimer ohranjajo doslednost v vseh letnih časih in regijah.
3. Izvedite načrte na terenu z GeoPard Mobile
Mobilna aplikacija GeoPard omogoča terenskim ekipam nemoteno izvajanje vzorčenja. Ogledate si lahko zemljevide, se pomaknete do vsake točke in označite vzorce kot dokončane – tudi brez povezave. Aplikacija podpira tudi sledenje v realnem času, beleženje in tiskanje etiket neposredno iz mobilnih naprav.
4. Preprosto označevanje in izvoz
GeoPard poenostavlja označevanje z avtomatskimi predlogami na podlagi con ali točk. Uporabniki lahko prenesejo in natisnejo že pripravljene oznake PDF za vreče z zemljo ali laboratorijske vzorce, s čimer zagotovijo sledljivost vsakega vzorca. Načrte in poti je mogoče izvoziti tudi v navigacijske aplikacije, kar zagotavlja nemoteno izvedbo od načrtovanja do dostave v laboratorij.
5. Zakaj strokovnjaki izberejo programsko opremo za vzorčenje tal GeoPard
- Hitrost: Izdelajte načrte vzorčenja tal v nekaj minutah.
- NatančnostPametni algoritmi optimizirajo vsako vzorčno točko.
- PrilagodljivostPodpira tako mrežno kot consko vzorčenje, jedrne in kompozitne metode.
- PrilagodljivostNačrtujte za eno polje ali stotine.
- Učinkovitost na terenu: Navigacija brez povezave in sledenje napredku v živo.
GeoPard spreminja vzorčenje tal v poenostavljen, podatkovno voden potek dela. Z načrtovanjem z umetno inteligenco, pametnim usmerjanjem in integriranimi mobilnimi orodji uporabnikom pomaga zbirati zanesljivejše podatke o tleh – hitreje in dosledneje. Avtomatizirano načrtovanje vzorčenja tal naredi pametnejše, hitrejše in pripravljeno na prihodnost preciznega kmetijstva.
Praktični vidiki izvedbe
Študija iz leta 2025 je pokazala, da je bilo več kot 30% neuspelih projektov preciznega kmetijstva posledica nizke integritete podatkov ali neskladij med programsko in strojno opremo. To poudarja, kako pomembne so naslednje praktične točke pri uvajanju avtomatiziranega načrtovanja vzorčenja. Čeprav so prednosti očitne, je uspešna uporaba avtomatiziranega načrtovanja vzorčenja odvisna od nekaj ključnih praktičnih dejavnikov:
1. Kakovost podatkov je ključnega pomena: Smeti noter, smeti ven. Avtomatiziran načrt je lahko le tako dober, kot so podatki, ki so vanj vneseni. Če imajo zemljevidi pridelka napake GPS ali če je sloj geodetske raziskave tal zastarel, so lahko nastala območja zavajajoča. Strokovnjaki za precizno kmetijstvo poudarjajo skrbno upravljanje podatkov: vedno zbirajte in kalibrirajte izvorne podatke.

Na primer, slaba kalibracija merilnika pridelka ali napačno označena polja lahko kasneje privedejo do slabih predpisov. En dodatni članek pridelovalce brez ovinkarjenja opominja: “Vsi smo že slišali stavek 'smeti noter, smeti ven'. Netočni ali slabi podatki imajo lahko posledice še vrsto let.‘ Z drugimi besedami, preden zaženete avtomatizirane načrte, vložite čas v čiščenje in potrjevanje vnosov.
2. Programska oprema in platforme: Ta orodja so na voljo v različnih oblikah. Nekatera so samostojni namizni GIS programi, druga pa so aplikacije v oblaku ali mobilne aplikacije. Številne platforme v oblaku za precizno kmetijstvo (npr. Trimble Ag Software, Climate FieldView, FarmLogs ali specializirana orodja, kot sta GeoPard ali AgLeader SMS) zdaj vključujejo module za avtomatizirano vzorčenje.
Kmetje ali svetovalci naj izberejo platformo, ki se dobro integrira z njihovimi obstoječimi sistemi. Uvoziti mora običajne podatkovne formate (datoteke oblike, .csv za donos, slike) in jih izvoziti v GPS naprave ali aplikacije za kartiranje. Upoštevajte tudi stroške/naročnino: nekatere storitve zaračunavajo na paket ali na hektar.
3. Združljivost strojne opreme in izvoza: Načrt je uporaben le, če mu vzorčevalnik lahko sledi. Prepričajte se, da izhodna oblika (zemljevidi, datoteka GPS ali podatki aplikacije) deluje z vašimi terenskimi napravami. Mnogi sistemi izvažajo podatke neposredno v mobilne tablice ali orodja RTK-GPS. Drugi lahko ponujajo datoteke KML ali shapefile, ki jih je mogoče naložiti v generične navigacijske aplikacije. Preverite, ali se laboratorijske oznake in podatkovni listi ujemajo s pričakovanji vašega laboratorija za tla. V bistvu mora biti povezana celotna veriga – od načrtovanja do zbiranja vzorcev in laboratorijske analize.
4. Integracija v potek dela preciznega kmetijstva: Vzorčenje tal je en korak v širšem ciklu preciznega kmetovanja. Po načrtovanju (Načrtovanje) sledi Vzorčenje (izvedba terenskega dela) → Analiza (pošiljanje vzorcev v laboratorij, pridobitev rezultatov) → Predpisovanje (uporaba podatkov za izdelavo aplikacijskih kart) → Uporaba (nanos spremenljive količine na polju). Avtomatizirano načrtovanje bi se moralo gladko ujemati s tem ciklom.
Na primer, ko so rezultati prejeti, je treba podatke vnesti v programsko opremo za upravljanje hranil ali orodja za gnojila VR. Dobra programska oprema za načrtovanje se pogosto integrira s temi sistemi. MSU Extension ugotavlja, da vizualizacija rezultatov po vzorčenju omogoča učinkovito uporabo: kmetje lahko na primer spreminjajo odmerke apna ali gnojil med območji na podlagi laboratorijskih zemljevidov.
5. Usposabljanje in sodelovanje uporabnikov: Končno, uvedba avtomatiziranega načrtovanja pomeni zaupanje v tehnologijo. Vodje kmetij in agronomi bodo morda potrebovali usposabljanje, da bi razumeli, kako se ustvarjajo cone. Pametno je začeti s pilotnimi poskusi: avtomatiziran načrt zaženite vzporedno s preizkušenim ročnim načrtom za eno polje in primerjajte rezultate.
Sčasoma, ko bodo uporabniki opazili prihranjen čas in (v idealnem primeru) izboljšano doslednost, bo zaupanje raslo. V mnogih študijah primerov pridelovalci ugotovijo, da se objektivno izpeljane cone pogosto ujemajo z njihovo intuicijo po dogodku – vendar je za pridelavo potrebno veliko manj truda.
Prihodnji trendi v avtomatiziranem vzorčenju
Tržne napovedi ocenjujejo, da bo do leta 2025 skupni trg avtonomnih terenskih robotov in orodij za natančno načrtovanje tal presegel 1,2 milijarde USD, z dvomestno rastjo na leto. Hkrati zgodnji poskusi kažejo, da lahko robotski vzorčevalniki zadenejo točke GPS z napako <10 cm, kar prekaša ročne ekipe pod gosto vegetacijo. Ti signali kažejo, kam gre industrija. Področje vzorčenja tal se še naprej hitro razvija. Tudi onkraj avtomatiziranih algoritmov načrtovanja vidimo na obzorju več vznemirljivih trendov:
1. Umetna inteligenca in strojno učenje: Poleg preprostega združevanja v skupine se uporabljajo tudi napredne metode umetne inteligence. Raziskovalci na primer razvijajo orodja, ki uporabljajo globoko učenje na podlagi zgodovinskih satelitskih posnetkov za napovedovanje stanja tal in predlaganje vzorčnih točk. Državna univerza v Mississippiju je del projekta 11 institucij, ki ga financira USDA-NIFA, za razvoj “zasnove vzorčenja tal na podlagi satelitov” (S3DTool).
Ta sistem bo uporabljal algoritem globokega učenja na večletnih satelitskih posnetkih za samodejno priporočanje lokacij vzorčenja, pri čemer se bo v bistvu iz preteklih satelitskih podatkov učil, katera območja je treba vzorčiti. Če bodo uspešna, bi lahko takšna orodja, ki jih poganja umetna inteligenca, načrtovanje naredila še bolj avtonomno in napovedno, pri čemer bi upoštevala subtilne vzorce vremena in pridelkov skozi čas.
2. Senzorji v realnem času in proksimalni senzorji: Raziskovalci in podjetja raziskujejo senzorje na poti, ki bi lahko zmanjšali potrebo po fizičnih jedrih. Na primer, optični senzorji, nameščeni na opremi, lahko neprekinjeno merijo odbojnost pridelka ali tal. Senzorji električne prevodnosti, ki se vlečejo čez polje, lahko sproti ustvarjajo zemljevide teksture tal.
V prihodnosti si je mogoče predstavljati, da bo sejalnik ali škropilnik nosil sonde za tla, ki bodo med premikanjem samodejno vzorčile. Ti podatki bi se lahko neposredno vnesli v sistem za načrtovanje (ali celo nadomestili diskretna jedra) za skoraj neprekinjeno kartiranje tal. Kot ugotavlja eden od blogov o preciznem kmetijstvu, že imamo senzorje, kot sta Greenseeker ali Veris EC, ki ustvarjajo zelo natančne zemljevide – trend je v smeri njihovega povezovanja z analitiko v realnem času.
3. Avtonomno robotsko vzorčenje: Poleg načrtovanja se pojavljajo tudi popolnoma avtonomni vzorčevalniki. Namesto tehnika s sondo bodo nekatere kmetije uporabile robotska vozila za natančno zbiranje vzorcev na načrtovanih GPS točkah. Podjetja, kot je RogoAg, že tržijo samovozeče vzorčevalnike tal z vodenjem RTK-GPS, ki vsakič dosežejo natančne lokacije (v terenskih poskusih so robotski vzorčevalniki dosegli večjo natančnost in doslednost kot človeški operaterji).
Ko bodo ti roboti postali pogosti, bi lahko potek vzorčenja postal resnično neposreden: avtomatizirano načrtovanje → namestitev robota → avtomatizirano zbiranje vzorcev → označevanje vzorcev. To bo močno povečalo prepustnost testiranja tal. Čeprav je robotika še vedno nova, strokovne raziskave kažejo, da se razvija – in vzorčenje tal je naravna rešitev za avtomatizacijo, saj je vsaka lokacija vzorčenja GPS točka.
4. Integrirane platforme za odločanje: Nenazadnje pričakujemo, da bo načrtovanje vzorčenja del vedno večjih integriranih sistemov upravljanja kmetij. Prihodnje platforme morda ne bodo le oblikovale vzorčnih točk, temveč bodo lahko takoj analizirale vrnjene podatke, se povezale s trgi gnojil, vremenskimi napovedmi in agronomskimi modeli.
Na primer, ena od vizij je sistem, ki iz leta v leto spremlja trende zdravja tal in samodejno prilagaja intenzivnost vzorčenja glede na pretekle trende ali tveganje pridelka. To bo zahtevalo podatkovne cevovode – analitiko, ki jo poganja umetna inteligenca, računalništvo v oblaku in povezljivost interneta stvari. Skratka, “pametna kmetija” prihodnosti bo vzorčenje tal obravnavala kot neprekinjen, avtomatiziran proces, integriran z vsem, od traktorjev GPS do podatkov o vremenu.
Zaključek
Avtomatizirano načrtovanje vzorčenja tal predstavlja močno konvergenco kmetijstva in podatkovne znanosti. Z uporabo GIS-a, senzorjev in pametnih algoritmov spreminja vzorčenje tal iz dolgočasnega opravila v hiter, natančen in prilagodljiv postopek. Kmetje in agronomi, ki uporabljajo ta orodja, lahko dobijo natančnejše slike rodovitnosti tal, hkrati pa prihranijo delo in stroške. V praksi to pomeni bogatejše karte tal, bolje ciljno usmerjeno gnojenje in navsezadnje bolj zdrave pridelke in tla.
Z nadaljnjim napredkom preciznega kmetijstva pričakujemo še tesnejše povezovanje vzorčenja tal z analitiko v realnem času in robotiko. Zaenkrat že osnovno avtomatizirano načrtovanje daje pomembno prednost: načrti, ki so prej trajali več ur, se lahko izvedejo v nekaj minutah, z zagotovilom, da se upošteva vsak kotiček polja. Za vsakega pridelovalca, ki ga zanima pametnejše upravljanje hranil, je razumevanje in uvedba avtomatiziranega načrtovanja vzorčenja tal ključni korak k večji učinkovitosti in trajnosti.
Podatki o tleh