Автоматизированное планирование отбора проб почвы - это современный метод точного земледелия, который использует программное обеспечение и алгоритмы для разработки оптимизированных схем отбора проб на сельскохозяйственных полях. Вместо того чтобы вручную выбирать места отбора образцов (например, проходя по полю по сетке или рисуя субъективные зоны), автоматизированные системы получают различные слои данных (карты, исторические урожаи, спутниковые снимки и т. д.) и рассчитывают, где нужно взять почвенные керны.
Одним словом, он заменяет большую часть догадок и ручного труда наукой, основанной на данных. Современные инструменты позволяют “за считанные минуты построить план отбора проб почвы на одном или многих полях”, выбирая варианты отбора проб по сетке или зонам и используя “умные алгоритмы [для] размещения точек и прокладки маршрута”. Цель состоит в том, чтобы точно зафиксировать изменчивость почвы, минимизировав при этом время, затраты и трудозатраты в поле.
Чем она отличается от традиционной выборки?
Традиционные методы отбора проб часто предполагают деление поля на равные ячейки (сетчатый отбор проб) или эвристические зоны, а затем сбор фиксированного количества кернов в каждой из них. Например, при отборе проб по сетке поле разбивается на регулярные ячейки (часто 1-5 акров) и в каждой ячейке берутся почвенные керны. Несмотря на широкое применение, это может означать сотни проб и очень высокие трудозатраты: равномерно расположенная сетка может дать большое количество проб, что увеличивает время и затраты на сбор и лабораторные работы.
Аналогичным образом, зональная выборка опиралась на суждения агронома при составлении карт “зон хозяйствования” (участков, которые считались схожими), но это было субъективно и могло упустить скрытые закономерности. В отличие от этого, автоматизированное планирование использует данные (например, карты урожайности, почвенные обследования, спутниковые снимки NDVI или сканирование электропроводности) для выявления истинных закономерностей изменчивости. По сути, это позволяет компьютерам определять, где следует брать небольшие почвенные керны, чтобы итоговые лабораторные тесты наилучшим образом отражали ситуацию на поле.
Основная цель автоматизированного планирования отбора проб почвы проста: максимизировать качество данных и понимание при минимизации усилий и затрат. Хороший отбор проб фиксирует реальную изменчивость поля, что позволяет впоследствии точно вносить удобрения или известкование. В то же время отбор тысяч ненужных проб - это расточительство. Автоматизированное планирование ищет статистическую “точку опоры” - достаточно точек для точного картирования плодородия, но не больше, чем нужно.
На практике это означает высокую точность данных и практические результаты при минимальных затратах времени и средств. Например, одно из недавних исследований показало, что группировка полей в однородные хозяйственные зоны позволила фермерам сократить количество необходимых проб почвы на 50-75% без потери информации.
Такое повышение эффективности напрямую способствует росту прибыли и снижению воздействия на окружающую среду. Исследователи сельского хозяйства подчеркивают, что точное управление почвой (включая тщательный отбор проб) может повысить производительность и сократить количество отходов, что крайне необходимо, поскольку население планеты к 2050 году приблизится к 10 миллиардам человек.
Основные компоненты автоматизированной системы планирования почв
Согласно последним исследованиям, посвященным внедрению точного земледелия, более 40% крупных фермерских хозяйств по всему миру сообщают об использовании передовых слоев данных, таких как спутниковые снимки или карты электропроводности почвы, в рамках своей повседневной деятельности (данные 2024 года). В 2023 году мировой рынок точного земледелия превысит 10 миллиардов долларов США, а объем услуг, связанных с почвой и данными, будет расти почти на 12% в год.
Эти факты подчеркивают, что описанные ниже основные компоненты являются не теоретическими, а все более распространенными инструментами на современных фермах. Автоматизированный планировщик отбора проб почвы обычно состоит из трех частей:
- входные данные,
- алгоритмы анализа и
- результаты/поставки.
Каждая из этих частей позволяет превратить необработанные полевые данные в готовый к использованию план отбора проб.
A. Ввод и интеграция данных
Программное обеспечение для автоматизированного планирования использует различные полевые данные. Обычные входные данные включают:
1. Геопространственные карты: Они сообщают компьютеру, где и как физически изменяется поле. Примерами могут служить цифровые границы полей (часто в виде шейп-файлов или файлов KML) и модели топографии/высоты (данные DEM). Высота над уровнем моря влияет на влажность почвы и распределение питательных веществ, поэтому планировщики часто по-разному оценивают высокие и низкие участки. Если есть возможность, можно также использовать слои ГИС фермерских хозяйств, например, существующие зоны хозяйствования.

2. Данные исторических испытаний почвы: Результаты прошлого анализа почвы (например, карты pH, азота, фосфора, калия, органического вещества) чрезвычайно ценны. Они напрямую показывают, где почва обладает низким или высоким плодородием. Планировщики могут импортировать результаты предыдущих анализов в виде карт или электронных таблиц. Если ферма проводила анализы в течение многих лет, эта история поможет адаптировать план к известным проблемным местам.
3. Карты урожайности: Во многих хозяйствах сохранились мониторы урожайности комбайнов за предыдущие сезоны. Слои, показывающие, какие участки поля постоянно дают высокие или низкие урожаи, могут указывать на глубинные различия в почве. Например, участки поля, которые всегда были малоурожайными, могут быть бедны питательными веществами; для поиска таких участков специалисты по планированию выборочной совокупности используют карты частоты урожайности. Рекомендуется объединять данные об урожайности за несколько лет, чтобы необычная погода в один год (наводнение, засуха) не исказила план.
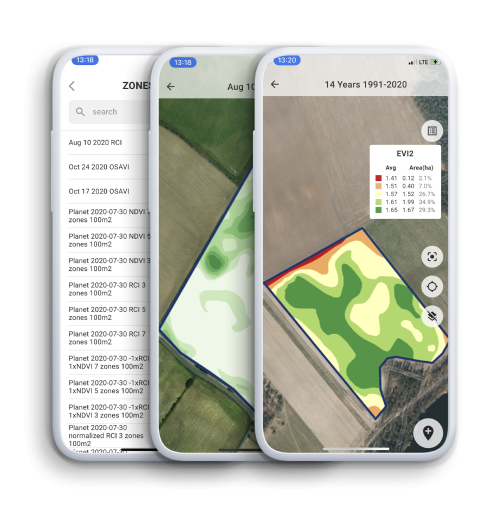
4. Данные дистанционного зондирования: Спутниковые снимки или снимки, сделанные с помощью беспилотников, неоценимы для выявления невидимых невооруженным глазом закономерностей. Такие индексы растительности, как NDVI (Normalized Difference Vegetation Index) или NDRE, фиксируют энергичность растений, часто отражая плодородие или влажность почвы. Карта NDVI, составленная летом без облаков, может выделить зоны стабильно лучшего или худшего роста урожая. Многие планировщики также используют мультиспектральные изображения, полученные с воздуха или беспилотников. Кроме того, карты датчиков ближнего действия, такие как электромагнитная проводимость (ECa), дают информацию о текстуре почвы и содержании солей, которые часто коррелируют с плодородием.
На практике хорошие планировщики позволяют пользователям импортировать или связывать любые из этих слоев. Например, облачный инструмент может позволить фермеру загрузить шейпфайл границ поля, а затем наложить на него изображение NDVI и карты урожайности для того же поля. Затем программа анализирует их вместе.
Как отмечается в одном из руководств, свойства почвы, такие как органический углерод, электропроводность (ECa), текстура почвы (песок/ил/глина), топография, аэрофотоснимки и такие индексы, как NDVI, оказались полезными при выделении хозяйственных зон. Благодаря объединению этих слоев данных в единую систему планировщик может “увидеть” общую картину изменчивости полей еще до выбора точек отбора проб.
B. Алгоритм и логика планирования
Алгоритмы лежат в основе автоматизированного отбора проб почвы. По состоянию на 2025 год, многие коммерческие платформы теперь интегрируют методы кластеризации машинного обучения, гибридные статистические модели или генерацию зон на основе PCA. Их эффективность часто проверяется путем перекрестной валидации с использованием скрытых почвенных данных, при этом пользователи сообщают об улучшении захвата дисперсии до 15-20% по сравнению со старыми методами. Ниже описано функционирование типичных методов:
1. Зональный (кластерный) отбор проб: Это наиболее распространенный метод. Система использует логику кластеризации на входных картах, чтобы разделить поле на отдельные зоны, которые внутренне схожи. Например, можно провести кластеризацию по методу k-means на объединенных слоях данных (например, урожайность+NDVI+почвенные данные), чтобы сформировать 3-6 “зон управления”. Поскольку предполагается, что каждая зона достаточно однородна, необходимо всего несколько образцов для каждой зоны.
Затем программное обеспечение распределяет точки отбора проб в пределах каждой зоны (часто в виде небольшой сетки или случайных точек), чтобы уловить оставшуюся изменчивость. Современные инструменты часто позволяют пользователю взвешивать различные слои данных или регулировать количество зон. Некоторые даже используют PCA (анализ главных компонент), чтобы сначала сократить объем данных, а затем кластеризовать результаты.

2. Выборка по сетке: В этом режиме программа просто накладывает регулярную сетку на поле и генерирует точку в центре каждой ячейки. Пользователь может задать размер ячейки (например, 1,5 акра) или общее количество точек. Планировщик также может адаптировать плотность сетки в условиях переменчивого рельефа: например, меньшие ячейки на холмах, где изменчивость выше, и большие ячейки на ровной местности. Преимуществом является равномерное покрытие без перекосов.
Недостатком является то, что очень мелкая сетка означает большое количество образцов, а крупная сетка может упустить детали. Автоматизированные системы могут помочь выбрать разумный интервал - например, исследования показывают, что сетка площадью 1 акр захватывает около 80% полевой изменчивости, в то время как сетка площадью 2,5 акра снижает точность до ~76%. Некоторые программы предоставляют информацию об ожидаемой точности или охвате на основе выбранной сетки.
3. Направленная (целевая) выборка: Некоторые поля имеют определенные известные проблемы (например, засоленные участки, низкоурожайные “мертвые зоны” или участки с уплотнением почвы). Автоматический планировщик может учесть их, поставив дополнительные баллы. Например, если спутниковые снимки или карта ЕС показывают очаг засоленности, пользователь может дать указание инструменту добавить пробы в этом районе. Это обеспечит более интенсивный отбор проб в проблемных районах.
4. Статистические проверки: В основе всех методов лежит статистическая база. Планировщики часто следят за тем, чтобы количество и расположение образцов соответствовало основным статистическим требованиям репрезентативности. Например, они могут проверить, что каждая зона имеет минимальную площадь или что выборки распределены так, чтобы избежать кластеризации.
Некоторые используют моделирование по методу Монте-Карло или пространственную статистику, чтобы убедиться, что план с большой вероятностью отражает изменчивость поля. Цель состоит в том, чтобы избежать необъективного отбора проб; автоматически генерируя точки, система устраняет распространенную проблему “выборки по принципу удобства” (отбор проб только там, где легко пройти) и вместо этого следует систематическим или случайным закономерностям, продиктованным данными.
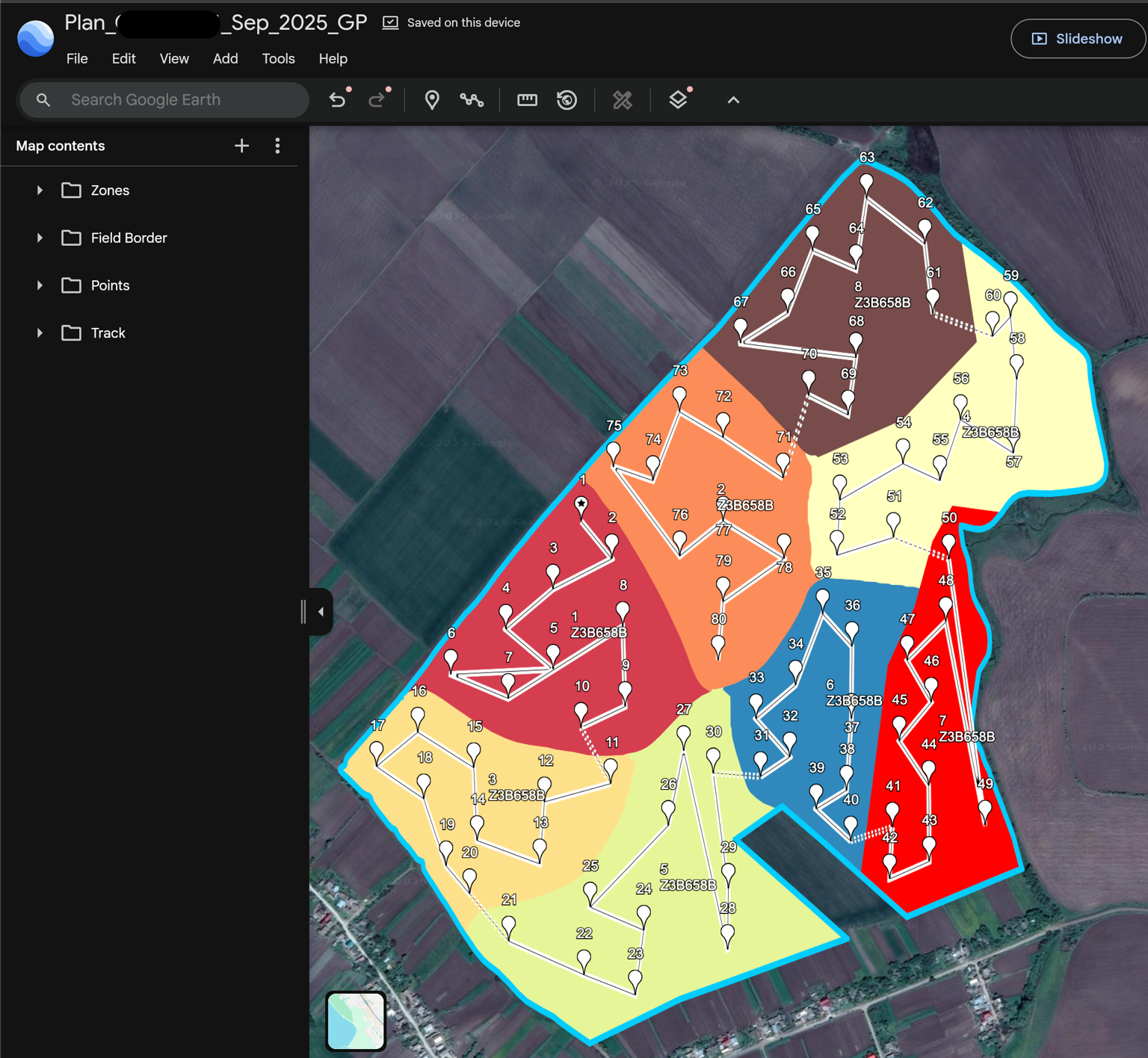
Во многих системах алгоритм запускается один раз после установки всех слоев и параметров. Например, облачное приложение может работать в течение нескольких секунд и выводить карту с красными и желтыми точками в каждой зоне (см. рисунок ниже). Эти точки представляют собой места, где необходимо взять почвенные керны.
Внутри программы могут использоваться обычные инструменты кластеризации (например, K-means, fuzzy c-means) или собственные эвристики для балансировки размещения точек. После определения зон многие инструменты используют простые геометрические схемы (например, стержневые линии или зигзаги) в пределах каждой зоны для распределения точек выборки.
C. Итоги и результаты
По результатам опросов 2024 года, более 70% пользователей услуг точного земледелия отметили, что автоматический экспорт (GPS-маршруты, лабораторные этикетки) является одной из наиболее ценимых функций. Беспрепятственный переход от плана к полю становится отличительной особенностью программного обеспечения для сельского хозяйства. Конечным результатом автоматизированного планирования отбора проб обычно является набор конкретных инструкций для полевой бригады, включая:
1. Карта точек отбора проб с географической привязкой: Обычно это карта (PDF, слой ГИС или маршрут мобильного приложения), на которой по GPS-координатам показано местоположение каждого почвенного керна. На ней могут быть обозначены цветные зоны и пронумерованные точки. Полевые техники используют эту карту на планшете или в распечатанном виде для навигации по полю. Некоторые системы даже экспортируют данные в популярные приложения GPS-NAV или в форматы (например, ISOXML), которые автоматически загружаются в гарнитуры точного земледелия.
2. Протокол/порядок отбора проб: Это письменное руководство, описывающее, как выполнить план. Обычно оно включает инструкции по плотности проб (например, “взять 5 кернов на зону”), глубине (например, 0-6 дюймов, 6-24 дюйма), необходимым инструментам для отбора проб и условным обозначениям. Можно указать, какие точки являются “керновыми” образцами (каждый из которых берется отдельно) или “составными” (несколько субкернов смешиваются). Программное обеспечение может генерировать этикетки или бирки для пакетов с уникальными идентификаторами, соответствующими каждой точке.
3. Шаблоны импорта данных: После того как образцы собраны и проверены в лаборатории, результаты необходимо повторно интегрировать в планировщик. Многие системы предоставляют шаблон Excel или CSV, в который результаты лабораторных исследований можно вносить строка за строкой (по одной строке на точку). Когда шаблон загружается обратно, программа автоматически соединяет данные о почве с координатами на карте. Таким образом, замыкается цикл, позволяющий мгновенно создавать карты свойств почв. Автоматические планировщики часто выполняют эту операцию без проблем, так что новые данные поступают непосредственно в ГИС или систему VRA (система внесения удобрений с переменной нормой расхода).
Эти результаты гарантируют, что план будет выполнен с минимальной путаницей и что данные будут готовы к принятию решений. Некоторые продвинутые инструменты даже автоматически печатают файлы GPS-навигации и этикетки. Ключевым моментом является интегрированный рабочий процесс: как только данные попадают в систему, планировщик выполняет всю тяжелую работу по анализу и просто передает четкие инструкции команде.
Автоматизированный рабочий процесс планирования отбора проб почвы (шаг за шагом)
К 2025 году крупнейшие поставщики программного обеспечения для точного земледелия сообщат, что более 60% их пользователей будут составлять планы отбора проб почвы в рамках рутинной работы. Многие фермеры теперь относятся к планированию отбора проб как к стандартному ежегодному этапу, а не как к специальному проекту. Такое растущее внедрение подчеркивает важность понимания рабочего процесса, описанного ниже. Типичный автоматизированный проект по отбору проб почвы следует четкой последовательности шагов. Часто они встроены в приложение для планирования в виде управляемого процесса:
i. Определите цели: Перед планированием пользователь должен указать, для чего он берет пробы. Нужно ли составить подробную карту питательных веществ для внесения удобрений с переменной нормой? Чтобы установить базовый уровень здоровья почвы? Исследовать очаг распространения болезни? Четкие цели (например, “Оптимизация зон внесения азотных удобрений” или “Проверка потребности в норме извести”) помогут сориентироваться в дальнейших настройках.

ii. Загрузка данных и выбор слоя: Затем пользователь загружает или выбирает слои пространственных данных для использования. Например: карта границ полей (обязательно), а также любые карты урожайности, почвенные исследования, изображения NDVI, модели рельефа и т. д. Часто программное обеспечение предварительно подключается к облачным данным (каталогам спутниковых снимков или прошлым данным фермы), поэтому пользователь просто нажимает, какие годы или слои включить.
iii. Установить параметры: Затем пользователь настраивает интенсивность выборки. Это может быть целевое количество точек на акр (например, 1 точка на 2 акра), желаемое количество зон (например, 3 зоны) или размер ячейки сетки. Пользователь также может выбрать тип выборки (сетка против зональной, керн против композита). Некоторые системы позволяют пользователю взвешивать слои (например, придавать дополнительный вес карте pH почвы при определении зон). Этот шаг позволяет откалибровать поведение алгоритма.
iv. Запуск алгоритма (генерация плана): Задав данные и параметры, планировщик выполняет анализ. За несколько секунд или минут он обрабатывает входные слои, выделяет зоны или сетки и размещает точки отбора проб. В результате получается проект плана. Современные системы могут показывать 2D-карту или 3D-вид плана.
v. Обзор и корректировка (по желанию): Затем пользователь просматривает план. Большинство программ позволяет щелкнуть по зонам или точкам, чтобы убедиться, что они выглядят разумно. При необходимости пользователь может вручную добавить или удалить точки (например, обойти недоступную влажную зону или добавить точку в недавно выявленный холодный участок). Некоторые планировщики позволяют смещать точки или объединять зоны на лету. Однако цель заключается в минимальной ручной настройке - в идеале первый проект системы должен быть продуманным.
vi. План экспорта и подготовка полевых работ: Наконец, готовый план экспортируется в нужные форматы. Карта отправляется на полевой прибор или устройство GPS. Печатаются этикетки и рабочий заказ. В этот момент полевые бригады могут выезжать на место и собирать именно те образцы, которые указаны в плане. Весь этап планирования, на который раньше у агронома уходили часы или даже дни, теперь сжимается до нескольких минут работы с программой.
Для крупных фермерских хозяйств или кооперативов этот процесс можно повторить в пакетном режиме. Многие платформы поддерживают многопольное планирование, то есть пользователь выбирает сразу несколько полей и составляет все планы отбора проб вместе. Это позволяет легко масштабировать планирование от одного опытного поля до сотен акров.
Основные преимущества автоматизированного планирования отбора проб почвы
Согласно последним отраслевым отчетам, фермы, использующие автоматизированное планирование, сократили время планирования отбора проб почвы на 80% или более, а многие сообщают о снижении затрат на отбор проб на 20-30% в первый же сезон. Эти реальные результаты отражают преимущества, описанные ниже. Автоматизированное планирование отбора проб почвы дает несколько основных преимуществ по сравнению с традиционными методами:
1. Гораздо более высокая эффективность: Благодаря автоматизации процесса проектирования то, на что раньше уходили часы или дни, можно сделать за считанные минуты. Когда все слои данных введены, программное обеспечение запускает алгоритм практически мгновенно. Например, одна из платформ рекламирует, что планы отбора проб для многих полей могут быть созданы “за считанные минуты”. Это значительно сокращает время работы техников и агрономов. На практике одно нажатие кнопки планировщика позволяет создать десятки точек отбора проб с точным GPS, заменяя трудоемкое ручное картирование.

2. Повышенная точность и объективность: Планы, основанные на данных, устраняют человеческую предвзятость. Традиционные карты зон, составленные на глаз, могут упустить скрытую изменчивость; автоматизированные зоны основаны на фактических данных измерений. Алгоритмы гарантируют, что точки отбора проб систематически охватывают все разнообразие поля. Как отмечает специалист MSU Extension, создание зон управления на основе данных “критически важно для обеспечения достоверности и точности результатов”, поскольку учитывает реальные пространственные вариации. Алгоритмы обеспечивают систематический охват разнообразия поля точками выборки.
3. Экономическая эффективность: Сосредоточив пробы там, где они важны, можно сократить общее количество кернов. Исследования показали, что правильные планы отбора проб по зонам могут сократить расходы на лабораторию, требуя на 50-75% меньше проб. Каждое лабораторное исследование почвы стоит денег, поэтому отказ от дублирующих или ненужных исследований позволяет сэкономить средства. Кроме того, сокращение полевого времени (меньше пеших прогулок) экономит рабочую силу и топливо для техники. Таким образом, автоматизированное планирование повышает рентабельность инвестиций в почвенное тестирование.
4. Улучшенная поддержка принятия решений: Качественный отбор проб приводит к более качественным назначениям удобрений и управленческим решениям. Например, используя пространственный отбор проб, фермеры могут варьировать внесение извести и питательных веществ по всему полю. Визуализация карт дефицита (полученных в результате плотного отбора проб) помогает “эффективно решать проблемные зоны” и “добиваться пространственного варьирования внесения питательных веществ”. Одним словом, более точные данные о почве позволяют более точно вносить P, K, известь и т. д., повышая урожайность или экономя затраты.
5. Масштабируемость: Автоматические планировщики легко масштабируются. Они могут работать как с одним небольшим полем, так и с десятками полей без дополнительных усилий. Функции работы с несколькими полями позволяют консультанту загрузить 100 полей и автоматически сгенерировать 100 планов. Это хорошо подходит для крупных ферм или сельскохозяйственных служб, предлагающих масштабное тестирование почвы. По мере роста фермерских хозяйств можно использовать тот же рабочий процесс, не прибегая к ручному труду.
Автоматизированное планирование превращает отбор проб почвы из обременительной работы в упорядоченный процесс обработки данных. Это позволяет фермерам и агрономам быстрее и дешевле получать более качественные почвенные карты, что, в свою очередь, повышает эффективность удобрения сельскохозяйственных культур и управления земельными ресурсами.
Как программное обеспечение GeoPard помогает в автоматизированном планировании отбора проб почвы?
Программное обеспечение GeoPard обеспечивает автоматизацию, интеллектуальность и простоту процесса отбора проб почвы. Разработанное для фермеров, агрономов, почвенных лабораторий, розничных продавцов и дилеров, программное обеспечение GeoPard помогает создавать оптимизированные планы отбора проб почвы с помощью программного обеспечения всего за несколько минут - как для одного поля, так и для целой фермы. С помощью Учебник по программному обеспечению для отбора проб грунта GeoPard, Вы можете выбирать между отбором проб по сетке или по зонам, выбирать керновые или композитные методы, а алгоритмы на основе искусственного интеллекта автоматически размещают точки отбора проб, рассчитывают маршруты, печатают этикетки и экспортируют готовые к использованию карты.
1. Более разумное планирование, быстрые результаты
Рабочий процесс программного обеспечения GeoPard позволяет легко и эффективно планировать отбор проб почвы:
- Начните новый план - Выберите одно или несколько полей или скопируйте настройки из прошлых планов для единообразия.
- Тип выборки - Выберите выборку на основе сетки для равномерного охвата или выборку на основе зон, чтобы сосредоточиться на изменчивости полей.
- Установить стиль образца - Для экономии можно использовать композитный материал или взять керн для детального анализа почвы.
- Настройка точек и траектории - Интеллектуальная логика GeoPard размещает точки, используя адаптивные алгоритмы, такие как Smart Recommendation, Core Line, N/Z или W.
- Оптимизация маршрутизации - Выберите Smart Optimal Path для автоматических пробоотборников или Zone-by-Zone routing для ручных команд.
- Печать и экспорт - Печать пользовательских этикеток и экспорт планов в формате KML или Shapefile для GPS-навигации.

2. Интеллектуальные функции, которые экономят время
Программное обеспечение GeoPard, управляемое искусственным интеллектом, автоматически адаптируется к форме, изменчивости и данным каждого месторождения. Вы можете контролировать размер сетки, количество точек на зону, глубину пробы и углы поворота, обеспечивая точное и эффективное покрытие пробами.
Планирование на нескольких полях позволяет консультантам или крупным фермерским хозяйствам составлять несколько планов отбора проб почвы за один раз, сохраняя последовательность в разные сезоны и регионы.
3. Выполнение планов в полевых условиях с помощью GeoPard Mobile
Мобильное приложение GeoPard позволяет полевым группам беспрепятственно проводить отбор проб. Вы можете просматривать карты, перемещаться к каждой точке и отмечать пробы как завершенные - даже в автономном режиме. Приложение также поддерживает отслеживание в режиме реального времени, ведение заметок и печать этикеток непосредственно с мобильных устройств.
4. Простая маркировка и экспорт
GeoPard упрощает маркировку с помощью автоматических шаблонов, основанных на зонах или точках. Пользователи могут загрузить и распечатать готовые этикетки в формате PDF для мешков с грунтом или лабораторных образцов, обеспечивая отслеживание каждого керна. Планы и маршруты также можно экспортировать в навигационные приложения, обеспечивая бесперебойное выполнение работ от планирования до доставки в лабораторию.
5. Почему профессионалы выбирают программное обеспечение для отбора проб почвы GeoPard
- Скорость: Постройте планы отбора проб почвы за несколько минут.
- Точность: Интеллектуальные алгоритмы оптимизируют каждую точку отбора проб.
- Гибкость: Поддерживает отбор проб по сетке и по зонам, керновые и композитные методы.
- Масштабируемость: Планируйте одно поле или сотни.
- Эффективность полей: Автономная навигация и отслеживание прогресса в реальном времени.
GeoPard превращает отбор проб грунта в упорядоченный рабочий процесс, основанный на данных. Благодаря искусственному интеллекту планирования, интеллектуальной маршрутизации и интегрированным мобильным инструментам он помогает пользователям собирать более надежные данные о почве - быстрее и стабильнее. Это делает автоматизированное планирование отбора проб почвы более разумным, быстрым и готовым к будущему точного земледелия.
Практические соображения по внедрению
Исследование, проведенное в 2025 году, показало, что более 30% неудачных проектов в области точного отбора проб были вызваны низкой целостностью данных или несоответствием между программным и аппаратным обеспечением. Это подчеркивает, насколько важны следующие практические моменты при внедрении автоматизированного планирования отбора проб. Несмотря на очевидные преимущества, успешное использование автоматизированного планирования отбора проб зависит от нескольких ключевых практических факторов:
1. Качество данных имеет решающее значение: Мусор внутрь, мусор наружу. Автоматизированный план может быть настолько хорош, насколько хороши введенные в него данные. Если на картах урожайности есть ошибки GPS или слой почвенного обследования устарел, полученные зоны могут ввести в заблуждение. Специалисты по точному земледелию подчеркивают необходимость тщательного управления данными: всегда собирайте и калибруйте исходные данные.

Например, плохая калибровка монитора урожайности или неправильная маркировка полей могут впоследствии привести к неправильным рецептам. В одной из статей, посвященных распространению знаний, фермерам прямо напоминают: “Все мы слышали фразу ‘мусор в дом, мусор из дома’. Неточные или плохие данные могут иметь последствия в течение многих лет”. Другими словами, потратьте время на очистку и проверку исходных данных, прежде чем запускать автоматизированные планы.
2. Программное обеспечение и платформы: Эти инструменты представлены в различных формах. Некоторые из них являются отдельными настольными ГИС-программами, другие - облачными или мобильными приложениями. Многие облачные платформы для точного земледелия (например, Trimble Ag Software, Climate FieldView, FarmLogs или специализированные инструменты, такие как GeoPard или AgLeader SMS) теперь включают модули автоматического отбора проб.
Фермеры или консультанты должны выбрать платформу, которая хорошо интегрируется с существующими системами. Она должна импортировать данные в распространенных форматах (шейп-файлы, урожайность .csv, снимки), а также экспортировать их в GPS-навигаторы или картографические приложения. Также обратите внимание на стоимость/подписку: некоторые сервисы взимают плату за план или за акр.
3. Совместимость с аппаратным обеспечением и экспортом: План полезен только в том случае, если пробоотборщик может ему следовать. Убедитесь, что формат выходных данных (карты, GPS-файл или данные приложения) работает с вашими полевыми устройствами. Многие системы экспортируют данные непосредственно в мобильные планшеты или инструменты RTK-GPS. Другие могут предоставлять KML или шейп-файлы, которые можно загружать в общие навигационные приложения. Проверьте, соответствуют ли этикетки и листы данных тому, что ожидает ваша почвенная лаборатория. По сути, вся цепочка - от планирования до отбора проб и лабораторного анализа - должна быть взаимосвязана.
4. Интеграция в рабочий процесс точного земледелия: Отбор проб почвы - один из этапов большого цикла точного земледелия. После планирования (план) следует отбор проб (выполнение полевых работ) → анализ (отправка кернов в лабораторию, получение результатов) → предписание (использование данных для составления карт внесения удобрений) → применение (внесение удобрений с переменной нормой на поле). Автоматизированное планирование должно плавно вписаться в этот цикл.
Например, после получения результатов данные должны быть подключены к программному обеспечению для управления питательными веществами или инструментам для внесения удобрений VR. Хорошее программное обеспечение для планирования часто интегрируется с этими системами. MSU Extension отмечает, что после отбора проб визуализация результатов позволяет эффективно их применять: например, фермеры могут варьировать нормы извести или удобрений в разных зонах на основе лабораторных карт.
5. Обучение и привлечение пользователей: Наконец, внедрение автоматизированного планирования означает доверие к технологии. Руководителям хозяйств и агрономам может потребоваться обучение, чтобы понять, как формируются зоны. Разумно начать с пилотных испытаний: запустить автоматизированный план параллельно с проверенным ручным планом на одном поле и сравнить результаты.
Со временем, когда пользователи увидят, как экономится время и (в идеале) улучшается согласованность, доверие к ним возрастет. Во многих случаях садоводы обнаруживают, что объективно выведенные зоны часто совпадают с их интуицией, но на их создание уходит гораздо меньше усилий.
Будущие тенденции в области автоматизированного отбора проб
По прогнозам, к 2025 году совокупный рынок автономных полевых роботов и инструментов для точного планирования почвы превысит 1,2 миллиарда долларов США, причем рост будет расти двузначными числами в год. Параллельно с этим первые испытания показывают, что роботы-пробоотборники могут попадать в точки GPS с погрешностью <10 см, превосходя ручные бригады в условиях густой растительности. Эти сигналы указывают на то, куда движется отрасль. Область отбора проб почвы продолжает стремительно развиваться. Даже помимо автоматизированных алгоритмов планирования, мы видим на горизонте несколько интересных тенденций:
1. ИИ и машинное обучение: Помимо простой кластеризации, применяются передовые методы ИИ. Например, исследователи разрабатывают инструменты, использующие глубокое обучение на исторических спутниковых снимках для прогнозирования состояния почвы и предложения точек отбора проб. Университет штата Миссисипи участвует в проекте 11 институтов, финансируемом USDA-NIFA, по разработке “Спутникового дизайна отбора проб почвы” (S3DTool).
Эта система будет использовать алгоритм глубокого обучения на многолетних спутниковых снимках, чтобы автоматически рекомендовать места отбора проб, по сути, обучаясь на основе прошлых спутниковых данных, какие области нуждаются в отборе проб. В случае успеха такие инструменты на основе ИИ могут сделать планирование еще более автономным и прогнозируемым, учитывая тонкие закономерности в погоде и урожае с течением времени.
2. Датчики реального времени и проксимальные датчики: Исследователи и компании изучают возможность использования датчиков "на ходу", которые могут уменьшить потребность в физических стержнях. Например, оптические датчики, установленные на оборудовании, могут непрерывно измерять отражательную способность культур или почвы. Датчики электропроводности, буксируемые по полю, могут создавать карты текстуры почвы на лету.
В будущем возможно, что сеялка или опрыскиватель будут оснащены почвенными зондами, которые автоматически берут пробы по мере движения. Эти данные могут напрямую поступать в систему планирования (или даже заменять дискретные керны) для практически непрерывного картирования почвы. Как отмечается в одном из блогов, посвященных точному земледелию, у нас уже есть такие датчики, как Greenseeker или Veris EC, которые создают очень точные карты - тенденция состоит в том, чтобы соединить их с аналитикой в реальном времени.
3. Автономный роботизированный отбор проб: Помимо планирования, появляются полностью автономные пробоотборники. Вместо техника с зондом некоторые фермы будут использовать роботизированные транспортные средства для сбора кернов точно в запланированных точках GPS. Такие компании, как RogoAg, уже выпускают на рынок самоходные пробоотборники почвы с RTK-GPS-навигацией, позволяющей каждый раз точно попадать в точку (в ходе полевых испытаний роботизированные пробоотборники достигли более высокой точности и последовательности, чем операторы-люди).
Когда такие роботы станут распространенными, рабочий процесс отбора проб может стать по-настоящему "ручным": автоматизированный план → развертывание робота → автоматизированный сбор керна → маркировка образцов. Это значительно повысит производительность почвенного тестирования. Хотя робототехника (для прополки, разведки и т. д.) все еще является новинкой, экспертные опросы показывают, что она растет, и отбор проб почвы - естественный вариант для автоматизации, поскольку каждое местоположение керна - это точка GPS.
4. Интегрированные платформы принятия решений: Наконец, мы ожидаем, что планирование отбора проб станет одной из составляющих все более крупных интегрированных систем управления фермой. Будущие платформы могут не только разрабатывать точки отбора проб, но и сразу же анализировать полученные данные, связываться с рынками удобрений, прогнозами погоды и агрономическими моделями.
Например, одна из концепций - это система, которая отслеживает тенденции состояния почвы из года в год, автоматически регулируя интенсивность отбора проб в зависимости от прошлых тенденций или риска урожая. Для этого потребуются конвейеры данных - аналитика на основе искусственного интеллекта, облачные вычисления и подключение к IoT. Одним словом, “умная ферма” завтрашнего дня будет рассматривать отбор проб почвы как непрерывный автоматизированный процесс, интегрированный со всем, начиная от GPS-тракторов и заканчивая потоком погодных данных.
Заключение
Автоматизированное планирование отбора проб почвы представляет собой мощную конвергенцию сельского хозяйства и науки о данных. Благодаря использованию ГИС, датчиков и интеллектуальных алгоритмов, отбор проб почвы превращается из утомительной работы в быстрый, точный и масштабируемый процесс. Фермеры и агрономы, использующие эти инструменты, могут получать более точные данные о плодородии почвы, экономя при этом трудозатраты и средства. На практике это означает более богатые почвенные карты, более целенаправленное внесение удобрений и, в конечном счете, более здоровые культуры и почвы.
По мере развития точного земледелия мы ожидаем еще более тесной интеграции отбора проб почвы с аналитикой и робототехникой в режиме реального времени. Пока же даже базовое автоматизированное планирование дает значительное преимущество: планы, на которые раньше уходили часы, можно составлять за считанные минуты, с уверенностью, что учтен каждый участок поля. Для любого сельхозпроизводителя, заинтересованного в более рациональном использовании питательных веществ, понимание и внедрение автоматизированного планирования отбора проб почвы - ключевой шаг на пути к повышению эффективности и устойчивости.
Данные о почве