Brezpilotna letala (UAV) ali droni spreminjajo sodobno kmetijstvo, saj omogočajo hitre posnetke polj iz zraka. Uporabljajo se za skeniranje zdravja pridelkov, stopnje rasti, škodljivcev, plevela in oceno pridelka. Kitajska ima na primer zdaj v uporabi več kot 250.000 kmetijskih dronov, na Tajskem pa je bilo do leta 2023 s škropljenjem ali spremljanjem z droni pokritih približno 30% kmetijskih zemljišč. Ti brezpilotni letalniki povečujejo učinkovitost kmetijstva, saj hitro odkrivajo težave (kot so izbruhi škodljivcev ali pomanjkanje vode), ki jih je mogoče spregledati na terenu.
Vendar pa imajo majhni brezpilotni letalniki zelo omejeno računalniško moč in življenjsko dobo baterije. Zato je izvajanje kompleksnih algoritmov umetne inteligence na njih v realnem času izziv. Tradicionalni lahki modeli za zaznavanje objektov (kot so drobni detektorji YOLO ali MobileNet) lahko le delno zadovoljijo te potrebe: pogosto žrtvujejo natančnost ali hitrost in zahtevajo znatno ročno nastavitev. Ta vrzel spodbuja iskanje nevronske arhitekture (NAS), ki se zaveda namestitve: avtomatizirano metodo načrtovanja, ki prilagaja modele globokega učenja natančnim zahtevam brezpilotnih letalnikov, nameščenih na terenu.
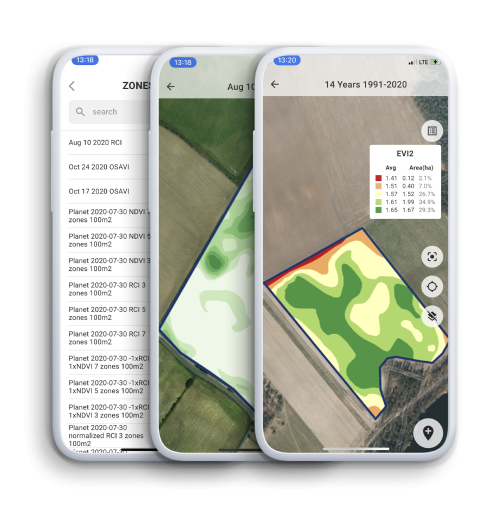
Sodobno precizno kmetijstvo uporablja brezpilotne letalnike (UAV) za pregledovanje polj in spremljanje stanja pridelkov. Z letenjem nad velikimi območji lahko brezpilotni letalniki zbirajo slike visoke ločljivosti rastlin, tal in vzorcev na poljih. Te slike se posredujejo algoritmom računalniškega vida, ki zaznavajo plevel med pridelki, ocenjujejo pridelek (npr. štetje plodov ali glavic) ali opazijo zgodnje znake bolezni ali pomanjkanja hranil. Brezpilotni letalniki na primer omogočajo ciljno škropljenje s herbicidi na plevelnih površinah, kar zmanjšuje uporabo kemikalij in stroške.
Vendar pa majhni vgrajeni računalniki v dronih (pogosto omejeni na nekaj vatov moči) težko poganjajo velike nevronske mreže pri hitrosti leta. Zaradi tega je težko izvajati analize v realnem času: če dron opazi težavo, se mora hitro odzvati ali zabeležiti podatke, preden se baterija izprazni. Trenutni lahki detektorji (npr. YOLOv8 nano, YOLO-tiny, MobileNets) so zasnovani ročno in pogosto vključujejo kompromise: zmanjšanje modela pospeši postopek, vendar lahko zmanjša natančnost.
Posledično obstaja velika potreba po metodah, ki samodejno najdejo najboljši možni model glede na omejitve brezpilotnega letalnika. NAS, ki se zaveda namestitve, ustreza tej potrebi z iskanjem arhitektur nevronskih mrež, ki skupaj optimizirajo natančnost zaznavanja in porabo virov (latenca, moč, pomnilnik) v dejanskih pogojih brezpilotnega letalnika. Ta pristop lahko zagotovi specializirane modele, ki učinkovito delujejo na strojni opremi brezpilotnih letalnikov, hkrati pa ostanejo zelo natančni za naloge spremljanja pridelkov.
Zahteve za zaznavanje objektov brezpilotnih letalnikov pri spremljanju poljščin
Kmetijski brezpilotni letalniki opravljajo vrsto nalog vizualnega zaznavanja, od katerih ima vsaka svoje zahteve:
1. Zdravje pridelka in zaznavanje stresa: Droni uporabljajo RGB, termalne ali multispektralne kamere za prepoznavanje obremenjenih rastlin, pomanjkanja hranil ali simptomov bolezni. Algoritmi v realnem času lahko preslikajo variabilnost polja in usmerjajo namakanje ali gnojenje. Natančno zaznavanje znakov stresa rastlin omogoča pravočasne posege za ohranitev pridelka.
2. Identifikacija plevela: Zaznavanje plevela med pridelki omogoča kmetom, da škropijo le neželene rastline, s čimer prihranijo herbicide. Na primer, študija na bombažnih poljih je uporabila posnetke brezpilotnega letalnika z detektorjem na osnovi YOLOv7 in dosegla natančnost približno 83% pri ločevanju plevela od bombaža. Vendar pa je razlikovanje vizualno podobnih plevelov in pridelkov še vedno težko na prenatrpanih slikah polj.

3. Odkrivanje škodljivcev in bolezni: Brezpilotni letalniki (UAV) lahko odkrijejo izbruhe (npr. kobilice, žuželke ali glivično ogorčenje) prej kot ljudje peš. Droni podpirajo tudi kartiranje območij, okuženih s škodljivci, z multispektralnim slikanjem, ki izboljša samo RGB. Hitro in natančno zaznavanje škodljivcev je ključnega pomena za preprečevanje širjenja.
4. Ocena pridelka: Štetje sadja, žitnih glav ali rastlin iz zraka pomaga napovedati količino pridelka. Modeli, usposobljeni za zaznavanje jabolk, melon ali pšeničnih glav na slikah brezpilotnih letalnikov, lahko pospešijo oceno pridelka. Na primer, nevronske mreže na slikah brezpilotnih letalnikov so bile uporabljene za štetje pridelka lubenic in melon na poljih.
5. Geodetske meritve in kartiranje: Droni ustvarjajo tudi zemljevide polj (topografija, razlike v tleh), ki pomagajo pri načrtovanju gojenja. Čeprav to ni strogo zaznavanje objektov, je to del spremljanja z brezpilotnimi letalniki.
Te naloge pogosto zahtevajo sklepanje v skoraj realnem času: dron, ki leti nad polji, bo morda moral sproti obdelovati video posnetke (več posnetkov na sekundo), da se lahko odločitve o nadzoru (kot sta prilagajanje višine ali aktiviranje škropilnice) sprejmejo takoj. V drugih primerih so lahko sprejemljive manjše zamude (v nekaj sekundah), če se podatki zabeležijo in analizirajo po pristanku.
Pomembno je, da mora vid brezpilotnega letalnika (UAV) obvladovati okoljske spremenljivosti: močno sončno svetlobo, sence, zamegljenost zaradi gibanja zaradi vetra, zakritje s prekrivajočimi se listi ali spremembe nadmorske višine in kota. Velikosti objektov se razlikujejo (bližnji plevel v primerjavi z oddaljenimi skupinami škodljivcev), zato morajo detektorji obvladovati večstopenjske značilnosti.
Končno, misije kmetijskih brezpilotnih letalnikov vključujejo stroge kompromise med natančnostjo, zakasnitvijo in energijo. Visoka natančnost zaznavanja je potrebna, da se prepreči spregledanje plevela ali škodljivcev, vendar lahko delovanje zelo globokega omrežja hitro izprazni baterijo. Model zaznavanja mora biti zato hiter in energetsko učinkovit, hkrati pa dovolj natančen za nalogo. Te stroge zahteve poudarjajo, zakaj je za brezpilotne letalnike v kmetijstvu potrebna specializirana zasnova modelov.
Lahki detektorji predmetov za platforme brezpilotnih letalnikov
Lahki detektorji objektov so nevronske mreže, posebej zasnovane za delovanje na omejeni strojni opremi. Pogosto uporabljajo majhne hrbtenice (kot sta MobileNet ali ShuffleNet), zmanjšane širine plasti ali poenostavljene zasnove vratu/glave. Na primer, modeli družine YOLO vključujejo “nano” in “drobne” različice (npr. YOLOv8n, YOLOv5s), ki imajo manj parametrov in zahtevajo manj operacij (FLOP).
Takšni detektorji lahko delujejo s hitrostjo več deset sličic na sekundo na vgrajeni strojni opremi, kot sta NVIDIA Jetson Nano ali Google Coral. Ag-YOLO je bil na primer detektor po meri, ki je temeljil na YOLO za palmove nasade in je deloval s hitrostjo 36,5 sličic na sekundo na Intel Neural Compute Stick 2 (s porabo le 1,5 W) in dosegel visoko natančnost (F1 = 0,9205). Ta model je uporabil približno 12× manj parametrov kot YOLOv3-Tiny, hkrati pa je podvojil svojo hitrost.

Ti primeri prikazujejo kompromise pri načrtovanju modelov: zmanjšanje velikosti ali kompleksnosti modela (npr. manj plasti ali kanalov) običajno pospeši sklepanje in zmanjša porabo energije, vendar lahko zmanjša natančnost. Ag-YOLO je žrtvoval nekaj zmogljivosti za povečanje hitrosti in učinkovitosti, vendar je pri svoji nalogi še vedno ohranil visok rezultat F1 0,92.
Podobno so bile tri različice YOLOv7 primerjane pri zaznavanju plevela: polna YOLOv7 je dosegla natančnost 83%, medtem ko je manjša mreža YOLOv7-w6 padla na natančnost 63%. To ponazarja omejitev generičnih lahkih detektorjev: modeli, uglašeni za eno okolje ali vrsto predmeta, lahko v drugem delujejo slabše. Detektor, ki je zožen zaradi hitrosti, lahko spregleda subtilne znake (npr. majhen ali prikrit plevel), kar škoduje robustnosti v različnih pogojih.
V kmetijstvu ta generična lahka omrežja morda niso optimalna brez nadaljnjih prilagoditev. Na primer, model YOLOv7, ki je bil predhodno usposobljen na običajnih naborih podatkov, morda ne bo popolnoma obvladoval edinstvenih tekstur in meril posnetkov poljščin. Zato je potrebna optimizacija arhitekture modela glede na nalogo in platformo. Ročno nastavljanje (spreminjanje plasti, filtrov itd.) za vsako novo vrsto drona ali sorto poljščin je delovno intenzivno. To spodbuja avtomatizirane metode – kot je NAS, ki se zaveda namestitve – da najdejo najboljše ravnovesje med velikostjo, natančnostjo in robustnostjo za dano platformo UAV in kmetijsko aplikacijo.
Iskanje nevronske arhitekture v sistemih vida na osnovi brezpilotnih letalnikov
Iskanje nevronske arhitekture (NAS) je avtomatizirana metoda za načrtovanje arhitektur nevronskih mrež. Namesto ročnega določanja števila plasti, filtrov in povezav NAS uporablja algoritme (učenje z okrepitvijo, evolucijske metode ali iskanje na osnovi gradientov) za raziskovanje prostora možnih zasnov in iskanje tistih, ki optimizirajo izbrani cilj (kot je natančnost).
NAS se je že uporabljal za ustvarjanje mobilno prijaznih omrežij. Na primer, Googlov MnasNet je bil pionirski NAS, ki se zaveda platforme in je v cilj neposredno vključil dejansko zakasnitev naprave. MnasNet je na telefonu Google Pixel za vsak kandidatni model med iskanjem izmeril čas sklepanja in uravnotežil natančnost glede na to izmerjeno zakasnitev. Rezultat je bila družina CNN, ki so bile hitre in natančne na mobilni strojni opremi ter so prekašale ročno zasnovane modele MobileNet in NASNet na ImageNet.
Vendar pa se generični pristopi NAS, kot je MnasNet, osredotočajo na splošne naloge vida (klasifikacija ImageNet ali zaznavanje COCO) in splošno strojno opremo (npr. mobilne telefone). Pri spremljanju pridelkov z brezpilotnimi letalniki (UAV) je problem bolj specializiran. Želimo detektorje, optimizirane za specifične razrede objektov (rastline, plevel, škodljivci) in prilagojene senzorjem in profilu leta brezpilotnega letalnika. Standardni NAS, ki optimizira le natančnost ali generično zakasnitev, lahko spregleda nianse, kot so zaznavanje majhnih objektov ali energijske omejitve.
Tudi tradicionalne metode NAS so lahko računsko zelo drage (pogosto zahtevajo več dni na velikih gručah GPU), kar ni vedno praktično za raziskovalce v kmetijstvu. Zato so za vid brezpilotnih letalnikov potrebni ogrodji NAS, specifični za nalogo. Ta morajo vključevati merila, pomembna za brezpilotne letalnike, in biti čim bolj učinkovita.
V vseh primerih je zavedanje omejitev ključnega pomena: NAS se mora zavedati omejitev ciljne naprave (podobno kot MnasNet) in zahtev nalog brezpilotnega letalnika med letom v realnem času. Če je iskanje prepočasno ali ne upošteva porabe energije, nastali model morda dejansko ne bo dobro deloval na terenu.
V praksi bi NAS za vid brezpilotnih letalnikov vključil zakasnitev strojne opreme in energijo neposredno v metriko iskanja. Na primer, lahko bi izmerili hitrost sličic kandidatnega detektorja na dejanskem računalniku drona (kot je NVIDIA Jetson) in to uporabili kot rezultat. To je v nasprotju z uporabo preprostih posrednikov, kot so FLOP-i, ki ne zajamejo hitrosti v resničnem svetu.
S tem lahko NAS odkrije arhitekture, ki najbolje izkoriščajo zmogljivosti naprave. Skratka, NAS ponuja način za samodejno načrtovanje detektorjev za brezpilotne letalnike, vendar ga je treba prilagoditi tako, da upošteva naloge, specifične za brezpilotne letalnike, in zahteve glede učinkovitosti.
NAS, ki upošteva uvajanje: Osnovna načela
NAS, ki se zaveda uvedbe, razširja NAS, ki se zaveda strojne opreme, tako da v proces načrtovanja vključuje kontekst uvedbe in okoljske omejitve. Z drugimi besedami, ne upošteva le strojne opreme drona (hitrost CPE/GPU, omejitve pomnilnika, energijska poraba), temveč tudi to, s čim se bo brezpilotni letalnik dejansko srečal na terenu. To pomeni eksplicitno optimizacijo za metrike, kot so zakasnitev sklepanja na ciljni napravi, poraba energije in pomnilniški odtis, hkrati pa si prizadeva za visoko natančnost zaznavanja.
Na primer, med NAS bi lahko vsak kandidatni model namestili na Jetson Nano, pritrjen na brezpilotni letalnik, in zabeležili njegov čas sklepanja in porabo energije v resničnem svetu. Te empirične povratne informacije pomagajo pri iskanju modelov, ki resnično izpolnjujejo merila za namestitev.
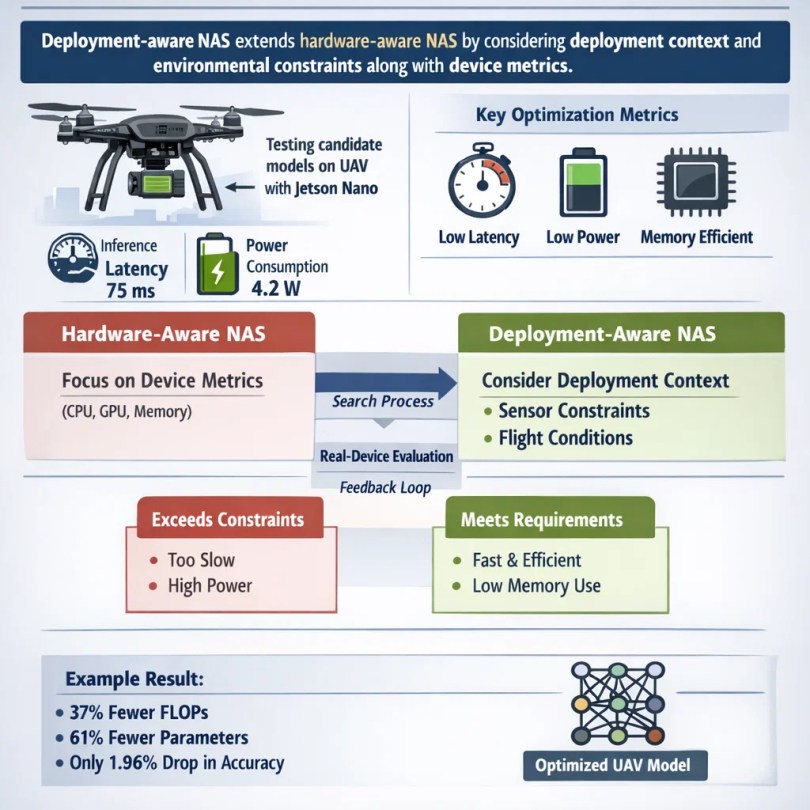
NAS, ki se zaveda strojne opreme (kot je MnasNet), se osredotoča na metrike naprave, medtem ko NAS, ki se zaveda uvajanja, gre še dlje: lahko upošteva vhodne značilnosti senzorjev (npr. ločljivost slike, večspektralne kanale) in cilje zakasnitve aplikacije (potrebno število sličic na sekundo). Lahko celo vključi omejitve leta, kot je največji dovoljeni pomnilnik, ali pa vključi ocene v simuliranih tresljajih vetra ali zamegljenosti zaradi gibanja.
NAS, ki se zaveda namestitve, lahko kaznuje arhitekture, ki presegajo na primer 5 W porabe energije ali potrebujejo več pomnilnika, kot ga ima dron. S tem se iskanje naravno preusmeri k praktičnim modelom za delovanje brezpilotnega letalnika na terenu. V bistvu gre pri NAS, ki se zaveda namestitve, za zapiranje zanke med zasnovo modela in uporabo v resničnem svetu. Namesto da bi izbral arhitekturo ločeno in upal, da bo delovala, sistematično vključuje testiranje na resničnih napravah med iskanjem.
Na primer, Kerec in sodelavci (2026) so uporabili takšen okvir za iskanje detektorja brezpilotnih letalnikov: gradili so na osnovni različici YOLOv8n, vendar so v iskanje vključili latenco in energijo Jetson Nano. Nastali model je imel 37% manj GFLOP-ov in 61% manj parametrov kot YOLOv8n, s samo 1,96% padcem mAP. To jasno kaže, kako so omejitve pri uvajanju usmerile NAS v veliko lažje in hitrejše omrežje.
Vloga NAS, ki se zaveda uvajanja, pri spremljanju preciznega kmetijstva
NAS, ki se zaveda namestitve, lahko močno izboljša spremljanje pridelkov z brezpilotnimi letalniki (UAV) s prilagoditvijo detektorjev kmetijskim razmeram. Iskanje lahko na primer daje prednost arhitekturam, ki so odlične pri zaznavanju majhnih, tankih predmetov (kot so ozki pleveli ali tanke sadike koruze) ali pri razlikovanju rastlin od talnega ozadja. Globino omrežja in receptivna polja lahko prilagodi tipični višini letenja: na nizki nadmorski višini predmeti zapolnijo sliko in lahko zahtevajo fine podrobnosti, medtem ko bi moralo biti omrežje na višji nadmorski višini dobro pri zaznavanju majhnega obsega. NAS, ki se zaveda namestitve, lahko te zahteve vkodira v svoj iskalni prostor.
Hitrost je na terenu ključnega pomena. Predstavljajte si, da dron zazna izbruh škodljivcev; če je model dovolj hiter, da obdeluje video s hitrostjo, recimo, 30 sličic na sekundo, lahko opozori pilota ali sproži takojšnje ukrepanje. V testih je model, ki ga je zasnoval NAS, na Jetson Nano deloval 28% hitreje kot standardni YOLOv8n, zahvaljujoč optimizirani arhitekturi. Prav tako je med delovanjem ONNX porabil 18,5% manj energije, kar pomeni, da lahko dron z isto baterijo leti dlje. Zaradi teh izboljšav je odločanje med letom bolj izvedljivo in se podaljša trajanje misije.
Robustnost je še ena prednost. Ker NAS, ki se zaveda namestitve, vključuje dejansko ocenjevanje naprav, lahko iskanje vključuje teste v različnih pogojih. Na primer, lahko simulira šibko svetlobo ali vključuje učne slike zore in mraka, kar zagotavlja, da končni detektor ohrani natančnost v dejanskih vremenskih in svetlobnih spremembah. Delo je pokazalo, da detektor, ki izhaja iz NAS, dobro posplošuje: preizkusili so ga na dveh različnih naborih podatkov o pridelkih (pšenične glave in sadike bombaža) in ugotovili dobro delovanje v obeh.

To kaže, da je NAS, ki se zaveda uvedbe, pomagal najti skupne, uporabne funkcije za kmetijstvo in izboljšal posplošitev na nova področja. Na splošno NAS, ki se zaveda uvedbe, pomaga uravnotežiti natančnost z daljšim časom leta. Z zmanjšanjem računanja droni porabijo manj energije in lahko pokrijejo večjo površino z enim polnjenjem baterije, hkrati pa še vedno zanesljivo zaznavajo pridelke in škodljivce.
Zasnova iskalnega prostora za detektorje kmetijskih brezpilotnih letalnikov
Pomemben del NAS, ki se zaveda uvajanja, je iskalni prostor – nabor možnih omrežnih zasnov, ki jih upošteva. Za detektorje poljščin brezpilotnih letalnikov je mogoče iskalni prostor oblikovati tako, da vključuje obetavne arhitekture za to področje. Ključni deli vključujejo:
1. Zasnova hrbtenice: Ogrodje je ekstraktor značilnosti. Za brezpilotne letalnike (UAV) bi lahko vključili lahke konvolucijske gradnike, kot so globinsko ločljive konvolucije (kot se uporabljajo v MobileNet) ali obrnjeni bloki ostankov. Obrnjeni ostanki in linearna ozka grla (stil MobileNetV2) so dobro znani po mobilni učinkovitosti. Iskalni prostor bi lahko omogočil spreminjanje širine (števila kanalov) in globine vsakega bloka, da bi se ujemal z računskim proračunom brezpilotnega letalnika. Vključeni bi lahko bili tudi moduli za pozornost ali moduli, ki so navdihnjeni s transformatorji, če si jih brezpilotni letalnik lahko privošči pri nizki porabi energije.
2. Oblika vratu: Številni detektorji objektov uporabljajo piramide značilnosti (FPN) ali omrežja za združevanje večstopenjskih značilnosti. Iskanje bi lahko raziskalo poenostavljene FPN-je ali lahko združevanje značilnosti. Na primer, uporaba glave z enim merilom v primerjavi z glavami z več merili bi lahko bila možnost. Prostor bi lahko omogočil združevanje plasti ali preskakovanje povezav, ki pomagajo zaznati objekte različnih velikosti.
3. Zasnova glave: Tudi detekcijska glava (klasifikacijske in regresijske plasti) se lahko spreminja. Za brezpilotne letalnike, ki iščejo enakomerna polja, bi lahko zadostovala enostavnejša glava. Za zaznavanje manjših neenakosti pa bi lahko iskanje vključevalo dodatne konvolucijske plasti ali različne sidrne sheme.
4. Lažje operacije: Iskalni prostor lahko izrecno dovoljuje le nizkocenovne operacije. Na primer, izbiro med pretvorbo 3×3 in cenejšo faktorizirano pretvorbo 1×3+3×1 ali vključitev modulov GhostNet. Omogoča lahko tudi majhne velikosti jeder ali zmanjšane dimenzije za omejitev računanja. Vse te izbire so odvisne od strojne opreme. Prostor lahko prepove katero koli konfiguracijo plasti, ki presega omejitev pomnilnika drona ali pričakovani energijski prag.
S skrbnim načrtovanjem tega iskalnega prostora je proces NAS usmerjen k učinkovitim, a hkrati uspešnim arhitekturam. Rezultat je lahko nova kombinacija blokov, ki niso upoštevani v standardnih modelih. Najbolje najdeni detektor je uporabil izbire blokov po meri, ki so zmanjšale GFLOP za 37% in parametre za 61% v primerjavi z YOLOv8n.
To je bilo mogoče, ker je NAS lahko kombiniral in usklajeval elemente hrbtenice in glave v okviru omejitev brezpilotnega letalnika. Skratka, iskalni prostor za detektorje kmetijskih brezpilotnih letalnikov se osredotoča na skalabilne, lahke gradnike in večstopenjsko upravljanje, vse znotraj omejitev vgrajene strojne opreme.
Cilji in omejitve optimizacije
NAS, ki se zaveda namestitve, mora žonglirati z več cilji. Primarni cilj je običajno natančnost zaznavanja (npr. povprečna natančnost, mAP), merjena na naborih podatkov za spremljanje poljščin. Na primer, mAP@50 (natančnost pri 50% IOU) je pogosta metrika. Model, optimiziran za NAS, je imel le 1,96% padec mAP@50 v primerjavi z osnovnim YOLOv8n, kar je zelo majhna izguba glede na dosežene izboljšave. Upoštevata se tudi natančnost in odpoklic (ali rezultat F1) na ključnih razredih (plevel, poljščine).
Hkrati je treba optimizirati zakasnitev in energijo. Zakasnitev je čas sklepanja na sliko; za vgrajeni grafični procesor je lahko 20–50 ms ali več. Nižja zakasnitev pomeni višjo hitrost sličic. Poraba energije (džuli na sličico) je ključnega pomena za vzdržljivost leta. Pomnilniški odtis (število parametrov, velikost modela) je še ena omejitev; modeli se morajo prilegati RAM-u naprave. Zato NAS običajno določi cilj ali kazen za te omejitve.
Na primer, vsak model, ki je počasnejši od določenega praga ali nad proračunom parametrov, se lahko uvrsti nižje. To NAS dejansko spremeni v večkriterijski optimizacijski problem: maksimiranje natančnosti ob hkratnem zmanjšanju zakasnitve, energije in velikosti.
Praktično bi to lahko dosegli z uteženo vsoto ciljev ali s trdimi omejitvami. Nekatere metode dajejo veliko kazen vsakemu kandidatu, ki preseže omejitev moči brezpilotnega letalnika. Druge eksplicitno izračunajo metriko energije: modeli so bili preizkušeni v okolju ONNX za merjenje "energetske učinkovitosti", najboljši model pa je bil +18,5% energetsko učinkovitejši od YOLOv8n. To je bil eden od ciljev, ki so vodili njihovo iskanje.
Ugotovljene kompromise si je mogoče predstavljati na Paretovi meji: na enem koncu izjemno hitri majhni modeli z nižjo natančnostjo; na drugem koncu veliki natančni modeli, ki so prepočasni ali energijsko lačni za dron. NAS, ki se zaveda namestitve, si prizadeva najti idealno točko na tej meji, ki se ujema z dejanskimi prioritetami misije (npr. majhna izguba natančnosti za veliko pospešitev). Skratka, NAS mora skupaj upoštevati metrike natančnosti (mAP, F1) in omejitve sklepanja (ms na okvir, džuli na okvir, pomnilnik). Ta uravnotežena optimizacija je tisto, zaradi česar je model resnično pripravljen za namestitve v brezpilotnih letalnikih.
Usposabljanje in vrednotenje v realnih kmetijskih okoljih
Da bi detektorji, ki jih je našel NAS, dobro delovali, jih je treba usposobiti in preizkusiti na realističnih kmetijskih podatkih. To pomeni uporabo naborov podatkov, ki zajemajo spremenljivost dejanskih polj: različne vrste poljščin, faze rasti, letne čase, svetlobne pogoje in nadmorske višine. Na primer, učenje na slikah samo mladih koruznih poganjkov morda ne bo posplošeno na zrele pšenične glave. Nabori podatkov, reprezentativni za polja, zagotavljajo, da se model nauči značilnosti, ki so pomembne na kmetiji. Med učenjem se lahko uporabi tudi razširitev podatkov (naključni pridelki, spremembe svetlosti, zamegljenost zaradi gibanja), da se posnema gibanje in osvetlitev dronov.

Pri ocenjevanju je pomembno, da model preizkusite v čim bolj realnih pogojih. Simulacijska orodja lahko pomagajo (npr. letenje virtualnega drona nad 3D-polji), vendar so zlati standard dejanski letalni testi. Primerjalno testiranje na vozilu se izvede z zagonom modela na dejanski strojni opremi brezpilotnega letalnika. Po NAS so kandidata namestili na Jetson Nano in izmerili 28,1% hitrejše sklepanje (v primerjavi z osnovnim YOLOv8n) in boljšo porabo energije. Tovrstne povratne informacije iz dejanske naprave potrjujejo, da je iskanje ustvarilo model, ki resnično izpolnjuje zahteve.
Posploševanje je prav tako ključnega pomena. Model se lahko išče in uči na enem pridelku (recimo pšenici), vendar kmetje potrebujejo detektorje, ki delujejo na več poljih. Študija je pokazala močno posploševanje med pridelki: detektor, ki izhaja iz NAS in je bil usposobljen za eno nalogo, je še vedno dobro deloval na drugem naboru podatkov o pridelkih (sadike bombaža) brez ponovnega učenja. To kaže, da lahko NAS, ki se zaveda uvajanja, prinese robustne arhitekture. Vendar pa lahko spremembe domen (npr. selitev s koruznih polj na sadovnjake) še vedno zahtevajo natančno nastavitev ali nadaljnje iskanje. Priporočljivo je tudi medsezonsko testiranje (posnetki poleti v primerjavi z jesenjo).
Nenazadnje je treba vsak nov model pred uvedbo preizkusiti na platformi brezpilotnih letalnikov. To vključuje beleženje njegove natančnosti in hitrosti na dronih, zagotavljanje, da se strojna oprema ne pregreje, in preverjanje porabe energije. Šele takrat mu lahko kmetje zaupajo pri kritičnem spremljanju. Z združevanjem usposabljanja, ustreznega za teren, in strogega ocenjevanja strojne opreme NAS, ki se zaveda uvedbe, zagotavlja detektorje, ki niso le teoretično učinkoviti, ampak so tudi preizkušeni na terenu.
Prednosti pred ročno zasnovanimi detektorji brezpilotnih letalnikov
NAS, ki se zaveda namestitve, ponuja več jasnih prednosti pred tradicionalnimi, ročno zasnovanimi modeli za brezpilotne letalnike:
1. Kompromisi za boljšo učinkovitost delovanja: Modeli, najdeni v NAS, običajno zagotavljajo večje kombinacije natančnosti, hitrosti in energetske učinkovitosti. Najboljši model je na primer deloval hitreje pri 28% in porabil 18,5% manj energije na Jetson Nano kot ročno izbrani osnovni model YOLOv8n, hkrati pa je pri detekcijski mAP izgubil le ~2%. Ročno doseganje takšnega ravnovesja bi bilo zelo težko.
2. Izboljšana posplošitev: Modeli, ki jih je odkril NAS, so lahko bolj prilagodljivi novim pogojem, saj lahko iskanje vključuje raznolike podatke ali cilje. Samodejno zasnovan detektor se je dobro posplošil na različne vrste poljščin (pšenica in bombaž) in svetlobne pogoje. Ta široka robustnost je ključnega pomena, ko leti naletijo na nepričakovane prizore.
3. Zmanjšan inženirski napor: NAS avtomatizira veliko poskusov in napak. Namesto ročnega prilagajanja velikosti plasti in testiranja številnih kandidatov, NAS, ki se zaveda uvajanja, iterativno raziskuje možnosti in najde najboljšo zasnovo za vas. To prihrani čas razvoja in strokovno znanje, kar olajša posodabljanje detektorjev za nove naloge ali strojno opremo.
4. Prilagodljivost: Ko je ogrodje NAS nastavljeno, se lahko uporablja za različne platforme ali misije brezpilotnih letalnikov. Na primer, isti NAS, ki se zaveda uvajanja, bi lahko poiskal detektor, uglašen na drugo ločljivost kamere ali model drona, tako da preprosto spremeni vhodne omejitve. To je veliko bolj prilagodljivo kot preoblikovanje omrežij od začetka za vsak scenarij.
Izzivi in omejitve
NAS, ki se zaveda uvedbe, je zmogljiv, vendar ne čarobna rešitev. Uporabljati ga je treba premišljeno, z zavedanjem zahtev glede virov in spremenljivosti ciljnega okolja. Kljub svoji obljubi ima NAS, ki se zaveda uvedbe, naslednje izzive:
1. Visoki stroški iskanja: NAS lahko zahteva precejšnje izračune. Tudi z učinkovitimi algoritmi lahko iskanje po arhitekturnem prostoru traja veliko ur z grafičnimi procesorji (ali specializiranimi izračuni). Če se ne upravlja skrbno, so lahko stroški iskanja za nekatere ekipe previsoki.
2. Pristranskost podatkov in premik domene: NAS je dober le toliko, kot so dobri uporabljeni podatki. Če učne slike niso reprezentativne za terenske razmere, lahko najdena arhitektura v resnici ne deluje dobro. Na primer, model, uglašen za eno vrsto pridelka ali eno geografsko regijo, se morda ne bo popolnoma prenesel na drugo brez nadaljnje prilagoditve.
3. Heterogenost strojne opreme: Strojna oprema brezpilotnih letalnikov je na voljo v različnih različicah (različni vgrajeni grafični procesorji, procesorji, FPGA). Model, optimiziran za eno ploščo, morda ni optimalen na drugi. NAS, ki se zaveda uvedbe, mora bodisi ponovno zagnati iskanja za vsako platformo bodisi uporabiti konzervativne omejitve, ki ustrezajo vsem – kar lahko omeji zmogljivost.
4. Praktične omejitve: Prave kmetijske uvedbe vključujejo težave, kot so posodobitve omrežja po zraku, sistemska integracija z nadzorom leta in varnostni certifikati. Tudi najboljši model NAS mora biti integriran v celoten sistem dronov. Usklajevanje posodobitev modela, regulativne odobritve in usposabljanje kmetov so netehnične ovire.
Prihodnje smeri
V prihodnosti se bo verjetno pojavila še tesnejša integracija načrtovanja modelov, senzorske tehnologije in upravljanja brezpilotnih letalnikov. NAS, ki se zaveda namestitve, bo ostal ključno orodje v tem procesu sooblikovanja. V prihodnosti se pojavlja več vznemirljivih možnosti:
1. Spletni in prilagodljivi NAS: Namesto enkratnega iskanja brez povezave bi lahko prihodnji sistemi prilagajali omrežje v realnem času ali med leti. Na primer, dron bi lahko začel z osnovnim modelom in se z uporabo lahkih algoritmov NAS sproti prilagajal novim svetlobnim ali terenskim pogojem. Ta “NAS v napravi” je zelo zahteven, vendar bi lahko močno izboljšal prilagodljivost.
2. Sočasna zasnova senzorjev in modelov: Prihodnji sistemi preciznega kmetijstva bi lahko skupaj optimizirali izbiro kamere (RGB, multispektralna, infrardeča) in nevronske mreže. NAS, ki se zaveda namestitve, bi se lahko razširil tako, da bi v svoje iskanje vključil parametre senzorjev (kot so uporabljeni spektralni pasovi) in našel najboljšo kombinacijo strojne opreme in modela.
3. Multispektralna/hiperspektralna integracija: Kot kaže študija bolezni bombaža, lahko integracija multispektralnih posnetkov izboljša odkrivanje, zlasti težav v zgodnji fazi. Prihodnji NAS bi lahko raziskali modele z več tokovi, ki združujejo kanale RGB in bližnje infrardeče kanale za zanesljivejše zaznavanje subtilnih sprememb rastlin.
4. Avtonomni procesi odločanja: Konec koncev lahko detektorji, optimizirani za NAS, omogočijo popolno avtonomijo. Na primer, dron lahko samodejno ustvari načrt škropljenja ali opozori upravljavce kmetij, če zazna določene pogoje. NAS, ki se zaveda uvajanja, bi se lahko razširil na celovite cevovode (modeli zaznavanja + ukrepanja), s čimer bi se optimiziral celoten sistem.
5. Etični in okoljski vidiki: Ker brezpilotni letalniki postajajo vse bolj zmogljivi, moramo upoštevati zasebnost, varnost zračnega prostora in vplive na kmetijsko delo (kot ugotavljata Agrawal in Arafat). Pomemben cilj v prihodnosti je zagotoviti, da se brezpilotni letalniki, optimizirani za NAS, v kmetijstvu uporabljajo odgovorno.
Zaključek
NAS, ki se zaveda uvedbe, predstavlja zmogljiv pristop k prilagajanju lahkih detektorjev objektov za spremljanje pridelkov z brezpilotnimi letalniki (UAV). Z vgradnjo strojne opreme brezpilotnih letalnikov in omejitev poslanstva v iskanje ustvarja modele, ki prihranijo pri izračunih in energiji, ne da bi pri tem žrtvovali veliko natančnost. Nedavno delo je na primer pokazalo, da detektor, zasnovan z NAS, uporablja 37% manj FLOP-ov in 61% manj parametrov kot referenčni YOLOv8n, vendar se je njegov mAP zmanjšal le za ~2%.
Na dejanski strojni opremi za drone je to pomenilo hitrejše sklepanje za 28% in boljšo energetsko učinkovitost za 18%. Takšne izboljšave se odražajo v daljših časih leta, hitrejši analizi in odzivnejši podpori kmetijstvu. V primerjavi z ročno izdelanimi modeli NAS, ki se zaveda uvajanja, zagotavlja boljšo posplošitev zmogljivosti, manj ročnega nastavljanja in prilagodljivost novim platformam UAV.
V kontekstu preciznega kmetijstva lahko te izboljšave naredijo spremljanje pridelkov z brezpilotnimi letalniki (UAV) bolj praktično in učinkovito. Droni, opremljeni z detektorji, optimiziranimi za NAS, lahko zanesljiveje zaznajo plevel, škodljivce ali stres, kar omogoča pravočasne intervencije, ki prihranijo vire in povečajo donose. Ker kmetijstvo še naprej uvaja drone in umetno inteligenco, bo NAS, ki se zaveda uvajanja, igral osrednjo vlogo pri zagotavljanju, da so modeli, ki delujejo na teh dronih, učinkoviti, natančni in pripravljeni za uporabo na terenu. Premošča vrzel med najsodobnejšimi raziskavami nevronskih mrež in praktičnimi potrebami kmetov ter pomaga pri usmerjanju prihodnosti preciznega kmetijstva, ki temelji na podatkih.
Spremljanje pridelka