Беспилотне летелице (БПЛ), или дронови, трансформишу модерну пољопривреду пружајући брзе снимке поља из ваздуха. Користе се за скенирање усева ради провере здравља, фазе раста, штеточина, корова и процене приноса. На пример, Кина сада има преко 250.000 пољопривредних дронова у функцији, а у Тајланду је око 30% пољопривредног земљишта покривено прскањем или праћењем дроновима до 2023. године. Ове БПЛ чине пољопривреду ефикаснијом брзим откривањем проблема (као што су појаве штеточина или недостатак воде) који се могу превидети на терену.
Међутим, мале беспилотне летелице имају веома ограничену рачунарску снагу на броду и век трајања батерије. Стога је покретање сложених алгоритама вештачке интелигенције на њима у реалном времену изазов. Традиционални лагани модели за детекцију објеката (као што су сићушни YOLO или MobileNet детектори) могу само делимично да задовоље ове потребе: често жртвују тачност или брзину и захтевају значајно ручно подешавање. Ова празнина мотивише претрагу неуронске архитектуре (NAS) која је свесна распоређивања: аутоматизовану методу дизајнирања која прилагођава моделе дубоког учења тачним захтевима беспилотних летелица распоређених на терену.
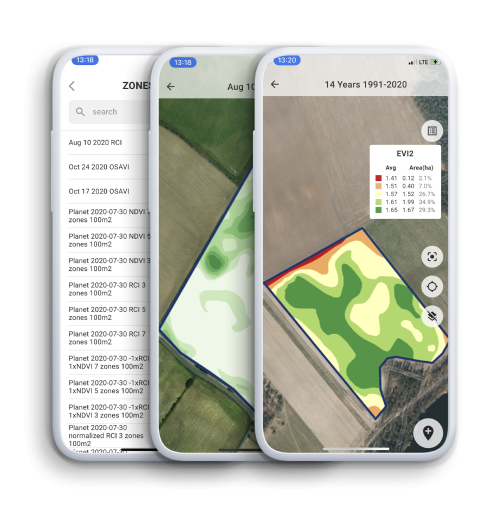
Модерна прецизна пољопривреда користи беспилотне летелице (дронове) за истраживање поља и праћење стања усева. Летећи изнад великих површина, дронови могу прикупљати слике високе резолуције биљака, земљишта и образаца поља. Ове слике се достављају алгоритмима рачунарског вида који детектују коров међу усевима, процењују принос (нпр. бројање плодова или главица) или уочавају ране знаке болести или недостатка хранљивих материја. На пример, дронови омогућавају циљано прскање хербицидима по коровским површинама, смањујући употребу хемикалија и трошкове.
Међутим, мали рачунари у дроновима (често ограничени на неколико вати снаге) тешко покрећу велике неуронске мреже брзином лета. Због тога је тешко извршити анализу у реалном времену: ако дрон примети проблем, мора брзо да реагује или да забележи податке пре него што се батерија испразни. Тренутни лагани детектори (нпр. YOLOv8 nano, YOLO-tiny, MobileNets) се пројектују ручно и често укључују компромисе: смањење модела убрзава процес, али може утицати на тачност.
Као резултат тога, постоји јака потреба за методама које аутоматски проналазе најбољи могући модел с обзиром на ограничења беспилотне летелице. NAS, свестан имплементације, испуњава ову потребу тражећи архитектуре неуронских мрежа које заједно оптимизују тачност детекције и коришћење ресурса (латенција, снага, меморија) у реалним условима беспилотне летелице. Овај приступ може да пружи специјализоване моделе који ефикасно раде на хардверу дронова, а да притом остају веома прецизни за задатке праћења усева.
Захтеви за детекцију објеката беспилотним летелицама у праћењу усева
Пољопривредне беспилотне летелице обављају низ задатака визуелне детекције, сваки са својим захтевима:
1. Здравље усева и откривање стреса: Дронови користе RGB, термалне или мултиспектралне камере за идентификацију стресираних биљака, недостатка хранљивих материја или симптома болести. Алгоритми у реалном времену могу мапирати варијабилност поља, усмеравајући наводњавање или ђубрење. Прецизно откривање знакова стреса биљака омогућава благовремене интервенције како би се сачувао принос.
2. Идентификација корова: Детекција корова међу усевима омогућава пољопривредницима прскање само нежељених биљака, штедећи хербициде. На пример, студија о пољима памука користила је снимке беспилотне летелице са детектором заснованим на YOLOv7 и постигла је тачност од око 83% у одвајању корова од памука. Ипак, разликовање визуелно сличног корова и усева остаје тешко на претрпаним сликама поља.

3. Откривање штеточина и болести: Беспилотне летелице могу да открију појаве штеточина (нпр. скакавце, инсекте или гљивичну болест) раније од људи који пешке ходају. Дронови такође подржавају мапирање зона заражених штеточинама путем мултиспектралног снимања, што побољшава само RGB. Брзо и прецизно откривање штеточина је кључно за спречавање ширења.
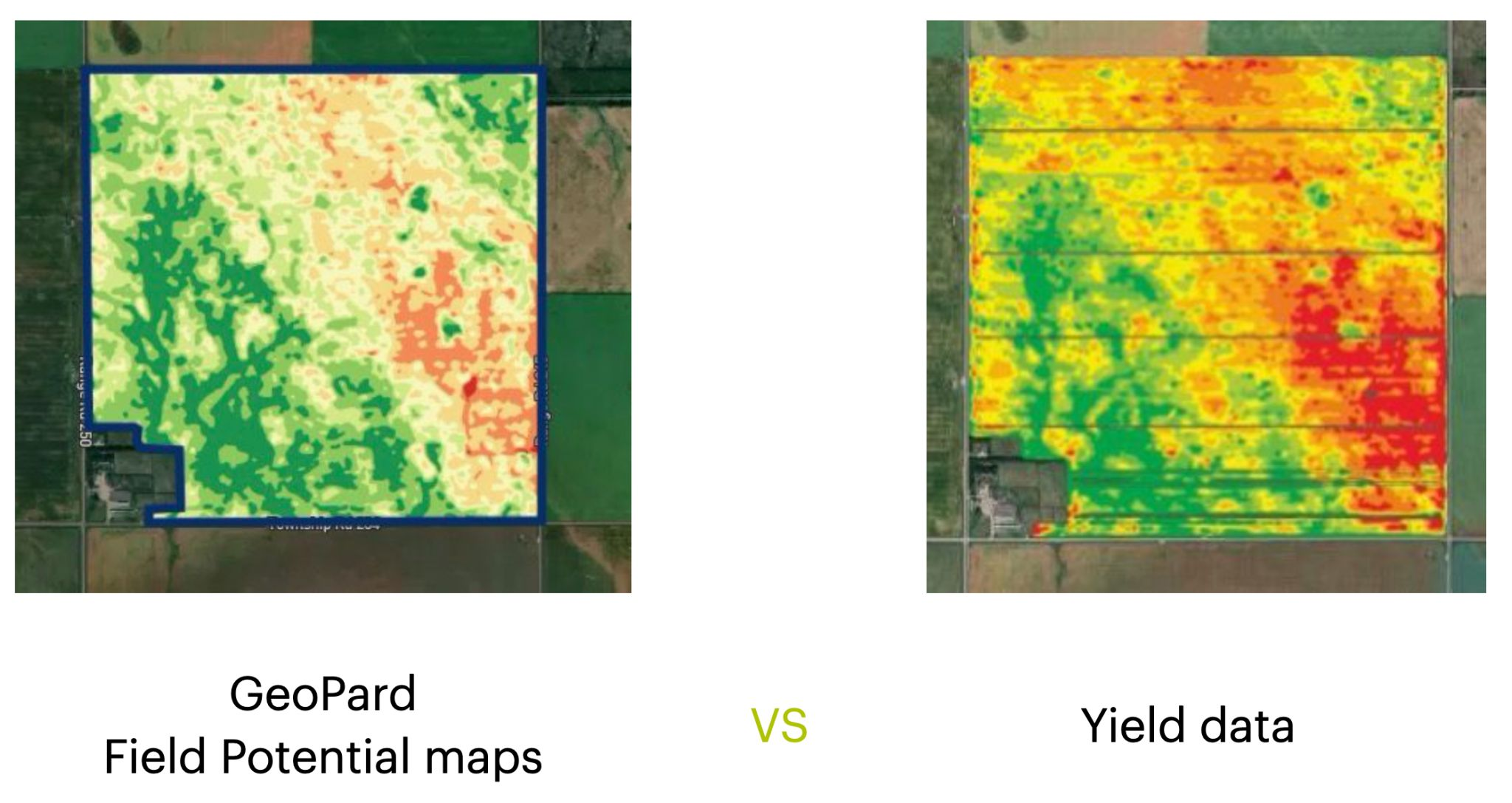
4. Процена приноса: Бројање воћа, главица житарица или биљака из ваздуха помаже у предвиђању количине жетве. Модели обучени за детекцију јабука, диња или главица пшенице на снимцима беспилотних летелица могу убрзати процену приноса. На пример, неуронске мреже на снимцима дрона коришћене су за бројање усева лубеница и диња на пољима.
5. Геодетска снимања и картографија: Дронови такође креирају мапе поља (топографија, разлике у земљишту) које помажу у планирању обраде. Иако није стриктно детекција објеката, ово је део праћења беспилотним летелицама.
Ови задаци често захтевају закључивање у скоро реалном времену: дрон који лети изнад поља може морати да обрађује видео кадрове у ходу (неколико кадрова у секунди) како би се контролне одлуке (као што је подешавање висине или активирање прскалице) могле донети одмах. У другим случајевима, мала кашњења (секунде) могу бити прихватљива ако се подаци евидентирају и анализирају након слетања.
Важно је напоменути да вид беспилотне летелице мора да се носи са варијабилношћу окружења: јаком сунчевом светлошћу, сенкама, замућењем покрета изазваним ветром, заклањањем преклапајућим лишћем или променама надморске висине и угла. Величине објеката варирају (крупни коров наспрам удаљених јата штеточина), тако да детектори морају да управљају карактеристикама више размера.
Коначно, пољопривредне мисије беспилотних летелица подразумевају строге компромисе између тачности, латенције и енергије. Висока тачност детекције је потребна како би се избегло превиђање корова или штеточина, али покретање веома дубоке мреже може брзо испразнити батерију. Модел детекције стога мора бити брз и енергетски ефикасан, а истовремено довољно прецизан за задатак. Ови строги захтеви истичу зашто је за беспилотне летелице у пољопривреди потребан специјализовани дизајн модела.
Лагани детектори објеката за платформе беспилотних летелица
Лагани детектори објеката су неуронске мреже посебно дизајниране за рад на ограниченом хардверу. Често користе мале кичме (као што су MobileNet или ShuffleNet), смањене ширине слојева или поједностављене дизајне врата/главе. На пример, модели породице YOLO укључују “нано” и “мале” верзије (нпр. YOLOv8n, YOLOv5s) које имају мање параметара и захтевају мање операција (FLOP).
Такви детектори могу да раде брзином од десетина фрејмова у секунди на уграђеном хардверу као што су NVIDIA Jetson Nano или Google Coral. На пример, Ag-YOLO је био прилагођени YOLO детектор за плантаже палми који је радио брзином од 36,5 fps на Intel Neural Compute Stick 2 (користећи само 1,5 W) и постигао високу тачност (F1 = 0,9205). Овај модел је користио око 12 пута мање параметара од YOLOv3-Tiny, а удвостручио је брзину.

Ови примери показују компромисе у дизајну модела: смањење величине или сложености модела (нпр. мање слојева или канала) обично убрзава закључивање и смањује потрошњу енергије, али може смањити тачност. Ag-YOLO је жртвовао део капацитета да би добио на брзини и ефикасности, али је ипак задржао висок F1 резултат од 0,92 на свом задатку.
Слично томе, три варијанте YOLOv7 су упоређене за детекцију корова: пуни YOLOv7 је постигао тачност од 83%, док је мања YOLOv7-w6 мрежа пала на тачност од 63%. Ово илуструје ограничење генеричких лаганих детектора: модели подешени за једно окружење или тип објекта могу бити лошији у другом. Детектор смањен због брзине може пропустити суптилне знакове (нпр. мали или камуфлирани коров), што штети робусности под различитим условима.
У пољопривреди, ове генеричке лагане мреже можда неће бити оптималне без даљег подешавања. На пример, YOLOv7 модел претходно обучен на уобичајеним скуповима података можда неће савршено обрадити јединствене текстуре и размере слика усева. Стога постоји потреба за оптимизацијом архитектуре модела специфичном за задатак и платформу. Ручно подешавање (промена слојева, филтера итд.) за сваку нову врсту дрона или сорту усева је радно интензивно. Ово мотивише аутоматизоване методе - као што је NAS који је свестан распоређивања - да пронађу најбољи баланс величине, тачности и робусности за дату платформу беспилотних летелица и пољопривредну примену.
Претрага неуронске архитектуре у системима вида заснованим на беспилотним летелицама
Претрага неуронске архитектуре (NAS) је аутоматизована метода за пројектовање архитектура неуронских мрежа. Уместо ручног подешавања броја слојева, филтера и веза, NAS користи алгоритме (учење појачањем, еволутивне методе или претрагу засновану на градијенту) да би истражио простор могућих дизајна и пронашао оне који оптимизују изабрани циљ (као што је тачност).
NAS је већ примењен за креирање мрежа прилагођених мобилним уређајима. На пример, Google-ов MnasNet је био пионирски NAS “свестан платформе” који је директно укључивао латенцију стварног уређаја у циљ. MnasNet је мерио време закључивања на Google Pixel телефону за сваки модел кандидата током претраге и уравнотежио тачност у односу на ову измерену латенцију. Резултат је била породица CNN-ова који су били и брзи и прецизни на мобилном хардверу, надмашујући ручно дизајниране MobileNet-ове и NASNet моделе на ImageNet-у.
Међутим, генерички NAS приступи попут MnasNet-а фокусирају се на опште задатке вида (ImageNet класификација или COCO детекција) и општи хардвер (нпр. мобилни телефони). За праћење усева помоћу беспилотних летелица, проблем је специјализованији. Желимо детекторе оптимизоване за одређене класе објеката (биљке, коров, штеточине) и прилагођене сензорима и профилу лета беспилотне летелице. Стандардни NAS који оптимизује само тачност или генеричку латенцију може превидети нијансе попут детекције малих објеката или енергетских ограничења.
Такође, традиционалне NAS методе могу бити веома рачунски скупе (често захтевају дане на великим GPU кластерима), што није увек практично за истраживаче у пољопривреди. Стога су за UAV вид потребни NAS оквири специфични за задатке. Они морају да укључују критеријуме релевантне за UAV и да буду што ефикаснији.
У свим случајевима, свест о ограничењима је кључна: NAS мора бити свестан ограничења циљног уређаја (слично као MnasNet) и захтева беспилотне летелице у реалном времену током лета. Ако је претрага преспора или игнорише потрошњу енергије, резултујући модел можда неће добро функционисати на терену.
У пракси, NAS за UAV вид би директно укључио латенцију хардвера и енергију у метрику претраге. На пример, могло би се измерити број фрејмова детектора кандидата на стварном рачунару дрона (као што је NVIDIA Jetson) и то користити као резултат. Ово је у супротности са коришћењем једноставних проксија попут FLOP-ова, који не бележе брзину у стварном свету.
На тај начин, NAS може открити архитектуре које најбоље искоришћавају могућности уређаја. Укратко, NAS нуди начин за аутоматско пројектовање детектора за беспилотне летелице, али мора бити прилагођен како би се узели у обзир задаци специфични за беспилотне летелице и захтеви за ефикасност.
NAS свестан распоређивања: Основни принципи
NAS који је свестан распоређивања проширује NAS који је свестан хардвера укључивањем контекста распоређивања и ограничења окружења у процес пројектовања. Другим речима, не узима у обзир само хардвер дрона (брзина CPU/GPU, ограничења меморије, енергетски буџет) већ и оно са чиме ће се беспилотна летелица заправо сусрести на терену. То значи експлицитну оптимизацију за метрике као што су латенција закључивања на циљном уређају, потрошња енергије и заузетост меморије, а све то уз тежњу високој тачности детекције.
На пример, током NAS-а, сваки кандидатски модел би се могао распоредити на Jetson Nano причвршћеном за беспилотну летелицу и забележити његово време закључивања и потрошњу енергије у стварном свету. Ова емпиријска повратна информација помаже у вођењу потраге ка моделима који заиста испуњавају критеријуме распоређивања.
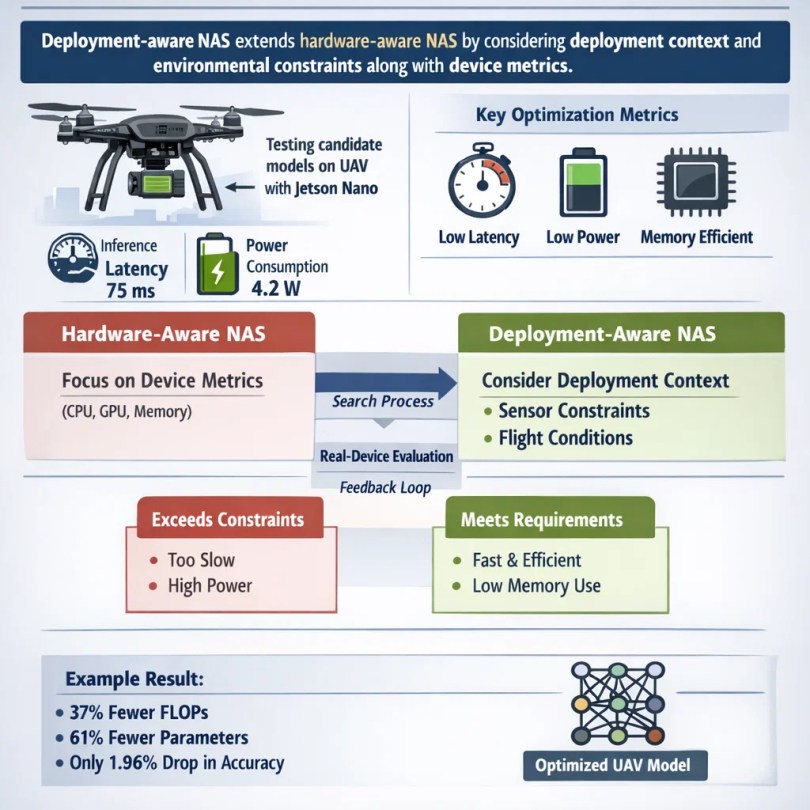
NAS који је свестан хардвера (као што је MnasNet) фокусира се на метрику уређаја, док NAS који је свестан примене иде даље: може узети у обзир карактеристике улаза сензора (нпр. резолуцију слике, мултиспектралне канале) и циљеве латенције апликације (потребан број кадрова у секунди). Може чак укључити и ограничења лета као што је максимално дозвољена меморија или укључити процене под симулираним подрхтавањем ветра или замућењем покрета.
NAS који је свестан распоређивања може кажњавати архитектуре које прелазе, рецимо, потрошњу енергије од 5W или којима је потребно више меморије него што дрон има. На тај начин, претрага се природно усмерава ка практичним моделима за теренски рад беспилотне летелице. У суштини, NAS који је свестан распоређивања се бави затварањем петље између дизајна модела и употребе у стварном свету. Уместо да се архитектура бира изоловано и нада да ће функционисати, он систематски укључује тестирање на стварним уређајима током претраге.
На пример, Керец и др. (2026) су користили такав оквир за претрагу детектора беспилотних летелица: надоградили су се на YOLOv8n основну линију, али су у претрагу укључили латенцију и енергију Jetson Nano. Добијени модел је имао 37% мање GFLOP-ова и 61% мање параметара од YOLOv8n, са падом mAP-а од само 1,96%. Ово јасно показује како су ограничења распоређивања усмерила NAS ка много лакшој и бржој мрежи.
Улога NAS-а свесног распоређивања у праћењу прецизне пољопривреде
NAS који је свестан распоређивања може значајно побољшати праћење усева помоћу беспилотних летелица прилагођавањем детектора пољопривредним условима. На пример, претрага може фаворизовати архитектуре које се истичу у детекцији малих, танких објеката (као што су уски коров или танке саднице кукуруза) или у разликовању биљака од позадине земљишта. Може прилагодити дубину мреже и рецептивна поља типичној висини лета: на малој надморској висини, објекти испуњавају слику и могу захтевати фине детаље, док би на већој надморској висини мрежа требало да буде добра у детекцији малих размера. NAS који је свестан распоређивања може кодирати ове захтеве у свој простор претраге.
Брзина је кључна на терену. Замислите да дрон детектује појаву штеточина; ако је модел довољно брз да обради видео при, рецимо, 30 кадрова у секунди, може упозорити пилота или покренути тренутну акцију третмана. У тестовима, модел дизајниран од стране NAS-а радио је 28% брже на Jetson Nano-у него стандардни YOLOv8n, захваљујући својој оптимизованој архитектури. Такође је користио 18.5% мање енергије током ONNX рада, што значи да дрон може дуже да лети са истом батеријом. Ови добици чине доношење одлука у лету изводљивијим и продужавају трајање мисије.
Робусност је још једна предност. Пошто NAS систем који је свестан примене укључује стварну процену уређаја, претрага може да укључује тестове под различитим условима. На пример, може симулирати слабо осветљење или укључивати слике за обуку из зоре и сумрака, осигуравајући да коначни детектор одржи тачност под стварним променама времена и осветљења. Рад је показао да детектор изведен из NAS-а добро генерализује: тестирали су га на два различита скупа података о усевима (главе пшенице и саднице памука) и пронашли су снажне перформансе у оба.

Ово указује на то да је NAS који је свестан примене помогао у проналажењу заједничких, корисних карактеристика за пољопривреду, побољшавајући генерализацију на нова поља. Генерално, NAS који је свестан примене помаже у балансирању тачности са дужим временом лета. Смањењем израчунавања, дронови троше мање енергије и могу покрити већу површину са једним пуњењем батерије, а све то уз поуздано откривање усева и штеточина.
Дизајн простора за претрагу пољопривредних детектора беспилотних летелица
Важан део NAS-а који је свестан примене је простор претраге – скуп могућих мрежних дизајна које разматра. За детекторе усева беспилотних летелица, простор претраге може бити креиран тако да укључује обећавајуће архитектуре за ову област. Кључни делови укључују:
1. Дизајн кичме: Окосница је екстрактор карактеристика. За беспилотне летелице, могу се укључити лагани конволуциони градивни блокови као што су конволуције које се могу одвојити по дубини (као што се користи у MobileNet-у) или инвертовани резидуални блокови. Инвертовани резидуали и линеарна уска грла (стил MobileNetV2) су добро познати по мобилној ефикасности. Простор претраживања може омогућити промену ширине (броја канала) и дубине сваког блока како би се ускладио са рачунарским буџетом беспилотне летелице. Модули пажње или инспирисани трансформатором такође могу бити укључени ако беспилотна летелица може да их приушти при малој снази.
2. Дизајн врата: Многи детектори објеката користе пирамиде карактеристика (FPN) или мреже агрегације путања како би комбиновали вишеразмерне карактеристике. Претрага би могла да истражи поједностављене FPN-ове или лагану агрегацију карактеристика. На пример, коришћење главе једне скале у односу на главе више скала би могле бити опције. Простор би могао да омогући обједињавање слојева или прескакање веза које помажу у откривању објеката различитих величина.
3. Дизајн главе: Глава за детекцију (класификациони и слојеви регресије кутије) такође може да варира. За беспилотне летелице које посматрају једнообразна поља, једноставнија глава може бити довољна. Али да би се ухватиле ситне површине, претрага може да укључује додатне конволуционе слојеве или различите шеме сидрења.
4. Лагане операције: Простор претраживања може експлицитно дозволити само јефтине операције. На пример, избор између 3×3 конверзије наспрам јефтиније 1×3+3×1 факторисане конверзије или укључивање GhostNet модула. Такође може дозволити мале величине језгра или смањене димензије да би се ограничило израчунавање. Сви ови избори су вођени хардвером. Простор може забранити било коју конфигурацију слоја која прелази ограничење меморије дрона или очекивани енергетски праг.
Пажљивим дизајнирањем овог простора претраге, NAS процес је вођен ка ефикасним, али делотворним архитектурама. Резултат би могла бити нова комбинација блокова који нису разматрани у стандардним моделима. Најбоље пронађени детектор је користио прилагођене изборе блокова који смањују GFLOP-ове за 37% и параметре за 61% у поређењу са YOLOv8n.
Ово је било могуће зато што је NAS могао да комбинује елементе кичме и главе под ограничењима беспилотне летелице. Укратко, простор претраге за пољопривредне детекторе беспилотних летелица фокусира се на скалабилне, лагане градивне блокове и руковање вишеструким размерама, све у оквиру ограничења уграђеног хардвера.
Циљеви и ограничења оптимизације
NAS који је свестан имплементације мора да жонглира са више циљева. Примарни циљ је обично тачност детекције (нпр. средња просечна прецизност, mAP), мерена на скуповима података за праћење усева. На пример, mAP@50 (тачност на 50% IOU) је уобичајена метрика. Модел оптимизован за NAS имао је пад mAP@50 од само 1,96% у поређењу са основним YOLOv8n, што је веома мали губитак у односу на постигнуте добитке. Прецизност и призив (или F1 резултат) на кључним класама (коров, усеви) се такође узимају у обзир.
Истовремено, латенција и енергија морају бити оптимизоване. Латенција је време закључивања по слици; за уграђени графички процесор може бити 20–50 ms или више. Мања латенција значи већу брзину кадрова. Потрошња енергије (џули по кадру) је кључна за издржљивост лета. Меморијски отисак (број параметара, величина модела) је још једно ограничење; модели морају да стану у RAM меморију уређаја. Стога, NAS обично поставља циљ или казну за ова ограничења.
На пример, сваки модел спорији од одређеног прага или изнад буџета параметара може бити ниже рангиран. Ово ефикасно претвара NAS у проблем оптимизације са више циљева: максимизирати тачност уз минимизирање латенције, енергије и величине.
Практично, ово би се могло постићи пондерисаним збиром циљева или строгим ограничењима. Неке методе дају велику казну сваком кандидату који прелази ограничење снаге беспилотне летелице. Друге експлицитно израчунавају метрику енергије: модели су тестирани под ONNX извршавањем ради мерења “енергетске ефикасности”, а најбољи модел је био +18.5% енергетски ефикаснији од YOLOv8n. Ово је био један од циљева који су водили њихову претрагу.
Пронађени компромиси могу се визуализовати на Парето граници: на једном крају, изузетно брзи мали модели са нижом тачношћу; на другом, велики тачни модели који су преспори или захтевају много енергије за дрон. NAS који је свестан распоређивања има за циљ да пронађе идеалну тачку на овој граници која одговара стварним приоритетима мисије (нпр. мали губитак тачности за велико убрзање). Укратко, NAS мора заједно узети у обзир метрике тачности (mAP, F1) и ограничења закључивања (ms по фрејму, џули по фрејму, меморија). Ова уравнотежена оптимизација је оно што чини модел заиста спремним за распоређивање за употребу беспилотних летелица.
Обука и евалуација у реалним пољопривредним условима
Да би детектори пронађени у NAS-у добро функционисали, морају бити обучени и тестирани на реалним пољопривредним подацима. То значи коришћење скупова података који обухватају варијабилност стварних поља: различите врсте усева, фазе раста, годишња доба, услове осветљења и надморске висине. На пример, обука на сликама само младих изданака кукуруза можда се неће генерализовати на зреле главе пшенице. Скупови података репрезентативни за поље осигуравају да модел учи карактеристике које су важне на фарми. Проширивање података (случајни усеви, промене осветљености, замућење покрета) такође се може применити током обуке како би се имитирало кретање и осветљење дрона.

Приликом процене, важно је тестирати модел у што реалнијим условима. Алати за симулацију могу помоћи (нпр. летење виртуелног дрона преко 3Д поља), али су прави летни тестови златни стандард. Бенчмаркинг на броду се врши покретањем модела на стварном хардверу беспилотне летелице. Након NAS-а, кандидата су распоредили на Jetson Nano и измерили 28.1% брже закључивање (у поређењу са основним YOLOv8n) и бољу потрошњу енергије. Ова врста повратних информација са стварног уређаја потврђује да је претрага произвела модел који заиста испуњава захтеве.
Генерализација је такође кључна. Модел се може претраживати и тренирати на једној култури (рецимо, пшеници), али пољопривредницима су потребни детектори који раде на различитим пољима. Студија је показала снажну генерализацију међу усевима: детектор изведен из NAS-а, обучен на једном задатку, и даље је добро функционисао на другом скупу података о усевима (саднице памука) без поновног обучавања. Ово сугерише да NAS, који је свестан примене, може дати робусне архитектуре. Међутим, промене домена (нпр. премештање са кукурузних поља на воћњаке) могу и даље захтевати фино подешавање или даљу претрагу. Такође се препоручује тестирање током сезона (летњи наспрам јесењих снимака).
Коначно, сваки нови модел треба да буде тестиран на платформи беспилотне летелице пре примене. То укључује евидентирање његове тачности и брзине на дроновима, осигуравање да се хардвер не прегрева и проверу потрошње енергије. Тек тада пољопривредници могу да му верују за критично праћење. Комбиновањем обуке релевантне за терен и ригорозне евалуације хардвера, NAS који је свестан примене даје детекторе који нису само теоретски ефикасни, већ су и доказани на терену.
Предности у односу на ручно дизајниране детекторе беспилотних летелица
NAS који је свестан распоређивања нуди неколико јасних предности у односу на традиционалне, ручно дизајниране моделе за беспилотне летелице:
1. Бољи компромиси у погледу перформанси: Модели пронађени на NAS-у имају тенденцију да пружају веће комбинације тачности, брзине и енергетске ефикасности. На пример, најбољи модел је радио 28% брже и користио 18.5% мање енергије на Jetson Nano-у него ручно изабрана основна линија YOLOv8n, док је изгубио само ~2% у детекцији mAP. Постизање такве равнотеже ручно би било веома тешко.
2. Побољшана генерализација: Модели које је открила NAS могу бити прилагодљивији новим условима, јер претрага може да укључи различите податке или циљеве. Аутоматски дизајнирани детектор се добро генерализовао на различите врсте усева (пшеницу и памук) и услове осветљења. Ова широка робусност је кључна када летови наилазе на неочекиване сцене.
3. Смањени инжењерски напори: NAS аутоматизује много покушаја и грешака. Уместо ручног подешавања величина слојева и тестирања многих кандидата, NAS који је свестан имплементације итеративно истражује изборе и проналази најбољи дизајн за вас. Ово штеди време развоја и стручност, олакшавајући ажурирање детектора за нове задатке или хардвер.
4. Скалабилност: Једном подешен, NAS оквир се може користити за различите UAV платформе или мисије. На пример, исти NAS који је свестан распоређивања могао би да тражи детектор подешен на другу резолуцију камере или модел дрона једноставном променом ограничења улаза. Ово је много скалабилније него редизајнирање мрежа од нуле за сваки сценарио.
Изазови и ограничења
NAS систем који је свестан распоређивања је моћан, али не и чаробни штапић. Мора се примењивати промишљено, уз свест о својим захтевима за ресурсима и варијабилности циљног окружења. Упркос свом обећању, NAS систем који је свестан распоређивања има изазове:
1. Високи трошкови претраживања: NAS може захтевати значајна рачунска обрада. Чак и са ефикасним алгоритмима, претраживање архитектуре простора може трајати много сати рада GPU-а (или специјализованог рачунског обрада). Ако се не управља пажљиво, трошкови претраживања могу бити превелики за неке тимове.
2. Пристрасност података и померање домена: NAS је добар колико и подаци који се користе. Ако слике за обуку нису репрезентативне за услове на терену, пронађена архитектура може да не функционише у стварности. На пример, модел подешен на једну врсту усева или један географски регион можда се неће савршено пренети на другу без даље адаптације.
3. Хетерогеност хардвера: Хардвер беспилотних летелица долази у много различитих облика (различити уграђени графички процесори, процесори, FPGA). Модел оптимизован за једну плочу можда неће бити оптималан на другој. NAS који је свестан распоређивања мора или поново покренути претраге за сваку платформу или користити конзервативна ограничења која одговарају свима – што може ограничити перформансе.
4. Практична ограничења: Права примена пољопривредних система укључује проблеме попут ажурирања мреже путем интернета, системске интеграције са контролом лета и безбедносне сертификације. Чак и најбољи NAS модел мора бити интегрисан у комплетан систем дронова. Координација ажурирања модела, регулаторна одобрења и обука пољопривредника су нетехничке препреке.
Будући правци
У будућности ће вероватно доћи до још чвршће интеграције дизајна модела, сензорске технологије и контроле беспилотних летелица. NAS, свестан распоређивања, остаће кључни алат у овом процесу заједничког дизајна. Гледајући унапред, појављује се неколико узбудљивих путева:
1. Онлајн и адаптивни NAS: Уместо једнократне офлајн претраге, будући системи би могли да прилагођавају мрежу у реалном времену или између летова. На пример, дрон би могао да почне са основним моделом и, користећи лагане NAS алгоритме, да се прилагођава како би се носио са новим условима осветљења или терена у ходу. Овај “NAS на уређају” је веома изазован, али би могао значајно побољшати прилагодљивост.
2. Ко-дизајн сензора и модела: Будући системи прецизне пољопривреде могли би заједно да оптимизују избор камере (RGB, мултиспектрална, инфрацрвена) и неуронске мреже. NAS, свестан примене, могао би да се прошири тако да укључи параметре сензора (као што су коришћени спектрални опсези) у своју претрагу, проналазећи најбољу комбинацију хардвера и модела.
3. Мултиспектрална/хиперспектрална интеграција: Као што студија о болести памука сугерише, интегрисање мултиспектралних снимака може побољшати откривање, посебно проблема у раној фази. Будући NAS би могао да истражи моделе са вишеструким стримовима који спајају RGB и блиске инфрацрвене канале како би поузданије детектовали суптилне промене на биљкама.
4. Аутономни процес доношења одлука: На крају крајева, детектори оптимизовани за NAS могу довести до потпуне аутономије. На пример, дрон би могао аутоматски да генерише план прскања или да упозори менаџере фарми ако детектује одређене услове. NAS који је свестан распоређивања могао би се проширити на цевоводе од почетка до краја (модели детекције + акције), оптимизујући цео систем.
5. Етичка и еколошка разматрања: Како беспилотне летелице постају све способније, морамо узети у обзир приватност, безбедност ваздушног простора и утицај на пољопривредни рад (као што су истакли Агравал и Арафат). Осигуравање да се дронови оптимизовани за NAS одговорно користе у пољопривреди је важан будући циљ.
Закључак
NAS, свестан распоређивања, представља моћан приступ прилагођавању лаганих детектора објеката за праћење усева помоћу беспилотних летелица. Уграђивањем хардвера беспилотних летелица и ограничења мисије у претрагу, производи моделе који штеде рачунање и енергију без жртвовања велике тачности. На пример, недавни рад је показао да детектор дизајниран помоћу NAS-а користи 37% мање FLOP-ова и 61% мање параметара од референтног YOLOv8n, али је његов mAP опао за само ~2%.
На стварном хардверу дронова, ово је значило брже закључивање 28% и бољу енергетску ефикасност 18%. Такви добици се преводе у дуже време лета, бржу анализу и бржу подршку пољопривреди. У поређењу са ручно израђеним моделима, NAS који је свестан имплементације пружа бољу генерализацију перформанси, мање ручног подешавања и скалабилност на нове UAV платформе.
У контексту прецизне пољопривреде, ова побољшања могу учинити праћење усева помоћу беспилотних летелица практичнијим и ефикаснијим. Дронови опремљени детекторима оптимизованим за NAS могу поузданије да уоче коров, штеточине или стрес, омогућавајући благовремене интервенције које штеде ресурсе и повећавају приносе. Како пољопривреда наставља да усваја дронове и вештачку интелигенцију, NAS који је свестан примене играће централну улогу у осигуравању да су модели који раде на тим дроновима ефикасни, тачни и спремни за употребу на пољу. Он премошћује јаз између најсавременијих истраживања неуронских мрежа и практичних потреба пољопривредника, помажући у покретању будућности прецизне пољопривреде засноване на подацима.
Надзор усева