
Ylämaan ohra, Kiinan Qinghain-Tiibetin ylängön korkealla sijaitsevilla alueilla viljeltävä kestävä viljakasvi, on ratkaisevassa roolissa paikallisessa ruokaturvassa ja taloudellisessa vakaudessa. Tieteellisesti se tunnetaan nimellä Hordeum vulgare L., tämä viljelykasvi viihtyy äärimmäisissä olosuhteissa – ohuessa ilmassa, alhaisissa happipitoisuuksissa ja 6,3 °C:n keskilämpötilassa vuodessa – mikä tekee siitä korvaamattoman yhteisöille ankarissa ympäristöissä.
Ylämaan ohraa viljellään Kiinassa yli 270 000 hehtaarilla, pääasiassa Xizangin autonomisella alueella. Ylämaan ohra muodostaa yli puolet alueen kylvöalasta ja yli 701 TP3 t sen kokonaisviljatuotannosta. Ohran tiheyden – taimien tai tähkien lukumäärän pinta-alayksikköä kohti – tarkka seuranta on välttämätöntä maatalouskäytäntöjen, kuten kastelun ja lannoituksen, optimoimiseksi ja satojen ennustamiseksi.
Perinteiset menetelmät, kuten manuaalinen näytteenotto tai satelliittikuvaus, ovat kuitenkin osoittautuneet tehottomaksi, työvoimavaltaiseksi tai riittämättömän yksityiskohtaiseksi. Näiden haasteiden ratkaisemiseksi Fujianin maatalous- ja metsätalousyliopiston sekä Chengdun teknillisen yliopiston tutkijat kehittivät innovatiivisen tekoälymallin, joka perustuu YOLOv5-algoritmiin, joka on huippuluokan objektien tunnistusalgoritmi.
Heidän työnsä, joka julkaistiin Kasvimenetelmät (2025) saavutti merkittäviä tuloksia, mukaan lukien 93,1%:n keskiarvon tarkkuuden (mAP) – mittarin, joka mittaa kokonaisilmaisutarkkuutta – ja 75,6%:n laskun laskentakustannuksissa, mikä tekee siitä sopivan reaaliaikaisiin dronejen käyttöönottoihin.
Haasteet ja innovaatiot sadon seurannassa
Ylämaan ohran merkitys ulottuu sen pelkän ravinnonlähteen lisäksi. Pelkästään vuonna 2022 Rikaze City, merkittävä ohrantuotantoalue, korjasi 408 900 tonnia ohraa 60 000 hehtaarin alueella, mikä oli lähes puolet Tiibetin viljan kokonaistuotannosta.
Kulttuurisesta ja taloudellisesta merkityksestään huolimatta ohran satojen arviointi on pitkään ollut haastavaa. Perinteiset menetelmät, kuten manuaalinen laskenta tai satelliittikuvat, ovat joko liian työläitä tai niiltä puuttuu tarvittava tarkkuus yksittäisten ohran tähkien – kasvin jyviä kantavien osien, jotka ovat usein vain 2–3 senttimetriä leveitä – havaitsemiseksi.
Manuaalinen näytteenotto edellyttää viljelijöiltä pelto-osien fyysistä tarkastamista – prosessi, joka on hidas, subjektiivinen ja epäkäytännöllinen suurille tiloille. Satelliittikuvat, vaikka ne ovatkin hyödyllisiä laajoihin havaintoihin, kamppailevat alhaisen resoluution (usein 10–30 metriä pikseliä kohden) ja toistuvien säähäiriöiden, kuten pilvipeitteen, kanssa vuoristoalueilla, kuten Tiibetissä.
Näiden rajoitusten voittamiseksi tutkijat turvautuivat miehittämättömiin ilma-aluksiin (UAV) eli droneihin, joissa oli 20 megapikselin kamerat. Nämä dronet ottivat 501 korkearesoluutioista kuvaa Rikaze Cityn ohrapelloista kahden kriittisen kasvuvaiheen aikana: kasvuvaiheessa elokuussa 2022, jolle ovat ominaisia vihreät, kehittyvät tähdet, ja kypsymisvaiheessa elokuussa 2023, jolle ovat ominaisia kullankeltaiset, sadonkorjuuvalmiit tähdet.

Näiden kuvien analysointi kuitenkin toi mukanaan haasteita, kuten dronejen liikkeen aiheuttamat epäselvät reunat, ohran tähkien pieni koko ilmakuvissa ja päällekkäiset tähkät tiheästi istutetuilla pelloilla.
Näiden ongelmien ratkaisemiseksi tutkijat esikäsittelivät kuvat jakamalla jokaisen korkean resoluution kuvan 35 pienempään osakuvaan ja suodattamalla pois epäselvät reunat, jolloin saatiin 2 970 korkealaatuista osakuvaa koulutusta varten. Tämä esikäsittelyvaihe varmisti, että malli keskittyi selkeään ja toimivaan dataan, välttäen heikkolaatuisten alueiden aiheuttamat häiriötekijät.
Tekniset edistysaskeleet objektien havaitsemisessa
Keskeistä tässä tutkimuksessa on YOLOv5-algoritmi (You Only Look Once version 5), yksivaiheinen objektien tunnistusmalli, joka tunnetaan nopeudestaan ja modulaarisesta rakenteestaan. Toisin kuin vanhemmat kaksivaiheiset mallit, kuten Faster R-CNN, jotka ensin tunnistavat kiinnostuksen kohteena olevat alueet ja sitten luokittelevat objektit, YOLOv5 suorittaa tunnistuksen yhdellä kertaa, mikä tekee siitä huomattavasti nopeamman.
YOLOv5n-perusmalli, jossa oli 1,76 miljoonaa parametria (tekoälymallin konfiguroitavia komponentteja) ja 4,1 miljardia FLOPia (liukulukuoperaatioita, laskennallisen monimutkaisuuden mittari), oli jo tehokas. Pienten, päällekkäisten ohrapiikkien havaitseminen vaati kuitenkin lisäoptimointia.
Tutkimusryhmä esitteli malliin kolme keskeistä parannusta: syvyyssuunnassa erotettavan konvoluution (DSConv), haamukonvoluution (GhostConv) ja konvoluutiolohkohuomiomoduulin (CBAM).
Syvyyssuuntainen eroteltava konvoluutio (DSConv) vähentää laskentakustannuksia jakamalla standardin konvoluutioprosessin – matemaattisen operaation, joka poimii kuvista ominaisuuksia – kahteen vaiheeseen. Ensinnäkin syvyyssuuntainen konvoluutio kohdistaa suodattimia yksittäisiin värikanaviin (esim. punainen, vihreä, sininen) ja analysoi jokaisen kanavan erikseen.
Tätä seuraa pistekohtainen konvoluutio, jossa yhdistetään tulokset kanavien välillä käyttäen 1×1-ytimiä. Tämä lähestymistapa vähentää parametrien määrää jopa 75%.

Esimerkiksi perinteinen 3×3-konvoluutio, jossa on 64 tulo- ja 128 lähtökanavaa, vaatii 73 728 parametria, kun taas DSConv vähentää tämän vain 8 768:aan – 88%-vähennys. Tämä tehokkuus on kriittistä mallien käyttöönotossa droneissa tai mobiililaitteissa, joiden prosessointiteho on rajallinen.
Haamukonvoluutio (GhostConv) keventää mallia entisestään luomalla lisää ominaisuuskarttoja – yksinkertaistettuja kuvakuvioiden esityksiä – yksinkertaisten lineaaristen operaatioiden, kuten kiertämisen tai skaalaamisen, avulla resursseja kuluttavien konvoluutioiden sijaan.
Perinteiset konvoluutiokerrokset tuottavat tarpeettomia ominaisuuksia, jotka tuhlaavat laskentaresursseja. GhostConv ratkaisee tämän luomalla "haamu"-ominaisuuksia olemassa olevista, mikä käytännössä puolittaa parametrit tietyissä kerroksissa.
Esimerkiksi kerros, jossa on 64 tulo- ja 128 lähtökanavaa, vaatisi perinteisesti 73 728 parametria, mutta GhostConv supistaa tämän muotoon 36,864 säilyttäen samalla tarkkuuden. Tämä tekniikka on erityisen hyödyllinen pienten kohteiden, kuten ohranpiikkien, havaitsemisessa, jossa laskennallinen tehokkuus on ensiarvoisen tärkeää.
Konvoluutiolohkojen tarkkaavaisuusmoduuli (CBAM) integroitiin auttamaan mallia keskittymään kriittisiin ominaisuuksiin jopa täynnä olevissa ympäristöissä. Ihmisen visuaalisista järjestelmistä inspiroituneet tarkkaavaisuusmekanismit mahdollistavat tekoälymallien priorisoida kuvan tärkeitä osia.
CBAM käyttää kahdenlaisia huomioita: kanavahuomiota, joka tunnistaa tärkeät värikanavat (esim. vihreä kasvaville piikkien osille), ja spatiaalista huomioita, joka korostaa kuvan keskeisiä alueita (esim. piikkiryppäitä). Korvaamalla vakiomoduulit DSConv- ja GhostConv-moduuleilla ja sisällyttämällä CBAM:n tutkijat loivat virtaviivaisemman ja tarkemman mallin, joka on räätälöity ohran havaitsemiseen.
Toteutus ja tulokset
Mallin kouluttamiseksi tutkijat merkitsivät manuaalisesti 135 alkuperäistä kuvaa käyttämällä rajaavia laatikoita – suorakaiteen muotoisia kehyksiä, jotka merkitsevät ohranpiikkien sijainnin – ja luokittelemalla piikkien kasvu- ja kypsymisvaiheisiin. Tiedon lisäystekniikat – kuten kiertäminen, kohinan injektointi, peittäminen ja terävöittäminen – laajensivat tietojoukkoa 2 970 kuvaan, mikä paransi mallin kykyä yleistää erilaisissa kenttäolosuhteissa.
Esimerkiksi kuvien kiertäminen 90°, 180° tai 270° auttoi mallia tunnistamaan piikkejä eri kulmista, samalla kun kohinan lisääminen simuloi tosielämän epätäydellisyyksiä, kuten pölyä tai varjoja. Aineisto jaettiin harjoitusjoukkoon (80%) ja validointijoukkoon (20%), mikä varmisti luotettavan arvioinnin.
Koulutus tapahtui tehokkaalla järjestelmässä, jossa oli AMD Ryzen 7 -suoritin, NVIDIA RTX 4060 -näytönohjain ja 64 Gt RAM-muistia, käyttäen PyTorch-kehystä – suosittua syväoppimisen työkalua. Yli 300 koulutusepookkia (täydelliset läpikäynnit tietojoukon läpi), mallin tarkkuutta (oikeiden havaintojen tarkkuus), palautumiskykyä (kyky löytää kaikki olennaiset piikit) ja hävikkiä (virheprosentti) seurattiin huolellisesti.
Tulokset olivat silmiinpistäviä. Parannettu YOLOv5-malli saavutti tarkkuuden 92,2% (nousu lähtötilanteen 89,1%:stä) ja havaittavuuden 86,2%:n (nousu lähtötilanteen 83,1%:stä), ylittäen lähtötilanteen YOLOv5n:n 3,1%:llä molemmissa mittareissa. Sen keskimääräinen tarkkuus (mAP) – kattava mittari, joka laskee keskiarvon havaitsemistarkkuudelle kaikissa luokissa – oli 93,1%, yksittäisten pistemäärien ollessa 92,7% kasvuvaiheen piikkien ja 93,5% kypsymisvaiheen piikkien osalta.

Yhtä vaikuttavaa oli sen laskennallinen tehokkuus: mallin parametrit laskivat 70,6%:llä 1,2 miljoonaan, ja FLOP-arvot laskivat 75,6%:llä 3,1 miljardiin. Vertailuanalyysit johtavien mallien, kuten Faster R-CNN:n ja YOLOv8n:n, kanssa korostivat sen paremmuutta.
Vaikka YOLOv8n saavutti hieman korkeamman mAP:n (93,8%), sen parametrit (3,0 miljoonaa) ja FLOPit (8,1 miljardia) olivat vastaavasti 2,5- ja 2,6-kertaiset, mikä tekee ehdotetusta mallista huomattavasti tehokkaamman reaaliaikaisissa sovelluksissa.
Visuaaliset vertailut korostivat näitä edistysaskeleita. Kasvuvaiheen kuvissa parannettu malli havaitsi 41 piikkiä verrattuna lähtötilanteen 28:aan. Kypsymisen aikana se tunnisti 3 piikkiä verrattuna lähtötilanteen 2:een, ja havaitsematta jääneitä merkkejä (merkitty oransseilla nuolilla) ja vääriä positiivisia tuloksia (merkitty violeteilla nuolilla) oli vähemmän.
Nämä parannukset ovat elintärkeitä viljelijöille, jotka luottavat tarkkaan dataan satojen ennustamisessa ja resurssien optimoinnissa. Esimerkiksi tarkat tähkälaskennat mahdollistavat paremman arvion viljantuotannosta, mikä auttaa tekemään päätöksiä sadonkorjuun ajoituksesta, varastoinnista ja markkinasuunnittelusta.
Tulevaisuuden suunnat ja käytännön vaikutukset
Menestyksestä huolimatta tutkimuksessa tunnustettiin rajoitukset. Suorituskyky heikkeni äärimmäisissä valaistusolosuhteissa, kuten kovassa keskipäivän häikäisyssä tai voimakkaissa varjoissa, jotka voivat peittää piikkien yksityiskohdat. Lisäksi suorakaiteen muotoiset rajaavat laatikot eivät aina sopineet epäsäännöllisen muotoisiin piikkeihin, mikä aiheutti pieniä epätarkkuuksia.
Malli poisti myös miehittämättömien ilma-alusten kuvista epäselvät reunat, mikä vaati manuaalista esikäsittelyä – vaihe, joka lisää aikaa ja monimutkaisuutta.
Tulevassa työssä pyritään ratkaisemaan näitä ongelmia laajentamalla tietojoukkoa kattamaan aamunkoitteessa, keskipäivällä ja hämärässä otetut kuvat, kokeilemalla monikulmion muotoisia merkintöjä (joustavia muotoja, jotka sopivat paremmin epäsäännöllisiin kohteisiin) ja kehittämällä algoritmeja epätarkkojen alueiden käsittelemiseksi paremmin ilman manuaalisia toimia.
Tämän tutkimuksen vaikutukset ovat syvälliset. Tiibetin kaltaisten alueiden viljelijöille malli tarjoaa reaaliaikaisen sadon arvioinnin ja korvaa työläiden manuaalisten laskelmien tekemisen drone-pohjaisella automaatiolla. Kasvuvaiheiden erottaminen mahdollistaa tarkan sadonkorjuun suunnittelun ja vähentää ennenaikaisen tai viivästyneen sadonkorjuun aiheuttamia tappioita.
Yksityiskohtaiset tiedot piikkien tiheydestä – kuten alikansoitettujen tai ylikansoitettujen alueiden tunnistaminen – voivat auttaa kastelu- ja lannoitusstrategioissa, mikä vähentää veden ja kemikaalien hukkaa. Ohran lisäksi kevyt arkkitehtuuri on lupaava muillekin viljelykasveille, kuten vehnälle, riisille tai hedelmille, ja se avaa tien laajemmille sovelluksille täsmäviljelyssä.
Johtopäätös
Yhteenvetona voidaan todeta, että tämä tutkimus havainnollistaa tekoälyn mullistavaa potentiaalia maatalouden haasteiden ratkaisemisessa. Jalostamalla YOLOv5:tä innovatiivisilla kevyillä tekniikoilla tutkijat ovat luoneet työkalun, joka tasapainottaa tarkkuuden ja tehokkuuden – mikä on kriittistä tosielämän käyttöönotossa resurssirajoitteisissa ympäristöissä.
Termit kuten mAP, FLOP ja huomiomekanismit saattavat vaikuttaa teknisiltä, mutta niiden vaikutus on erittäin käytännöllinen: ne mahdollistavat viljelijöille datalähtöisten päätösten tekemisen, resurssien säästämisen ja satojen maksimoimisen. Ilmastonmuutoksen ja väestönkasvun lisätessä painetta maailmanlaajuisissa ruokajärjestelmissä tällaiset edistysaskeleet ovat välttämättömiä.
Tiibetin ja muiden maiden maanviljelijöille tämä teknologia ei edusta pelkästään loikkaa maatalouden tehokkuudessa, vaan myös toivon majakkaa kestävälle ruokaturvalle epävarmassa tulevaisuudessa.
Viite: Cai, M., Deng, H., Cai, J. ym. Kevyt ylämaan ohran tunnistus parannetun YOLOv5:n perusteella. Plant Methods 21, 42 (2025). https://doi.org/10.1186/s13007-025-01353-0






























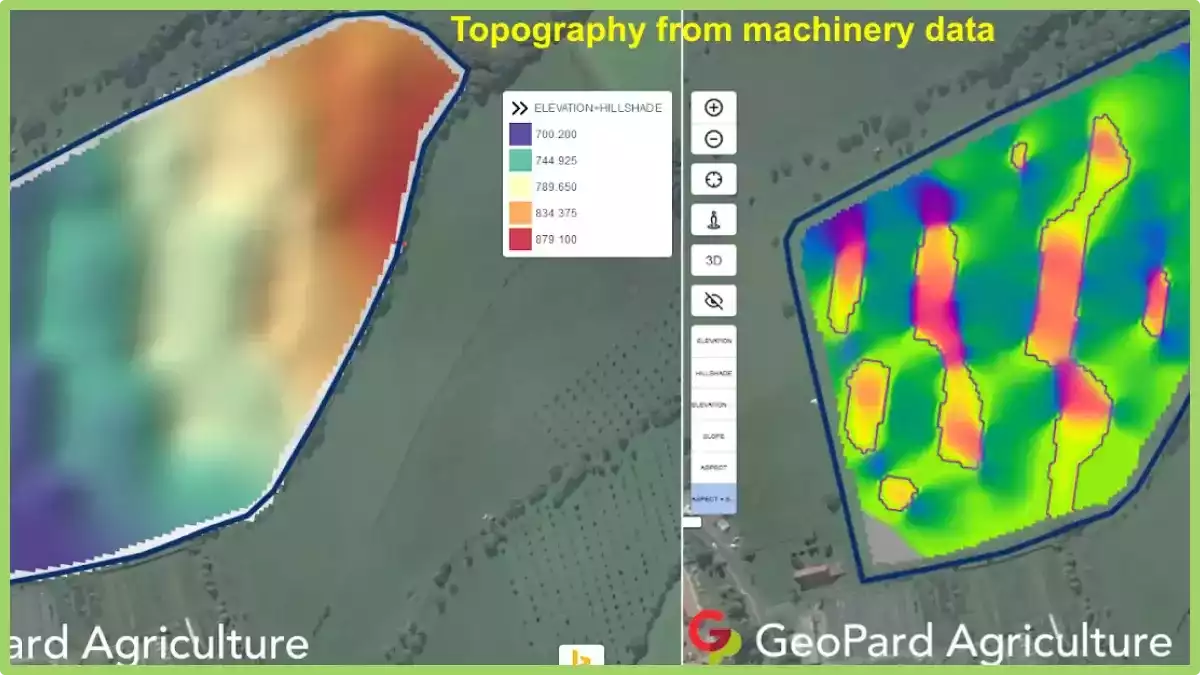
 Droonikartoitus toimii näin: drooniin asennetaan sensoreita, kuten kameroita ja laserskannereita, jotka lentävät alueen yli ja ottavat kuvia tai skannaavat sitä lasereilla eri korkeuksilla ja kulmissa. Kerätty data käsitellään sitten 3D-kartoiksi, joita voidaan katsella tietokoneen tai älypuhelimen näytöllä.
Droonikartoitus toimii näin: drooniin asennetaan sensoreita, kuten kameroita ja laserskannereita, jotka lentävät alueen yli ja ottavat kuvia tai skannaavat sitä lasereilla eri korkeuksilla ja kulmissa. Kerätty data käsitellään sitten 3D-kartoiksi, joita voidaan katsella tietokoneen tai älypuhelimen näytöllä.
 2. Lannoitteiden, rikkakasvien torjunta-aineiden ja torjunta-aineiden määräyskartat droonikartoituksella
Vain yksi strategia on vanhentunut, sillä se ei ainoastaan tuhlaa resursseja, vaan se voi myös vaikuttaa satojen terveyteen ja elinvoimaisuuteen. Esimerkiksi liika vesi voi tappaa muuten terveen sadon estämällä sen juuria imemästä happea, joten edes kastelu ei ole paras tapa kasvattaa virheettömiä satoja. Sama pätee lannoitteisiin; oikean määrän käyttö on ratkaisevan tärkeää kasvun kannalta, sillä liian monen käyttö aiheuttaa juurien palamista, mikä voi tuhota muuten terveitä kasveja. Droonikartoitus mahdollistaa ruiskutteiden suihkuttamisen vain ongelmakohtiin, mikä vähentää resurssien tuhlausta ja terveiden satojen vahingoittumisen riskiä, jotka eivät vaadi samaa käsittelyä. Vaikka ihmiset eivät pystyisi tunnistamaan kunkin kasvin ainutlaatuisia vaatimuksia sadostaan, droonikartoitusteknologia voi tehdä sen minuuteissa.
3. Sadon arviointi
Napin painalluksella tiedustelutehtävät käynnistetään; drone lähtee säänkestävästä latausasemasta, kerää dataa ja lataa sen palvelimelle. Dronen havaintoja sekä sen kasvien stressin havaitsemista ja mahdollisten nykyisten käsittelyjen tai muutosten tehokkuutta voidaan käyttää automaattisten kastelujärjestelmien mukauttamiseen. Paikan päällä olevien tiedusteludronien avulla jatkuvat terveystarkastukset ovat mahdollisia.
4. Kasvipopulaatioiden laskenta
Droonin tehokkaan tekoälyteknologian avulla voidaan tunnistaa minkä tahansa kasvilajikkeen. Tämä mahdollistaa koko tuotannon ja kokonaishävikin määrittämisen kunkin kauden alussa ja lopussa, mikä lisää tarkkuutta ja tietoisuutta kasvukauden onnistumisesta.
5. Automaattiset luokittelut drone-kuvantamisen avulla
Droonien kuvista voi päätellä, minkä tyyppisen maatalousmaan yli se lentää, onko se peltoa, laidunmaata vai sekalaista. Droonit voivat laskea satojen ja karjan määrän, kuten yllä on esitetty, varmistaakseen, että tiedot ovat ajan tasalla ja että mahdolliset tappiot on kirjattu.
6. Kasvien seuranta
Sadon terveys ei ole ennalta määrätty, koska ympäristötekijät voivat vaikuttaa kehitykseen. Lämpötila, kosteus, ravinto- ja hivenainepitoisuus, hyönteisten ja tautien esiintyminen, veden saatavuus ja auringonvalolle altistumisen määrä ovat kaikki huomioon otettavia tekijöitä. Kaikkia näitä voidaan seurata dronejen erilaisten hyötykuormien avulla, ja monia näistä aineettomista muuttujista voidaan hallita levittämällä vettä tai suihkeita suoraan tarvittaville alueille. Mitä terveellisempi sadon ympäristö on, sitä vahvempi sen immuunijärjestelmä on ja sitä terveempi se on – ja sillä on paljon parempi kyky torjua tuholaisia ja tauteja.
2. Lannoitteiden, rikkakasvien torjunta-aineiden ja torjunta-aineiden määräyskartat droonikartoituksella
Vain yksi strategia on vanhentunut, sillä se ei ainoastaan tuhlaa resursseja, vaan se voi myös vaikuttaa satojen terveyteen ja elinvoimaisuuteen. Esimerkiksi liika vesi voi tappaa muuten terveen sadon estämällä sen juuria imemästä happea, joten edes kastelu ei ole paras tapa kasvattaa virheettömiä satoja. Sama pätee lannoitteisiin; oikean määrän käyttö on ratkaisevan tärkeää kasvun kannalta, sillä liian monen käyttö aiheuttaa juurien palamista, mikä voi tuhota muuten terveitä kasveja. Droonikartoitus mahdollistaa ruiskutteiden suihkuttamisen vain ongelmakohtiin, mikä vähentää resurssien tuhlausta ja terveiden satojen vahingoittumisen riskiä, jotka eivät vaadi samaa käsittelyä. Vaikka ihmiset eivät pystyisi tunnistamaan kunkin kasvin ainutlaatuisia vaatimuksia sadostaan, droonikartoitusteknologia voi tehdä sen minuuteissa.
3. Sadon arviointi
Napin painalluksella tiedustelutehtävät käynnistetään; drone lähtee säänkestävästä latausasemasta, kerää dataa ja lataa sen palvelimelle. Dronen havaintoja sekä sen kasvien stressin havaitsemista ja mahdollisten nykyisten käsittelyjen tai muutosten tehokkuutta voidaan käyttää automaattisten kastelujärjestelmien mukauttamiseen. Paikan päällä olevien tiedusteludronien avulla jatkuvat terveystarkastukset ovat mahdollisia.
4. Kasvipopulaatioiden laskenta
Droonin tehokkaan tekoälyteknologian avulla voidaan tunnistaa minkä tahansa kasvilajikkeen. Tämä mahdollistaa koko tuotannon ja kokonaishävikin määrittämisen kunkin kauden alussa ja lopussa, mikä lisää tarkkuutta ja tietoisuutta kasvukauden onnistumisesta.
5. Automaattiset luokittelut drone-kuvantamisen avulla
Droonien kuvista voi päätellä, minkä tyyppisen maatalousmaan yli se lentää, onko se peltoa, laidunmaata vai sekalaista. Droonit voivat laskea satojen ja karjan määrän, kuten yllä on esitetty, varmistaakseen, että tiedot ovat ajan tasalla ja että mahdolliset tappiot on kirjattu.
6. Kasvien seuranta
Sadon terveys ei ole ennalta määrätty, koska ympäristötekijät voivat vaikuttaa kehitykseen. Lämpötila, kosteus, ravinto- ja hivenainepitoisuus, hyönteisten ja tautien esiintyminen, veden saatavuus ja auringonvalolle altistumisen määrä ovat kaikki huomioon otettavia tekijöitä. Kaikkia näitä voidaan seurata dronejen erilaisten hyötykuormien avulla, ja monia näistä aineettomista muuttujista voidaan hallita levittämällä vettä tai suihkeita suoraan tarvittaville alueille. Mitä terveellisempi sadon ympäristö on, sitä vahvempi sen immuunijärjestelmä on ja sitä terveempi se on – ja sillä on paljon parempi kyky torjua tuholaisia ja tauteja.