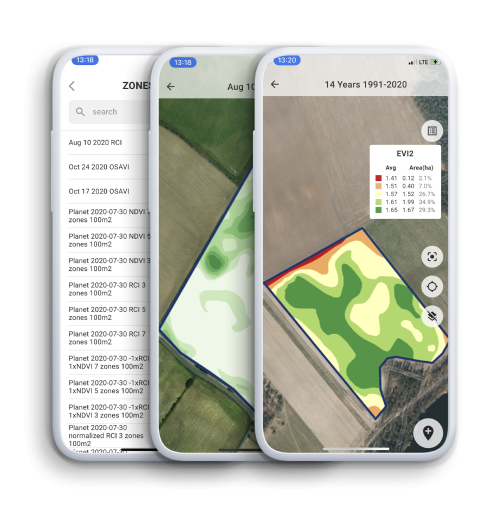
تُحدث الطائرات بدون طيار (UAVs)، أو الطائرات المسيرة، ثورة في الزراعة الحديثة من خلال توفير صور جوية سريعة للحقول. تُستخدم لمسح المحاصيل للكشف عن صحتها، ومرحلة نموها، والآفات، والأعشاب الضارة، وتقدير المحصول. على سبيل المثال، تمتلك الصين الآن أكثر من 250 ألف طائرة زراعية بدون طيار قيد التشغيل، وفي تايلاند، تمت تغطية حوالي 30% من الأراضي الزراعية بالرش أو المراقبة بالطائرات بدون طيار بحلول عام 2023. تجعل هذه الطائرات بدون طيار الزراعة أكثر كفاءة من خلال اكتشاف المشكلات بسرعة (مثل تفشي الآفات أو إجهاد المياه) التي قد يتم تفويتها على الأرض.
ومع ذلك، تمتلك الطائرات الصغيرة بدون طيار قدرة حاسوبية محدودة للغاية على متنها وعمر بطارية قصير. ولذلك، فإن تشغيل خوارزميات رؤية الذكاء الاصطناعي المعقدة عليها في الوقت الفعلي يمثل تحديًا. لا يمكن لنماذج اكتشاف الأجسام التقليدية خفيفة الوزن (مثل نماذج YOLO الصغيرة أو تلك المستندة إلى MobileNet) تلبية هذه الاحتياجات جزئيًا فقط: فهي غالبًا ما تضحي بالدقة أو السرعة وتتطلب ضبطًا يدويًا كبيرًا. هذه الفجوة تحفز البحث الآلي عن بنى الشبكات العصبية (NAS) المدركة للنشر: وهي طريقة تصميم آلية تصمم نماذج التعلم العميق لتلبية المتطلبات الدقيقة للطائرات بدون طيار المنشورة ميدانياً.
تستخدم الزراعة الدقيقة الحديثة الطائرات بلا طيار (الدرونز) لمسح الحقول ومراقبة حالة المحاصيل. من خلال التحليق فوق مساحات واسعة، يمكن للدرونز جمع صور عالية الدقة للنباتات والتربة وأنماط الحقول. يتم تغذية هذه الصور بخوارزميات رؤية الكمبيوتر التي تكتشف الأعشاب الضارة بين المحاصيل، وتقدر الإنتاجية (مثل عد الثمار أو السنابل)، أو تكتشف علامات مبكرة للمرض أو نقص المغذيات. على سبيل المثال، تسمح الدرونز بالرش المستهدف لمبيدات الأعشاب على بقع الأعشاب الضارة، مما يقلل من استخدام المواد الكيميائية والتكاليف.
ومع ذلك، فإن أجهزة الكمبيوتر الصغيرة الموجودة على متن الطائرات بدون طيار (والتي غالبًا ما تقتصر على بضعة واط من الطاقة) تكافح لتشغيل الشبكات العصبية الكبيرة بسرعة الطيران. هذا يجعل من الصعب إجراء تحليل في الوقت الفعلي: إذا اكتشفت طائرة بدون طيار مشكلة، فإنها تحتاج إلى الاستجابة بسرعة أو تسجيل البيانات قبل نفاد البطارية. تم تصميم الكواشف خفيفة الوزن الحالية (على سبيل المثال، YOLOv8 nano، YOLO-tiny، MobileNets) يدويًا وغالبًا ما تتضمن مفاضلات: جعل النموذج أصغر يسرّع تشغيله، ولكنه يمكن أن يضر بالدقة.
ونتيجة لذلك، هناك حاجة ماسة لطرق تجد تلقائيًا أفضل نموذج ممكن في ظل قيود الطائرة بدون طيار. يتناسب NAS المدرك للنشر مع هذه الحاجة من خلال البحث عن هياكل الشبكات العصبية التي تعمل على تحسين دقة الكشف واستهلاك الموارد (الكمون، الطاقة، الذاكرة) بشكل مشترك في ظل ظروف الطائرة بدون طيار الحقيقية. يمكن لهذا النهج تقديم نماذج متخصصة تعمل بكفاءة على أجهزة الطائرات بدون طيار مع الحفاظ على دقتها العالية لمهام مراقبة المحاصيل.
متطلبات اكتشاف الأجسام بالطائرات المسيرة في مراقبة المحاصيل
تؤدي طائرات الاستطلاع الزراعية غير المأهولة مهام اكتشاف بصري متنوعة، ولكل منها متطلباته الخاصة:
1. صحة المحاصيل وكشف الإجهاد: تستخدم الطائرات بدون طيار كاميرات RGB أو حرارية أو متعددة الأطياف لتحديد النباتات المجهدة أو نقص المغذيات أو أعراض الأمراض. يمكن للخوارزميات في الوقت الفعلي رسم خرائط لتباين الحقول، وتوجيه الري أو التسميد. يسمح الكشف الدقيق عن علامات إجهاد النبات بالتدخلات في الوقت المناسب لإنقاذ المحصول.
2. التعرف على الأعشاب الضارة: إن اكتشاف الأعشاب الضارة بين المحاصيل يسمح للمزارعين برش النباتات غير المرغوب فيها فقط، مما يوفر مبيدات الأعشاب. على سبيل المثال، استخدمت دراسة على حقول القطن صورًا من طائرات بدون طيار مع كاشف يعتمد على YOLOv7 وحققت حوالي 83% دقة في فصل الأعشاب الضارة عن القطن. ومع ذلك، لا يزال التمييز بين الأعشاب الضارة التي تشبه المحاصيل بصريًا صعبًا في صور الحقول المزدحمة.

3. الكشف عن الآفات والأمراض: يمكن للطائرات المسيرة اكتشاف تفشي الآفات (مثل الجراد أو الحشرات أو لفحة الفطريات) في وقت مبكر مقارنة بالبشر على الأقدام. تدعم الطائرات المسيرة أيضًا رسم خرائط للمناطق المصابة بالآفات عبر التصوير متعدد الأطياف، مما يحسّن على استخدام الألوان الثلاثة (RGB) وحدها. الكشف السريع والدقيق عن الآفات أمر بالغ الأهمية لمنع انتشارها.
4. تقدير العائد: يساعد عد الفواكه أو رؤوس الحبوب أو النباتات من الجو في التنبؤ بكميات الحصاد. يمكن للنماذج المدربة للكشف عن التفاح أو البطيخ أو رؤوس القمح في صور الطائرات بدون طيار تسريع تقدير الإنتاج. على سبيل المثال، تم استخدام الشبكات العصبية على صور الطائرات بدون طيار لحساب محاصيل البطيخ في الحقول.
5. المسح ورسم الخرائط: كما تنشئ الطائرات بدون طيار خرائط ميدانية (التضاريس، اختلافات التربة) تساعد في تخطيط الزراعة. على الرغم من أنها ليست اكتشافًا دقيقًا للأشياء، إلا أن هذا يشكل جزءًا من مراقبة الطائرات بدون طيار.
غالبًا ما تتطلب هذه المهام استدلالًا في الوقت الفعلي تقريبًا: قد تحتاج طائرة بدون طيار تحلق فوق الحقول إلى معالجة إطارات الفيديو فورًا (عدة إطارات في الثانية) بحيث يمكن اتخاذ قرارات التحكم (مثل تعديل الارتفاع أو تفعيل الرشاش) على الفور. في حالات أخرى، قد تكون التأخيرات الطفيفة (ثوانٍ) مقبولة إذا تم تسجيل البيانات وتحليلها بعد الهبوط.
بشكل هام، يجب أن تعالج رؤية الطائرات المسيرة التباين البيئي: ضوء الشمس الساطع، الظلال، ضبابية الحركة المحفزة بالرياح، الانسداد بسبب تداخل الأوراق، أو التغيرات في الارتفاع والزاوية. تختلف أحجام الكائنات (الأعشاب الضارة القريبة مقابل مجموعات الآفات البعيدة)، لذلك يجب أن تتعامل أجهزة الكشف مع ميزات متعددة المقاييس.
أخيرًا، تتضمن مهام الطائرات المسيرة الزراعية مقايضات صارمة بين الدقة والتأخير والطاقة. هناك حاجة إلى دقة كشف عالية لتجنب فقدان الأعشاب الضارة أو الآفات، ولكن تشغيل شبكة عميقة جدًا يمكن أن يستنزف البطارية بسرعة. لذلك، يجب أن يكون نموذج الكشف سريعًا وفعالاً للطاقة مع الحفاظ على دقته الكافية للمهمة. هذه المتطلبات الصارمة تسلط الضوء على سبب الحاجة إلى تصميم نماذج متخصصة للطائرات المسيرة في الزراعة.
كواشف الكائنات خفيفة الوزن لمنصات الطائرات بدون طيار
كاشفات الأجسام خفيفة الوزن هي شبكات عصبية مصممة خصيصًا للعمل على أجهزة محدودة. غالبًا ما تستخدم هياكل أساسية صغيرة (مثل MobileNet أو ShuffleNet)، أو تقلل من عدد طبقاتها، أو تبسط تصميمات الرقبة/الرأس. على سبيل المثال، تتضمن نماذج عائلة YOLO إصدارات “نانو” و “تايني” (مثل YOLOv8n، YOLOv5s) التي تحتوي على عدد أقل من المعلمات وتتطلب عمليات حسابية أقل (FLOPs).
يمكن تشغيل هذه الكواشف بسرعة عشرات الإطارات في الثانية على أجهزة مدمجة مثل NVIDIA Jetson Nano أو Google Coral. على سبيل المثال، كان Ag-YOLO كاشفًا مخصصًا يعتمد على YOLO لمزارع نخيل التمر، والذي يعمل بسرعة 36.5 إطارًا في الثانية على Intel Neural Compute Stick 2 (باستخدام 1.5 وات فقط) وحقق دقة عالية (F1 = 0.9205). استخدم هذا النموذج عددًا أقل من المعلمات بحوالي 12 مرة مقارنة بـ YOLOv3-Tiny مع مضاعفة سرعته.

توضح هذه الأمثلة المفاضلات في تصميم النموذج: تقليل حجم النموذج أو تعقيده (على سبيل المثال، عدد أقل من الطبقات أو القنوات) عادةً ما يسرع الاستدلال ويقلل من استهلاك الطاقة، ولكنه قد يقلل من الدقة. ضحى Ag-YOLO ببعض القدرة لاكتساب السرعة والكفاءة، ومع ذلك حافظ على درجة F1 عالية بلغت 0.92 في مهمته.
وبالمثل، تمت مقارنة ثلاثة متغيرات من YOLOv7 للكشف عن الأعشاب الضارة: حقق YOLOv7 الكامل دقة% 83، بينما انخفضت شبكة YOLOv7-w6 الأصغر إلى دقة% 63. يوضح هذا أحد قيود أجهزة الكشف خفيفة الوزن العامة: قد لا تعمل النماذج المُحسّنة لبيئة معينة أو نوع كائن معين بشكل جيد على بيئة أخرى. قد يفوت جهاز الكشف الذي تم تصغيره للسرعة الإشارات الدقيقة (على سبيل المثال، الأعشاب الصغيرة أو المموهة)، مما يضر بالصلابة في ظل ظروف متفاوتة.
في الزراعة، قد لا تكون هذه الشبكات الخفيفة الوزن العامة مثالية دون تعديل إضافي. على سبيل المثال، قد لا يتعامل نموذج YOLOv7 المدرب مسبقًا على مجموعات بيانات شائعة مع الأنسجة والمقاييس الفريدة لصور المحاصيل بشكل مثالي. بالتالي، هناك حاجة إلى تحسين خاص بالمهمة والمنصة لبنية النموذج. يعد الضبط اليدوي (تغيير الطبقات، والمرشحات، وما إلى ذلك) لكل نوع جديد من الطائرات بدون طيار أو صنف محصولي كثيف العمالة. هذا يحفز الطرق الآلية - مثل NAS المدركة للنشر - للعثور على أفضل توازن بين الحجم والدقة والمتانة لمنصة طائرة بدون طيار معينة وتطبيق زراعي معين.
بحث البنية العصبية في أنظمة الرؤية المعتمدة على الطائرات بدون طيار
البحث الآلي عن البنى العصبية (NAS) هو طريقة آلية لتصميم بنى الشبكات العصبية. بدلاً من تحديد عدد الطبقات، والمرشحات، والاتصالات يدوياً، يستخدم NAS خوارزميات (التعلم المعزز، الأساليب التطورية، أو البحث المستند إلى التدرج) لاستكشاف مساحة من التصاميم الممكنة وإيجاد تلك التي تحسن هدفاً مختاراً (مثل الدقة).
تم بالفعل تطبيق NAS لإنشاء شبكات متوافقة مع الأجهزة المحمولة. على سبيل المثال، كان MnasNet من Google من أوائل تطبيقات NAS “المدركة للمنصة” التي تضمنت زمن الاستجابة الفعلي للجهاز مباشرة في الهدف. قاس MnasNet وقت الاستدلال على هاتف Google Pixel لكل نموذج مرشح أثناء البحث، وواوازن الدقة مقابل زمن الاستجابة المقاس هذا. وكانت النتيجة عائلة من شبكات CNN التي كانت سريعة ودقيقة على الأجهزة المحمولة، وتفوقت على نماذج MobileNets وNASNet المصممة يدويًا على ImageNet.
ومع ذلك، تركز أساليب البحث عن بنية الشبكة العصبية العامة (NAS) مثل MnasNet على مهام الرؤية العامة (تصنيف صور ImageNet أو اكتشاف كائنات COCO) والأجهزة العامة (مثل الهواتف المحمولة). بالنسبة لمراقبة المحاصيل باستخدام الطائرات بدون طيار، تكون المشكلة أكثر تخصصاً. نريد كاشفات محسّنة لفئات كائنات محددة (نباتات، أعشاب ضارة، آفات) ومصممة خصيصاً لمستشعرات الطائرات بدون طيار وملف تعريف رحلاتها. قد يهمل البحث عن بنية الشبكة العصبية العامة الذي يحسّن الدقة أو زمن الاستجابة العام فقط التفاصيل الدقيقة مثل اكتشاف الكائنات الصغيرة أو قيود الطاقة.
أيضًا، يمكن أن تكون طرق NAS التقليدية مكلفة حسابيًا للغاية (غالبًا ما تتطلب أيامًا على مجموعات GPU كبيرة)، وهو أمر غير عملي دائمًا لباحثي الزراعة. لذلك، هناك حاجة لأطر عمل NAS الخاصة بالمهمة لرؤية الطائرات بدون طيار. يجب أن تتضمن هذه معايير خاصة بالطائرات بدون طيار وأن تكون فعالة قدر الإمكان.
في جميع الحالات، يعتبر الوعي بالقيود أمرًا بالغ الأهمية: يجب أن يكون نظام NAS واعيًا بقيود الجهاز المستهدف (على غرار MnasNet) ومتطلبات الوقت الفعلي لمهام الطائرات المسيرة أثناء الطيران. إذا كان البحث بطيئًا جدًا أو تجاهل استهلاك الطاقة، فقد لا يعمل النموذج الناتج بشكل جيد في الميدان.
في الممارسة العملية، تتضمن شبكة البحث عن الهياكل (NAS) لرؤية المركبات الجوية غير المأهولة (UAV) زمن الاستجابة واستهلاك الطاقة للأجهزة مباشرة في مقياس البحث. على سبيل المثال، يمكن للمرء قياس معدل إطارات الكاشف المرشح على كمبيوتر الطائرة بدون طيار الفعلي (مثل NVIDIA Jetson) واستخدامه كدرجة. هذا يتناقض مع استخدام وكلاء بسيطين مثل FLOPs، والتي لا تلتقط السرعة في العالم الحقيقي.
بهذه الطريقة، يمكن لـ NAS اكتشاف الهياكل التي تستغل قدرات الجهاز على أفضل وجه. باختصار، تقدم NAS طريقة لتصميم الكاشفات تلقائيًا للطائرات المسيرة، ولكن يجب تكييفها لمراعاة المهام الخاصة بالطائرات المسيرة ومتطلبات الكفاءة.
شبكات NAS المدركة للنشر: المبادئ الأساسية
يوسع البحث عن الشبكات العصبية الواعية بالنشر (Deployment-aware NAS) البحث عن الشبكات العصبية الواعية بالأجهزة (hardware-aware NAS) من خلال تضمين سياق النشر والقيود البيئية في عملية التصميم. بعبارة أخرى، فهو لا يأخذ في الاعتبار فقط أجهزة الطائرة بدون طيار (سرعة وحدة المعالجة المركزية/وحدة معالجة الرسومات، حدود الذاكرة، ميزانية الطاقة)، ولكن أيضًا ما ستواجهه الطائرة بدون طيار فعليًا في الميدان. وهذا يعني التحسين الصريح لمقاييس مثل زمن الاستجابة للاستنتاج على الجهاز المستهدف، واستهلاك الطاقة، والحجم للذاكرة، كل ذلك مع السعي للحصول على دقة اكتشاف عالية.
على سبيل المثال، أثناء NAS، يمكن نشر كل نموذج مرشح على جهاز Jetson Nano متصل بالطائرة المسيّرة وتسجيل وقت الاستدلال الفعلي واستهلاك الطاقة. يساعد هذا التغذية الراجعة التجريبية في توجيه البحث نحو النماذج التي تلبي معايير النشر فعليًا.
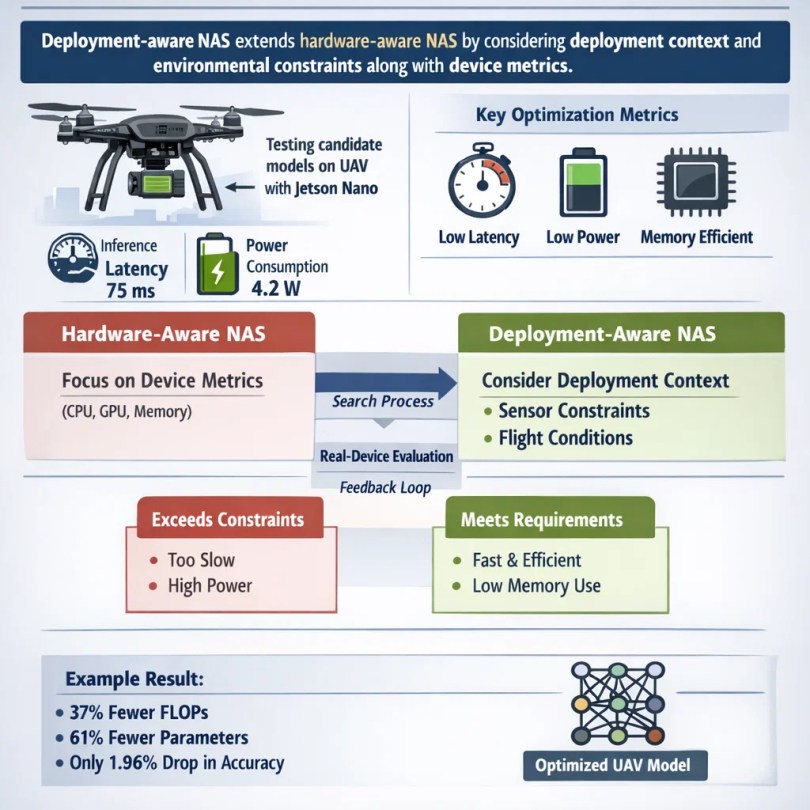
يركز التصميم الشبكي الواعي بالأجهزة (مثل MnasNet) على مقاييس الجهاز، بينما يذهب التصميم الشبكي الواعي بالنشر إلى أبعد من ذلك: فقد يأخذ في الاعتبار خصائص مدخلات المستشعرات (مثل دقة الصورة، وقنوات الطيف المتعدد) وأهداف زمن استجابة التطبيق (الإطارات المطلوبة في الثانية). يمكنه حتى دمج قيود الطيران مثل الحد الأقصى للذاكرة المسموح بها أو تضمين تقييمات في ظل ظروف اهتزاز الرياح المحاكاة أو ضبابية الحركة.
قد تعاقب شبكات NAS المدركة للنشر البنى التي تتجاوز، على سبيل المثال، استهلاك طاقة 5 واط أو التي تتطلب ذاكرة أكثر مما يمتلكه الدرون. من خلال القيام بذلك، يميل البحث بشكل طبيعي نحو النماذج العملية لتشغيل ميداني للطائرة بدون طيار. في جوهرها، يتعلق NAS المدرك للنشر بإغلاق الحلقة بين تصميم النموذج والاستخدام في العالم الواقعي. بدلاً من اختيار بنية واحدة على حدة والأمل في أن تعمل، فإنها تتضمن بشكل منهجي اختبار الأجهزة الحقيقية أثناء البحث.
على سبيل المثال، استخدم Kerec وآخرون (2026) مثل هذه الأطر للبحث عن كاشف طائرات مسيرة: فقد بنوا على أساس YOLOv8n ولكنهم أدرجوا زمن استجابة Jetson Nano وطاقته في البحث. كان النموذج الناتج يحتوي على% جيجافلوبس أقل و% معلمة أقل بنسبة 61 مقارنة بـ YOLOv8n، مع انخفاض بنسبة 1.96 فقط في mAP. هذا يوضح بوضوح كيف وجهت قيود النشر NAS إلى شبكة أخف وأسرع بكثير.
دور الشبكات العصبية لاتخاذ القرار المستند إلى التنبؤ في مراقبة الزراعة الدقيقة
يمكن لـ NAS المدرك للتطبيق أن يحسن بشكل كبير مراقبة المحاصيل بواسطة الطائرات بدون طيار من خلال تخصيص الكواشف للظروف الزراعية. على سبيل المثال، يمكن أن يفضل البحث البنيات التي تتفوق في اكتشاف الأجسام الصغيرة والرفيعة (مثل الأعشاب الضارة الضيقة أو شتلات الذرة الرفيعة) أو في التمييز بين النباتات وخلفيات التربة. يمكنه تعديل عمق الشبكة ومجالات الاستقبال لارتفاع الطيران النموذجي: على ارتفاع منخفض، تملأ الأجسام الصورة وقد تتطلب تفاصيل دقيقة، بينما على ارتفاع أعلى يجب أن تكون الشبكة جيدة في الكشف على نطاق صغير. يمكن لـ NAS المدرك للتطبيق ترميز هذه المتطلبات في مساحة بحثه.
السرعة أمر بالغ الأهمية في الميدان. تخيل أن طائرة بدون طيار تكتشف تفشي آفة؛ إذا كان النموذج سريعًا بما يكفي لمعالجة الفيديو بمعدل، على سبيل المثال، 30 إطارًا في الثانية، فيمكنه تنبيه الطيار أو تشغيل إجراء علاج فوري. في الاختبارات، كان نموذج مصمم بـ NAS أسرع بمقدار 28% على Jetson Nano من YOLOv8n القياسي، وذلك بفضل بنيته المحسّنة. كما أنه استخدم طاقة أقل بمقدار 18.5% تحت ONNX runtime، مما يعني أن الطائرة بدون طيار يمكن أن تطير لفترة أطول بنفس البطارية. هذه المكاسب تجعل اتخاذ القرارات أثناء الطيران أكثر جدوى وتمتد مدة المهمة.
المتانة فائدة أخرى. نظرًا لأن NAS الواعي بالانتشار يتضمن تقييمًا فعليًا للجهاز، يمكن أن يشمل البحث اختبارات في ظل ظروف متفاوتة. على سبيل المثال، قد يحاكي الإضاءة المنخفضة أو يتضمن صور تدريب من الفجر والغسق، مما يضمن احتفاظ الكاشف النهائي بالدقة تحت تغيرات الطقس والإضاءة الحقيقية. أظهر العمل أن الكاشف المشتق من NAS تعمم بشكل جيد: لقد اختبروه على مجموعتي بيانات محاصيل مختلفتين (رؤوس القمح وبادرات القطن) ووجدوا أداءً قويًا في كليهما.

يشير هذا إلى أن NAS المدرك للنشر ساعد في العثور على ميزات مشتركة ومفيدة للزراعة، مما يحسن التعميم على حقول جديدة. بشكل عام، يساعد NAS المدرك للنشر في موازنة الدقة مع وقت طيران أطول. من خلال تقليل الحسابات، تستخدم الطائرات بدون طيار طاقة أقل ويمكنها تغطية المزيد من المساحة لكل شحنة بطارية، كل ذلك مع الاستمرار في اكتشاف المحاصيل والآفات بشكل موثوق.
تصميم مساحة البحث لكاشفات طائرات الاستطلاع الزراعية
جزء هام من NAS المدرك للنشر هو مساحة البحث - مجموعة التصميمات الشبكية الممكنة التي ينظر فيها. بالنسبة لكواشف المحاصيل بدون طيار (UAV)، يمكن صياغة مساحة البحث لتشمل بنى واعدة لهذا المجال. وتشمل الأجزاء الرئيسية:
1. تصميم العمود الفقري: العمود الفقري هو مستخلص الميزات. بالنسبة للطائرات بدون طيار، قد يتضمن المرء كتل بناء تلافيفية خفيفة الوزن مثل الالتفافات القابلة للفصل بواسطة العمق (كما هو مستخدم في MobileNet)، أو كتل البقايا المقلوبة. تشتهر كتل البقايا المقلوبة وعنق الزجاجة الخطي (أسلوب MobileNetV2) بالكفاءة على الأجهزة المحمولة. يمكن لمساحة البحث أن تسمح بتغيير العرض (عدد القنوات) والعمق لكل كتلة لتتناسب مع ميزانية الحوسبة الخاصة بالطائرة بدون طيار. قد يتم أيضًا تضمين وحدات مستوحاة من الانتباه أو المحولات إذا كانت الطائرة بدون طيار يمكن تحملها بتكلفة طاقة منخفضة.
2. تصميم الرقبة: تستخدم العديد من كاشفات الكائنات أهرامات الميزات (FPN) أو شبكات تجميع المسار لدمج ميزات متعددة المقاييس. يمكن أن يستكشف البحث شبكات FPN مبسطة أو تجميع الميزات خفيف الوزن. على سبيل المثال، يمكن أن يكون استخدام رأس أحادي المقياس مقابل رؤوس متعددة المقاييس خيارات. قد تسمح المساحة بطبقات التجميع أو وصلات التخطي التي تساعد في اكتشاف الكائنات بأحجام مختلفة.
3. تصميم الرأس: يمكن أيضًا تغيير رأس الكشف (طبقات التصنيف وانحدار الصندوق). بالنسبة للطائرات بدون طيار التي تبحث في الحقول المنتظمة، قد يكفي رأس أبسط. ولكن لالتقاط الحشائش الصغيرة، قد يتضمن البحث طبقات تلافيفية إضافية أو مخططات تثبيت مختلفة.
4. عمليات خفيفة الوزن: يمكن لمساحة البحث أن تسمح بشكل صريح فقط بالعمليات منخفضة التكلفة. على سبيل المثال، الاختيار بين عملية التفاف 3×3 مقابل عملية التفاف مفككة أرخص 1×3+3×1، أو تضمين وحدات GhostNet. يمكنها أيضًا السماح بأحجام نواة صغيرة أو أبعاد مخفضة للحد من الحسابات. كل هذه الخيارات مدفوعة بالأجهزة. قد تمنع المساحة أي تكوين طبقة يتجاوز حد ذاكرة الطائرة المسيرة أو عتبة الطاقة المتوقعة.
من خلال تصميم مساحة البحث هذه بعناية، يتم توجيه عملية NAS نحو معماريات فعالة وذات كفاءة. قد تكون النتيجة مزيجًا جديدًا من الكتل التي لم يتم النظر فيها في النماذج القياسية. استخدم أفضل كاشف تم العثور عليه خيارات كتل مخصصة قللت GFLOPs بنسبة 37% والمعلمات بنسبة 61% مقارنة بـ YOLOv8n.
كان هذا ممكنًا لأن الشبكة العصبية القابلة للتطوير (NAS) يمكنها المزج بين عناصر العمود الفقري والرأس تحت قيود الطائرات بدون طيار. باختصار، تركز مساحة البحث لكاشفات الطائرات بدون طيار الزراعية على كتل بناء قابلة للتطوير وخفيفة الوزن والتعامل مع المقاييس المتعددة، كل ذلك ضمن حدود الأجهزة الموجودة على متن الطائرة.
أهداف التحسين والقيود
يجب على NAS المدركة للنشر التوفيق بين أهداف متعددة. وعادةً ما يكون الهدف الأساسي هو دقة الكشف (على سبيل المثال متوسط الدقة، mAP)، كما يتم قياسها على مجموعات بيانات رصد المحاصيل. على سبيل المثال، يعد mAP@50 (الدقة عند 50% IOU) مقياسًا شائعًا. لم يشهد النموذج المحسّن من قبل NAS سوى انخفاض 1.96% في mAP@50 مقارنةً بنموذج YOLOv8n الأساسي، وهي خسارة صغيرة جدًا مقابل المكاسب المحققة. يتم النظر أيضًا في الدقة والاستدعاء (أو درجة F1) على الفئات الرئيسية (الأعشاب الضارة والمحاصيل).
في نفس الوقت، يجب تحسين زمن الاستجابة والطاقة. زمن الاستجابة هو وقت الاستدلال لكل صورة؛ بالنسبة لوحدة معالجة رسومات مدمجة، قد يكون 20-50 مللي ثانية أو أكثر. يعني زمن الاستجابة الأقل معدلات إطارات أعلى. يعد استهلاك الطاقة (جول لكل إطار) أمرًا بالغ الأهمية لتحمل الطيران. بصمة الذاكرة (عدد المعلمات، حجم النموذج) هي قيد آخر؛ يجب أن تتناسب النماذج مع ذاكرة الوصول العشوائي للجهاز. لذلك، عادةً ما تحدد NAS هدفًا أو عقوبة لهذه القيود.
على سبيل المثال، قد يتم تخفيض مرتبة أي نموذج أبطأ من عتبة معينة أو يتجاوز ميزانية معينة من المعلمات. هذا يحول بشكل فعال بحث بنية الشبكة العصبية إلى مشكلة تحسين متعددة الأهداف: زيادة الدقة مع تقليل زمن الاستجابة والطاقة والحجم.
عمليًا، يمكن تحقيق ذلك عن طريق مجموع موزون للأهداف أو عن طريق قيود صارمة. تمنح بعض الطرق عقوبة كبيرة لأي مرشح يتجاوز حد طاقة طائرة بدون طيار. يحسب البعض الآخر بشكل صريح مقياس طاقة: تم اختبار النماذج تحت بيئة تشغيل ONNX لقياس “كفاءة الطاقة”، وكان أفضل نموذج +18.5% أكثر كفاءة في استخدام الطاقة من YOLOv8n. كان هذا أحد الأهداف التي وجهت بحثهم.
يمكن تصور المفاضلات التي تم العثور عليها على حدود باريتو: على أحد الطرفين، نماذج صغيرة سريعة للغاية بدقة أقل؛ وعلى الطرف الآخر، نماذج كبيرة دقيقة بطيئة جدًا أو تستهلك الكثير من الطاقة للطائرة بدون طيار. يهدف NAS الذي يراعي عملية النشر إلى إيجاد نقطة مثالية على هذه الحدود تتناسب مع أولويات المهمة الفعلية (مثل خسارة طفيفة في الدقة مقابل تسريع كبير). باختصار، يجب على NAS النظر في مقاييس الدقة (mAP، F1) وقيود الاستدلال (مللي ثانية لكل إطار، جول لكل إطار، الذاكرة) معًا. هذا التحسين المتوازن هو ما يجعل النموذج جاهزًا للنشر حقًا للاستخدام في طائرات بدون طيار.
التدريب والتقييم في بيئات زراعية واقعية
لكي تعمل الكواشف التي تم العثور عليها بواسطة NAS بشكل جيد، يجب تدريبها واختبارها على بيانات زراعية واقعية. هذا يعني استخدام مجموعات بيانات تلتقط تنوع الحقول الحقيقية: أنواع محاصيل مختلفة، مراحل نمو، مواسم، ظروف إضاءة، وارتفاعات. على سبيل المثال، قد لا يعمم التدريب على صور لبراعم الذرة الصغيرة فقط، ما يصل إلى رؤوس القمح الناضجة. تضمن مجموعات البيانات الممثلة للحقل أن يتعلم النموذج السمات المهمة في المزرعة. يمكن أيضًا تطبيق زيادة البيانات (الاقتصاص العشوائي، تغييرات السطوع، ضباب الحركة) أثناء التدريب لمحاكاة حركة الطائرة بدون طيار والإضاءة.

عند التقييم، من المهم اختبار النموذج في ظروف واقعية قدر الإمكان. يمكن لأدوات المحاكاة المساعدة (على سبيل المثال، تحليق طائرة بدون طيار افتراضية فوق حقول ثلاثية الأبعاد) ولكن اختبارات الطيران الفعلية هي المعيار الذهبي. يتم إجراء قياس الأداء على متن الطائرة عن طريق تشغيل النموذج على أجهزة الطائرات بدون طيار الفعلية. بعد NAS، تم نشر المرشح على Jetson Nano وقياس% 28.1 انفار أسرع (مقارنة بالنموذج الأساسي YOLOv8n) واستهلاك طاقة أفضل. يؤكد هذا النوع من ردود الفعل من الجهاز الفعلي أن البحث أنتج نموذجًا يلبي المتطلبات حقًا.
التعميم مهم أيضاً. قد يتم البحث عن نموذج وتدريبه على محصول واحد (مثل القمح)، لكن المزارعين يحتاجون إلى كاشفات تعمل عبر الحقول. أظهرت الدراسة تعميماً قوياً عبر المحاصيل: ظل الكاشف المستمد من NAS والمدرب على مهمة واحدة يؤدي بشكل جيد على مجموعة بيانات محصول مختلف (شتلات القطن) دون إعادة تدريب. يشير هذا إلى أن NAS المدركة للنشر يمكن أن تنتج هياكل قوية. ومع ذلك، قد تتطلب تحولات المجال (مثل الانتقال من حقول الذرة إلى البساتين) ضبطاً دقيقاً أو بحثاً إضافياً. يُنصح أيضاً بالاختبار عبر المواسم (صور صيفية مقابل صور خريفية).
أخيرًا، يجب اختبار كل نموذج جديد على منصة الطائرات بدون طيار قبل نشره. يتضمن ذلك تسجيل دقته وسرعته على الطائرات بدون طيار، والتأكد من أنه لا يؤدي إلى ارتفاع درجة حرارة الأجهزة، والتحقق من استهلاك الطاقة. عندها فقط يمكن للمزارعين الوثوق به للمراقبة الحيوية للمهام. من خلال الجمع بين التدريب ذي الصلة بالميدان والتقييم الصارم للأجهزة، ينتج عنه نماذج الكشف المدركة للنشر، والتي لا تتسم بالكفاءة نظريًا فحسب، بل أثبتت جدواها في الميدان.
فوائد أجهزة كشف الطائرات المسيرة المصممة يدويًا
يوفر NAS المدرك للنشر عدة مزايا واضحة مقارنة بالنماذج التقليدية المصممة يدويًا للطائرات بدون طيار:
1. مقايضات أداء أفضل: تميل النماذج التي تم العثور عليها بواسطة NAS إلى توفير مجموعات أعلى من الدقة والسرعة وكفاءة الطاقة. على سبيل المثال، تم تشغيل أفضل نموذج أسرع بـ 28% واستهلك طاقة أقل بـ 18.5% على Jetson Nano مقارنة بخط الأساس YOLOv8n المختار يدويًا، مع فقدان حوالي 2% فقط في اكتشاف mAP. سيكون تحقيق مثل هذا التوازن يدويًا صعبًا للغاية.
2. تعميم محسّن: يمكن للنماذج التي اكتشفتها NAS أن تكون أكثر تكيفًا مع الظروف الجديدة، نظرًا لأن البحث يمكن أن يتضمن بيانات أو أهدافًا متنوعة. لقد نجح الكاشف المصمم تلقائيًا في التعميم عبر أنواع مختلفة من المحاصيل (القمح والقطن) وظروف الإضاءة. هذه المتانة الواسعة ضرورية عندما تواجه الرحلات مشاهد غير متوقعة.
3. تقليل الجهد الهندسي: تقوم NAS بأتمتة الكثير من التجربة والخطأ. فبدلاً من تعديل أحجام الطبقات يدويًا واختبار العديد من المرشحين، تستكشف NAS المدركة للنشر تكرارًا الخيارات وتجد التصميم الأمثل لك. يوفر هذا وقت التطوير والخبرة، مما يسهل تحديث أجهزة الكشف لمهام جديدة أو أجهزة جديدة.
4. قابلية التوسع بمجرد إعداده، يمكن استخدام إطار عمل NAS لمنصات طائرات بدون طيار أو مهام مختلفة. على سبيل المثال، يمكن لـ NAS الذي يدرك النشر نفسه البحث عن كاشف مضبوط بدقة على دقة كاميرا مختلفة أو نموذج طائرة بدون طيار عن طريق تغيير مدخلات القيود ببساطة. هذا أكثر قابلية للتطوير بكثير من إعادة تصميم الشبكات من الصفر لكل سيناريو.
التحديات والقيود
التخصيص الشبكي المستوعب للتوزيع قوي ولكنه ليس حلاً سحريًا. يجب تطبيقه بعناية، مع الوعي بمتطلبات موارده وتقلب البيئة المستهدفة. على الرغم من وعده، يواجه التخصيص الشبكي المستوعب للتوزيع تحديات:
1. ارتفاع تكلفة البحث: قد تتطلب NAS حسابات كبيرة. حتى مع الخوارزميات الفعالة، قد يستغرق البحث في مساحة البنية التحتية ساعات وحدات معالجة الرسومات (أو حوسبة متخصصة). إذا لم تتم إدارتها بعناية، فقد تكون تكلفة البحث باهظة لبعض الفرق.
2. تحيز البيانات وتغير المجال: لا يكون نظام الشبكات العصبية الاصطناعية (NAS) جيدًا إلا بقدر جودة البيانات المستخدمة. إذا لم تكن صور التدريب ممثلة لظروف الحقل، فقد يكون للهندسة المعمارية التي تم العثور عليها أداءً ضعيفًا في الواقع. على سبيل المثال، قد لا ينتقل نموذج تم ضبطه على نوع محصول واحد أو منطقة جغرافية واحدة بشكل مثالي إلى آخر دون مزيد من التكيف.
3. عدم تجانس الأجهزة: تأتي مكونات الطائرات بدون طيار بأشكال عديدة (وحدات معالجة الرسومات المدمجة، وحدات المعالجة المركزية، و FPGAs المختلفة). قد لا يكون النموذج الأمثل للوحة واحدة هو الأمثل للوحة أخرى. يجب على NAS المدركة للتنفيذ إما إعادة تشغيل عمليات البحث لكل منصة أو استخدام قيود محافظة تناسب الجميع - مما قد يحد من الأداء.
4. المعوقات العملية: تتضمن عمليات النشر الفعلية للزراعة قضايا مثل تحديثات الشبكة عبر الهواء، والتكامل مع نظام التحكم في الطيران، وشهادات السلامة. حتى أفضل نماذج NAS يجب دمجها في نظام طائرات بدون طيار كامل. تنسيق تحديثات النماذج والموافقات التنظيمية وتدريب المزارعين هي عقبات غير تقنية.
التوجهات المستقبلية
من المرجح أن يشهد المستقبل تكاملًا أشد صرامة بين تصميم النماذج وتقنية المستشعرات والتحكم في الطائرات بدون طيار. ستبقى NAS المدركة للنشر أداة رئيسية في عملية التصميم المشترك هذه. بالنظر إلى المستقبل، تظهر عدة مسارات مثيرة:
1. شبكات التخزين المتاحة عبر الإنترنت والمتكيفة: بدلاً من البحث لمرة واحدة في وضع عدم الاتصال، قد تقوم الأنظمة المستقبلية بضبط الشبكة في الوقت الفعلي أو بين الرحلات. على سبيل المثال، يمكن لطائرة بدون طيار أن تبدأ بنموذج أساسي، وباستخدام خوارزميات NAS خفيفة الوزن، تقوم بتعديل نفسها للتعامل مع ظروف الإضاءة أو التضاريس الجديدة أثناء التنقل. تعد “NAS على الجهاز” هذه صعبة للغاية ولكنها يمكن أن تحسن القدرة على التكيف بشكل كبير.
2. التصميم المشترك للمستشعرات والنماذج: يمكن لأنظمة الزراعة الدقيقة المستقبلية تحسين اختيار الكاميرا (RGB، متعددة الأطياف، الأشعة تحت الحمراء) والشبكة العصبية بشكل مشترك. يمكن لـ NAS المدرك للتوزيع أن يمتد ليشمل معلمات المستشعر (مثل النطاقات الطيفية المستخدمة) في بحثه، وإيجاد أفضل مزيج من الأجهزة والنموذج.
3. التكامل متعدد الأطياف/فائق الأطياف: كما تشير دراسة أمراض القطن، فإن دمج الصور متعددة الأطياف يمكن أن يعزز الكشف، خاصة عن المشاكل في المراحل المبكرة. يمكن لـ NAS المستقبلية استكشاف نماذج متعددة التدفقات تدمج قنوات RGB والأشعة تحت الحمراء القريبة للكشف عن تغيرات النباتات الدقيقة بشكل أكثر موثوقية.
٤. مسارات اتخاذ القرار المستقلة: في نهاية المطاف، قد تغذي أجهزة الكشف المحسّنة لـ NAS الاستقلالية الكاملة. على سبيل المثال، قد تقوم طائرة بدون طيار بإنشاء خطة رش تلقائيًا أو تنبيه مديري المزارع إذا اكتشفت ظروفًا معينة. يمكن توسيع نطاق NAS المدرك للنشر ليشمل خطوط الأنابيب من البداية إلى النهاية (نماذج الكشف + العمل)، مما يؤدي إلى تحسين النظام بأكمله.
٥. الاعتبارات الأخلاقية والبيئية: مع ازدياد قدرات الطائرات المسيرة، يجب أن نأخذ في الاعتبار الخصوصية والسلامة الجوية والتأثيرات على عمال المزارع (كما أشار أغراوال وعارفات). يعد ضمان استخدام الطائرات المسيرة المحسّنة للنظام الوطني للملاحة الجوية بمسؤولية في الزراعة هدفًا مستقبليًا مهمًا.
الخاتمة
يمثل NAS المدرك للنشر نهجًا قويًا لتكييف كاشفات الكائنات خفيفة الوزن لمراقبة المحاصيل المعتمدة على الطائرات بدون طيار. من خلال تضمين أجهزة الطائرات بدون طيار وقيود المهمة في البحث، فإنه ينتج نماذج توفر الحوسبة والطاقة دون التضحية بالكثير من الدقة. على سبيل المثال، أظهر عمل حديث كاشفًا مصممًا بواسطة NAS يستخدم 37%فلوبس أقل و 61% معلمات أقل من YOLOv8n المرجعي، ومع ذلك انخفض متوسط الدقة لديه بمقدار ~2% فقط.
على أجهزة الطائرات المسيرة الفعلية، يعني هذا سرعة استدلال أكبر% وكفاءة طاقة أفضل%. تترجم هذه المكاسب إلى أوقات طيران أطول وتحليل أسرع ودعم زراعي أكثر استجابة. بالمقارنة مع النماذج المصممة يدويًا، توفر NAS المدركة للنشر تعميمًا أفضل للأداء، وجهدًا أقل للضبط اليدوي، وقابلية للتوسع لمنصات الطائرات بدون طيار الجديدة.
في سياق الزراعة الدقيقة، يمكن لهذه التحسينات أن تجعل مراقبة المحاصيل باستخدام الطائرات بدون طيار أكثر عملية وفعالية. يمكن للطائرات المسيرة المجهزة بكاشفات محسّنة لـ NAS تحديد الأعشاب الضارة أو الآفات أو الإجهاد بشكل أكثر موثوقية، مما يتيح التدخلات في الوقت المناسب التي توفر الموارد وتزيد الغلة. مع استمرار الزراعة في تبني الطائرات المسيرة والذكاء الاصطناعي، سيلعب NAS المدرك للاستخدام دورًا مركزيًا في ضمان أن النماذج التي تعمل على تلك الطائرات المسيرة فعالة ودقيقة وجاهزة للحقل. إنه يسد الفجوة بين أبحاث الشبكات العصبية المتطورة والاحتياجات العملية للمزارعين، مما يساعد على دفع مستقبل الزراعة الدقيقة المعتمدة على البيانات.
مراقبة المحاصيل