Прецизна пољопривреда је модеран приступ заснован на подацима који користи напредне технологије за прилагођавање пољопривреде специфичним условима на терену. На пример, пољопривредници користе GPS, IoT сензоре, дронове и аналитику за праћење влажности земљишта, времена и здравља усева у реалном времену. Затим примењују тачну количину воде, ђубрива или пестицида која им је потребна, на правом месту и у право време. Овај паметни приступ побољшава ефикасност и принос, а истовремено смањује отпад; један извештај наводи да су прецизне методе постигле повећање производње усева за отприлике 4% и смањење употребе хербицида за 9%. У том контексту, Моделска предиктивна контрола (MPC) се појавила као моћна стратегија контроле за пољопривреду.
MPC користи математички модел пољопривредног система за предвиђање будућег понашања и израчунавање оптималних контролних акција током покретног временског хоризонта. У сваком кораку решава проблем оптимизације како би се минимизирали трошкови (на пример, одступање од циљане влажности земљишта или потрошње енергије) подложни ограничењима воде, ограничењима опреме итд. Пошто MPC гледа унапред и прилагођава се променљивим условима, идеалан је за управљање сложеним, ограниченим процесима у пољопривреди. Контролни системи попут MPC-а су кључни у модерној пољопривреди, где произвођачи морају да жонглирају многим варијаблама (варијабилност земљишта, временске промене, фазе раста усева) и да раде под строгим ограничењима ресурса и животне средине.
Предвиђањем будућих потреба (као што су надолазећи топлотни талас или прогноза кише) и аутоматским подешавањем актуатора (вентила, прскалица, грејача), MPC омогућава адаптивније доношење одлука него ручно или једноставно управљање повратним информацијама. Овај предиктивни, на оптимизацији заснован приступ помаже пољопривредницима да уштеде воду и енергију и побољшају приносе – кључне циљеве док се свет суочава са све строжим ограничењима ресурса и климатском нестабилношћу.
Основе предиктивног управљања моделом
Моделно предиктивно управљање (MPC) функционише тако што више пута предвиђа будућа стања система и оптимизује контролне улазе током коначног хоризонта. Појавило се током 1960-их и 1970-их, усвојено је у процесним индустријама 1980-их и од тада је напредовало кроз класичне, унапређене, модерне и фазе вођене подацима – вођене напретком у рачунарској снази, побољшаним руковањем ограничењима и растућом интеграцијом са машинским учењем и науком о подацима. Кључни елементи укључују:
- Модел процеса: MPC се ослања на математички модел (физички или заснован на подацима) пољопривредног процеса (раст усева, биланс воде у земљишту, климатска динамика итд.). Овај модел предвиђа како ће се систем развијати на основу датих улазних података.
- Хоризонт предвиђања: У сваком кораку управљања, модел пројектује фиксни временски прозор (хоризонт предвиђања) унапред користећи тренутна мерења (нпр. очитавања сензора) и кандидатске контролне акције.
- Функција трошкова (циљ): MPC дефинише трошак или циљ који треба минимизирати, као што су одступања од жељене влажности или температуре земљишта, плус казне за коришћење ресурса.
- Оптимизација: Контролер решава проблем ограничене оптимизације током времена како би пронашао низ акција (брзине наводњавања, подешавања грејача итд.) које минимизирају трошкове уз задовољавање ограничења.
- Руковање ограничењима: MPC природно укључује ограничења улазних података и стања – на пример, капацитет пумпе, ограничења вентила, брзине актуатора и ограничења животне средине у погледу потрошње воде или нивоа хранљивих материја. Оптимизатор осигурава да акције поштују ова ограничења.

Након решавања, MPC примењује прву контролну акцију у оптимизованој секвенци, затим чека следећи временски корак, поново мери систем и решава нову оптимизацију (ово је шема “опадајућег хоризонта” или “покретне оптимизације”). Ова повратна информација даје MPC-у робусност на поремећаје и грешке модела, јер редовно ажурира предвиђања новим подацима. За разлику од традиционалних метода управљања:
1. ПИД контролери прилагођавају улазе само на основу тренутних и прошлих грешака (пропорционално-интегрално-деривативно), без експлицитног предвиђања будућих промена или руковања ограничењима. Добро функционишу за системе са једном променљивом, али се муче са оптимизацијом са више променљивих или строгим ограничењима.
2. Системи засновани на правилима прате унапред подешене хеуристике (нпр. укључују прскалицу ако је влажност < X). Недостаје им формална оптимизација и не могу лако да уравнотеже конкурентске циљеве или да се прилагоде новим условима.
Поређења ради, предиктивна оптимизација MPC-а га чини супериорним за сложене пољопривредне задатке. Може истовремено да обрађује више променљивих (температуру, влажност, CO₂, воду), испуњава строга ограничења и прилагођава се прогнозама (нпр. временске прогнозе се могу унети у модел). Главни компромис је рачунарски: решавање оптимизације онлајн у сваком кораку захтева већу рачунарску снагу. Међутим, модерни процесори и специјализовани решавачи (нпр. OSQP, ACADO) учинили су MPC у реалном времену изводљивим чак и за пољопривредне примене.
Типичан MPC систем има три компоненте: математички модел (може бити заснован на физици или научен из података), сензоре и изворе података (који пружају мерења земљишта, времена, стања усева у реалном времену) и MPC контролер/оптимизатор (који ради на рачунару или уграђеном уређају). Модел може симулирати раст усева (за оптимизацију приноса), динамику воде у земљишту (за наводњавање) или климу у пластенику. Сензори могу укључивати сонде за влажност земљишта, сензоре влажности лишћа, мониторе температуре/влажности или снимке даљинске детекције. MPC контролер затим очитава податке, предвиђа будућа стања и израчунава контролне команде (отварање вентила, управљање тракторима, подешавање лампи).
Преглед система прецизне пољопривреде
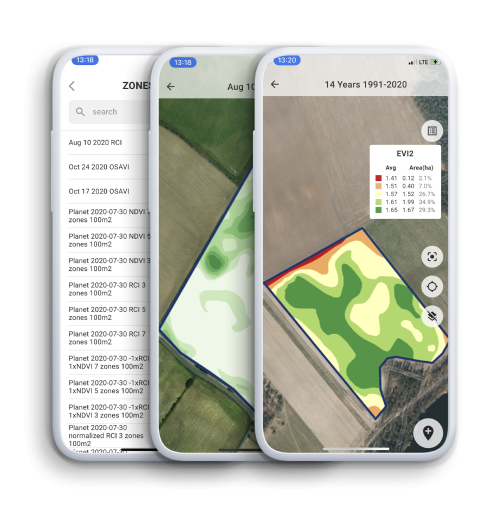
Прецизна пољопривреда има за циљ повећање продуктивности, ефикасности и одрживости коришћењем детаљних података о пољима и усевима. Уместо јединствених пракси, пољопривредници сада прилагођавају акције локалним условима. На пример, састав земљишта и влажност могу се значајно разликовати чак и на једном пољу; прецизна технологија омогућава пољопривреднику да зна којим подручјима је потребно више ђубрива, а којима мање. Уобичајене кључне технологије укључују:
- IoT сензори и бежичне мреже: Сонде за влажност земљишта, сензори температуре, сонде за EC (салинитет земљишта) и други уређаји Интернета ствари континуирано мере услове на пољу. Ови сензори шаљу податке системима за управљање фармама.
- ГПС и ГИС системи: ГПС омогућава прецизно мапирање поља. Пољопривредници користе ГИС (географске информационе системе) за креирање мапа земљишта и мапа приноса. Ове мапе воде примену променљивих доза (VRI) семена, воде или ђубрива.
- Дронови и сателитски снимци: Аерофотоснимци (NDVI, термални, RGB) пружају скенирање здравља и стреса усева на нивоу поља. Дронови такође могу носити сензоре (мултиспектралне камере, LiDAR) за праћење виталности биљака.
- Софтвер за управљање фармама: Платформе засноване на облаку прикупљају и анализирају све ове податке, помажући пољопривредницима да визуелизују варијабилност и доносе одлуке (нпр. где наводњавати или прскати).
Ове технологије трансформишу доношење одлука. Један извор из индустрије објашњава да праћењем података о земљишту и усевима у реалном времену, произвођачи могу доносити паметније одлуке и примењивати инпуте само тамо где је потребно. У пракси, прецизна пољопривреда је показала велике користи: на пример, коришћење променљиве брзине наводњавања и сензора влаге на америчким фармама могло би уштедети додатних 21% воде. Генерално, модерне прецизне фарме могу постићи веће приносе, бржи раст и ниже трошкове инпута доношењем одлука заснованих на подацима.
На пример, аутоматизација наводњавања и ђубрења на основу података сензора значи мање отпада и ефикасније коришћење ресурса. Приметно је да прецизне праксе такође смањују утицај на животну средину: недавна анализа је показала да прецизне технике смањују употребу хербицида за 9% и потрошњу воде за 4% у просеку. Оптимизацијом улаза, прецизна пољопривреда минимизира отицање и емисије, помажући фармама да постану одрживије.
Интеграција и кључне примене MPC-а у прецизној пољопривреди
Моделска предиктивна контрола се природно уклапа у паметни пољопривредни систем као “мозак” који претвара податке у акције. У типичном току, IoT сензори и екстерни подаци (као што су временске прогнозе) уносе се у дигитални модел пољопривредног процеса (раст усева, биланс воде у земљишту, клима у стакленику итд.). MPC контролер затим користи овај модел за предвиђање будућих стања и израчунавање оптималних контрола. Петља је: детекција → моделирање/предвиђање → оптимизација → активирање.
На пример, сензори влажности земљишта и временске прогнозе се уносе у модел земљишта и воде. MPC оптимизатор користи ово за планирање наводњавања током следећег дана или недеље, на основу прогноза кише и температуре. Затим шаље команде вентилима или пумпама за наводњавање. У сваком интервалу, мерења ажурирају модел и оптимизација се понавља. Ово омогућава адаптивну контролу у реалном времену која континуирано узима у обзир нове информације.
МПЦ се може покретати онлајн (у реалном времену) на пољопривредним рачунарима или контролерима. За спорије процесе (као што су сезонски планови наводњавања), може се вршити офлајн планирање, а затим имплементирати распоред. Разлика је у томе што МПЦ у реалном времену користи тренутне податке у сваком кораку, док офлајн МПЦ користи фиксни план који се ажурира дневно или недељно. Најсавременији концепт је дигитални близанац фарме или пластеника – виртуелна реплика пољопривредног система.
Дигитални близанац интегрише моделе земљишта, усева, климе и опреме. Пољопривредници могу тестирати стратегије контроле на близанцу (симулацијама) пре него што их примене на стварној фарми. Прецизно рачунарство (MPC) користи близанац за предвиђање и оптимизацију на начин без ризика. У будућности, напредак у рачунарству у облаку и 5G мрежи може омогућити моћне симулације дигиталних близанаца у ходу, док рачунарство на рубу (локални контролери) извршава брзо MPC за роботе или машине на лицу места. Неке од кључних примена MPC-а у прецизној пољопривреди су:
1. Управљање наводњавањем: MPC се широко користи за ефикасну контролу наводњавања. Коришћењем модела влажности земљишта и временске прогнозе, MPC предвиђа потребе усева за водом и заказује заливање. Обезбеђује да се достигне циљана влажност земљишта, уз минимизирање потрошње воде и поштовање ограничења пумпе или снабдевања водом. На пример, MPC контролер може смањити наводњавање пре прогнозиране кише или прилагодити заливање током топлотног таласа.
У пракси, предиктивна контрола наводњавања може драматично смањити потрошњу воде – један извештај наводи да наводњавање вођено вештачком интелигенцијом смањује потрошњу воде и до 35%, док повећава приносе за 15–30%. MPC такође може да примени стратегије дефицитарног наводњавања (намерно благи стрес од воде) како би се побољшао квалитет усева (нпр. у виноградима). Балансирањем приноса и уштеде воде, вишециљни MPC проналази оптималне компромисе у условима ограничења на терену.

2. Контрола климе у пластеницима: Пољопривреда у контролисаном окружењу има велике користи од MPC-а. Стакленици имају много међусобно повезаних варијабли: температуру, влажност, CO₂, светлост итд. MPC може истовремено да управља свим актуаторима (грејачима, отворима за вентилацију, вентилаторима, светлима, CO₂ инјекторима) како би ефикасно одржавао идеалне услове за раст.
На пример, једна студија о интегрисаном стакленику на крову показала је да је нелинеарна MPC стратегија смањила потрошњу енергије (грејање/хлађење) у просеку за 15,2% у поређењу са традиционалном контролом. Предвиђањем спољних временских промена и потреба биљака, MPC одржава климатску стабилност и ниске трошкове енергије. Може да одлучи, рецимо, колико да отвори вентилационе отворе или покрене грејач пре предвиђеног хладног таласа. Генерално, MPC доноси значајне уштеде енергије и CO₂, уз обезбеђивање максималне удобности биљака.
3. Управљање ђубривима и хранљивим материјама: МПЦ може прецизно да дозира ђубрива и хранљиве материје (у земљишту или хидропоници) на основу модела раста. Користећи податке сензора о нивоима хранљивих материја и фазама раста усева, МПЦ планира снабдевање хранљивим материјама како би задовољио потребе биљака без вишка. Ово прецизно дозирање смањује отицање и расипање ђубрива. Контролери такође могу да управљају pH вредношћу и електричном проводљивошћу у хидропонским решењима. На пример, МПЦ шема може да обезбеди циљану концентрацију хранљивих материја уз минимизирање укупне потрошње, директно оптимизујући “праву брзину, право време, право место” 4Р принципа. Прецизна контрола хранљивих материја има двоструку корист од повећања приноса и смањења хемијског загађења. У ствари, студија АЕМ је приметила да прецизне праксе побољшавају ефикасност примене ђубрива за око 7%.
4. Оптимизација раста усева: Поред појединачних процеса, MPC може да ради на моделима раста усева како би оптимизовао принос и квалитет. Динамички модели (нпр. DSSAT, AquaCrop) описују како усев расте под датим наводњавањем, хранљивим материјама и климом. MPC може да интегрише ове моделе како би одредио оптималне распореде заливања, ђубрења и евентуално интервенција против штеточина током сезоне.
На пример, може одложити наводњавање како би се изазвао жељени стрес за квалитет или применити додатно ђубриво током критичних периода раста. MPC контролер тако постаје оптимизатор раста који мења пољопривредне инпуте у реалном времену како би се максимизирао принос. Истраживачки прегледи истичу раст усева и оптимизацију приноса као кључну примену MPC-а.
. MPC се такође користи за управљање стресом – на пример, за регулисање влажности крошње како би се ограничиле гљивичне болести уз одржавање раста.
5. Аутономна пољопривредна опрема: Модерни трактори, прскалице и роботи користе MPC за планирање и контролу путање. На пример, аутономни дрон или трактор за прскање може користити MPC за планирање своје путање и спровођење прецизних операција на пољу. Горња слика приказује дрон који лети изнад поља – његова путања лета и брзина прскања могу бити оптимизоване помоћу MPC-а на основу GPS мапирања и сензора препрека. MPC може да се носи са динамиком возила, поремећајима ветра и ограничењима батерије како би робот остао на курсу.
У пракси, планери засновани на MPC-у омогућавају опреми да покрива поља са минималним преклапањем, избегава препреке и подешава брзину у реалном времену. То резултира ефикасним радом у погледу ресурса (нпр. мање горива, равномерније прскање) и безбеднијом навигацијом. Заиста, MPC је познат по робусном руковању ограничењима и оптимизацији у реалном времену у роботици. Модерни трактори без возача и роботски комбајни често укључују MPC или сличне контролере засноване на моделима за навигацију и извршавање задатака.
Предности предиктивне контроле модела у прецизној пољопривреди
Ефикасност ресурса: MPC-ова предиктивна оптимизација доводи до значајних уштеда. Студије показују да штеди воду и енергију тако што заказује наводњавање и контролу климе само када је потребно, често штедећи 20–35% воде у поређењу са наивним заказивањем. Такође омогућава прецизнију употребу ђубрива и пестицида, смањујући употребу хемикалија (AEM извештава о 9% мањој употреби пестицида уз прецизне праксе). Укратко, MPC помаже пољопривредницима да “користе мање да би узгајали више” тако што користи праву количину улагања под различитим условима.
Већи принос и квалитет: Предвиђањем стреса и проактивним прилагођавањем улаза, MPC може побољшати приносе и квалитет усева. Одржавање оптималних услова (влажност земљишта, температура, хранљиве материје) током целе сезоне директно подстиче раст биљака. На пример, у многим испитивањима, контрола климе заснована на MPC-у у пластеницима повећала је приносе поврћа уз уштеду енергије. Преглед MPC-а истиче побољшани квалитет производа и економске добитке као кључне предности.
Смањен утицај на животну средину: Ефикасније коришћење воде, ђубрива и хемикалија значи мањи еколошки отисак. Прецизне методе у целини довеле су до тога да су милиони хектара земље ефикасно “спашени” добијањем више из постојећих поља. Допринос MPC-а овоме је јасан: смањењем непотребног отицања воде и вишка ђубрива, смањује се испирање нитрата и хемијско загађење. Анализа AEM-а напомиње да би шира примена прецизне технологије (укључујући контроле сличне MPC-у) већ могла да избегне емисије еквивалента CO₂, захваљујући уштеди земљишта и горива.
Руковање ограничењима и неизвесношћу: За разлику од фиксних контролера, MPC може изворно да поштује ограничења (капацитет пумпе, ограничења вентила, прописе о заштити животне средине) и може да оптимизује чак и уз ограничења ресурса. Такође може да укључи неизвесност прогнозе (нпр. путем стохастичког MPC-а) како би остао отпоран на грешке у временској прогнози. Ова способност предвиђања и прилагођавања неизвесности је главна предност.
Аутоматизација и скалабилност: MPC омогућава већу аутоматизацију. Скида рутинско доношење одлука са рамена пољопривредника, што штеди рад и омогућава проширење. Једном подешен, MPC систем континуирано подешава контроле уз минималну интервенцију. Ова скалабилност значи да се MPC може применити на било чему, од малог пластеника до велике фарме (уз улагање) и проширити са више сензора и актуатора током времена.
Изазови и ограничења МПЦ-а
Рачунарски захтеви: MPC захтева решавање проблема оптимизације у сваком кораку управљања. За велике фарме или брзе процесе, ово може бити рачунски захтевно. MPC у реалном времену захтева брзе процесоре или поједностављене моделе. Напредак у решавачима и хардверу (укључујући уређаје на рубу мреже) смањује ово оптерећење, али оно остаје изазов, посебно за мање, јефтиније системе. Преглед MPC-а из 2024. године посебно истиче рачунску сложеност као кључни изазов.
Тачност модела: Перформансе MPC-а зависе од тачности основног модела. Развијање поузданог модела за биолошке системе (усеви, земљиште, стакленик) је тешко. Несигурност модела (неусклађеност између модела и стварности) може деградирати контролу. Истраживачи се тиме баве путем адаптивног MPC-а (ажурирање модела онлајн) или модела заснованих на подацима (модели машинског учења). Ипак, добијање доброг модела често захтева значајно стручно знање у области и податке.
Квалитет и доступност података: MPC-у су потребни висококвалитетни подаци сензора и евентуално временске прогнозе. У пољопривреди, сензори могу бити оскудни или бучни, бежична покривеност може бити слаба, а прогнозе несавршене. Недостајући или нетачни подаци могу довести до неоптималних или небезбедних контролних акција. Ефикасно примењивање MPC-а мора да укључује робусну процену стања или детекцију грешака (нпр. Калман филтери) за обраду грешака сензора.
Трошкови и сложеност: Имплементација MPC-а подразумева трошкове (сензори, рачунари, софтвер) и захтева техничко знање. Мале фарме могу сматрати да су почетна улагања висока. Такође постоји сложеност у конфигурисању MPC-а (подешавање хоризонта, тежина итд.). Усвајање може бити отежано недостатком познавања: пољопривредници могу преферирати једноставније системе, осим ако користи јасно не надмашују трошкове. Текући рад на пољопривредном саветодавству и платформама једноставним за коришћење има за циљ смањење ових препрека.
Усвајање пољопривредника: Коначно, усвајање напредне контроле попут МПЦ-а зависи од поверења и разумевања пољопривредника у њу. Пројекти обуке и демонстрације су кључни. Неки пољопривредници могу бити скептични према оптимизацији “црне кутије”. Транспарентност (нпр. МПЦ интерфејси који објашњавају одлуке) и теренска испитивања која показују повраћај улагања могу помоћи у изградњи поверења.
Студије случаја и имплементације у стварном свету
Неколико пилот пројеката и истраживачких студија демонстрирају потенцијал MPC-а у пољопривреди. У пластеничкој индустрији, нелинеарни MPC контролер је тестиран на кровној стакленику у Њујорку. Успешно је регулисао температуру, влажност и CO₂, оптимизујући потрошњу енергије, постижући просечну уштеду енергије од око 15,2% у односу на стандардне стратегије управљања. Ово показује потенцијал MPC-а за урбане и високотехнолошке пластенике.

У наводњавању, иако су специфична теренска испитивања МПЦ-а још увек у појави, сродне технологије су показале добитке. На пример, интелигентни контролери за наводњавање (често засновани на вештачкој интелигенцији) су комерцијално примењени, са извештајима о уштеди воде од 30–35% и значајном повећању приноса. Неке истраживачке фарме интегришу МПЦ са сензорима влаге и метеоролошким станицама; ова испитивања показују бољу ефикасност коришћења воде у поређењу са системима заснованим на тајмеру.
Паметни трактори и роботика који користе MPC су такође у развоју. На пример, аутономне прскалице опремљене предиктивним планерима путање (MPC апликација) тестирају се на великим фармама. Рани извештаји произвођача указују на прецизну покривеност и смањено преклапање, што се претвара у мању употребу горива и хемикалија. Лекције из ових примена истичу важност поуздане комуникације, робусних сензорских мрежа и корисничких контролних табли, али генерално потврђују да MPC може добро да функционише и ван лабораторије.
Научене лекције: Теренске имплементације наглашавају да прецизни модели земљишта и климе чине велику разлику. У пластеницима, на пример, калибрација термалног модела према специфичној структури стакленика била је кључна за постизање пуне уштеде енергије. У наводњавању, осигуравање да сензори остану добро одржавани (како би се избегло померање) је од виталног значаја како би MPC имао добре податке. Такође, постепена интеграција MPC-а – почевши од заказивања на вишем нивоу, а не од критичних петљи у реалном времену – помаже пољопривредницима да изграде самопоуздање.
Нови трендови и поређење са другим техникама контроле
Будући развој обећава побољшање улоге MPC-а у пољопривреди. Један тренд је MPC побољшан вештачком интелигенцијом: машинско учење може побољшати моделе или их чак заменити (научена динамика) како би се забележило сложено понашање биљака. Хибридни приступи комбинују физичке моделе са неуронским мрежама ради веће тачности. Истраживачи истражују учење са појачањем (RL) у комбинацији са MPC-ом (RL-MPC) за неке задатке.
Интеграција великих података и облака: Како фарме прикупљају све више података (мапе земљишта, вишегодишњи приноси), МПЦ контролери могу искористити дугорочне трендове. Платформе засноване на облаку могу покретати захтевну оптимизацију (дугорочни хоризонти), док уређаји на рубу мреже брже раде локални МПЦ. Дигитални близанци ће постати моћнији, омогућавајући пољопривредницима да симулирају МПЦ стратегије у будућим климатским сценаријима.
Напредак рубног рачунарства и интернета ствари: Нови микроконтролери и IoT чипови сада могу да покрећу умерене MPC решаваче на батерије. То значи да чак и мали аутоматизовани вентили за наводњавање или трактори могу имати уграђене предиктивне контролере. Брже мреже (5G) и сателитски IoT (као што су Starlink или специјализоване мреже ниске снаге широког подручја) чине проток података у реалном времену поузданијим.
Отпорност на климатске промене: Са климатским променама, MPC може играти улогу у отпорности. На пример, контролери могу укључити циљеве угљеничног или водног отиска или интегрисати прогнозе временских екстрема како би заштитили усеве. Аутономне фарме - где је од садње до жетве потпуно аутоматизовано - су на помолу; MPC (или генерално контрола заснована на оптимизацији) биће централна за такве системе, координирајући роботске флоте и токове ресурса.
У поређењу са ПИД контролом, МПЦ нуди експлицитно предвиђање и оптимизацију. ПИД петља реагује на тренутну грешку (нпр. превише суво земљиште покреће наводњавање). МПЦ, насупрот томе, предвиђа где ће влага бити дата, ветар, евапотранспирација и планира заливање унапред. ПИД може да прекорачи или да се поремети под ограничењима, док МПЦ поштује ограничења по дизајну. МПЦ такође изворно обрађује више улаза/излаза (МИМО), док је ПИД инхерентно једнопетљни (један сензор, један актуатор).
У поређењу са системима заснованим на правилима, MPC је флексибилнији. Систем правила би могао да каже “ако је влага < праг и нема прогнозе кише, наводњавајте 10 јединица”. MPC ће уместо тога оптимизовати тачан распоред наводњавања који најбоље уравнотежује будуће кише, потребе биљака и трошкове воде. MPC генерално даје боље перформансе у сложеним, променљивим окружењима. Компромис је у томе што су правила једноставнија за имплементацију; MPC захтева модел и решавач. Међутим, код усева великих размера или високе вредности, предности MPC-а постају значајне.
Алати, софтвер и платформе за предиктивно управљање моделом
Практичари могу да креирају и тестирају MPC користећи различите алате. Уобичајена симулациона окружења укључују MATLAB/Simulink (са MPC Toolbox-ом) и Python библиотеке попут GEKKO, do-mpc или CasADi за оптималну контролу. Оне омогућавају програмерима да креирају и подешавају MPC моделе у софтверу. За имплементацију, специјализовани контролери или PLC-ови могу да покрећу MPC алгоритме брзином на терену.
Што се тиче пољопривредне технологије, неке IoT платформе и API-ји подржавају MPC. На пример, паметни системи за наводњавање могу омогућити корисницима да отпремају прилагођене алгоритме управљања. Компаније попут John Deere-а, Trimble-а и мали стартапови нуде системе за управљање фармама са предиктивним функцијама (мада често власничким). Отворени кодови (нпр. FarmOS, OpenAg) омогућавају „уради сам“ интеграцију MPC-а за хобисте и истраживаче.
Комерцијалне дигиталне близанце и IoT платформе (Azure FarmBeats, AWS IoT или Google-ов Sunrise) могу да хостују MPC језгро у облаку, док уређаји на рубу мреже обављају сензоре. Неки нови чипови за вештачку интелигенцију на рубу мреже и паметни сензори чак укључују и могућности оптимизације на возилима. Пољопривредници могу да бирају комплетна решења по принципу „кључ у руке“ (нпр. контролери климе у пластеницима са уграђеним MPC-ом) или да их комбинују: користе MATLAB или Python за почетни дизајн, а затим имплементирају на уређајима који користе нпр. FPGA или микроконтролере. Још увек не доминира ниједан стандард; област се развија. Многи стручњаци почињу са отвореним алатима (MATLAB или Python) за симулацију, а затим их портују на робуснији хардвер за рад на терену.
Закључак
Моделска предиктивна контрола (MPC) спремна је да игра кључну улогу у будућности прецизне пољопривреде. Коришћењем модела и прогноза за оптимизацију пољопривредних активности, MPC помаже фармама да ефикасније користе воду, енергију и хемикалије, истовремено повећавајући приносе и квалитет производа. Његова способност да се носи са вишеструким улазима, ограничењима и неизвесностима чини га погодним за сложене пољопривредне системе. Како пољопривреда постаје све више технолошки вођена, MPC пружа “мозак” за паметно доношење одлука. У пракси, системи вођени MPC-ом су већ показали импресивне предности – уштеду енергије у пластеницима, уштеду воде на пољима и ниже трошкове улагања.
Користи иду руку под руку са ширим циљевима одрживости. Аналитичари напомињу да нам прецизне методе попут MPC-а омогућавају да “користимо мање да бисмо узгајали више”, смањујући еколошки отисак пољопривреде. Иако изазови остају (трошкови, моделирање, подаци), континуирани напредак у вештачкој интелигенцији, сензорима и рачунарству чини MPC приступачнијим. Укратко, MPC је технологија која омогућава одрживу, високотехнолошку пољопривреду, помажући пољопривреди да задовољи растућу потражњу за храном под строжим ограничењима. Уз континуиране иновације и усвајање, потпуно аутономне фарме – вођене предиктивним контролерима – могле би бити следећи корак у прецизној пољопривреди.
Често постављана питања (FAQs)
1. Шта је МПЦ једноставним речима?
МПЦ је као паметни аутопилот за пољопривреду. Користи модел фарме и прогнозе (као што су временске) да би унапред планирао акције (наводњавање, храњење итд.). Уместо да реагује само на тренутне услове, он “гледа унапред” током наредних сати или дана и проналази најбољи план за постизање ваших циљева (нпр. здрави усеви) уз коришћење минималних ресурса.
2. Да ли је МПЦ скуп за пољопривреднике?
МПЦ захтева технологију (сензоре, рачунаре, софтвер), тако да постоје почетни трошкови. Међутим, трошкови израчунавања су опале, а јефтинији IoT сензори су широко доступни. Многи модерни трактори и опрема већ долазе опремљени сензорима. Такође, cloud и алати отвореног кода чине МПЦ приступачнијим. Кључно је да повећање ефикасности (мање воде, ђубрива, губитка енергије) и већи приноси могу временом да исплате инвестицију.
3. Да ли МПЦ може да ради на малим фармама?
Да. MPC алгоритми се могу скалирати на систем било које величине. Мали стакленик или башта могу користити једноставну MPC конфигурацију (чак и лаптоп или Raspberry Pi). Многе апликације за даљинско очитавање омогућавају малим пољопривредницима да испробају одлуке засноване на моделима путем паметног телефона. Кључ је у усклађивању сложености система са величином фарме. Малим фармама можда неће бити потребни веома дуги хоризонти или огромни модели. Чак и основни MPC са једним или два сензора може помоћи малој фарми да постане ефикаснија.
4. Колико су тачни MPC модели и предвиђања?
Тачност зависи од квалитета података и дизајна модела. Једноставни линеарни модели могу бити релативно тачни за неке системе. Сложенији модели (као што су неуронске мреже) могу да ухвате компликовано понашање биљака или земљишта. У пракси, MPC је дизајниран да буде робустан: редовно поново калибрише планове на основу нових мерења, тако да чак и ако предвиђања нису савршена, исправља се током времена. Грешке модела и поремећаји се обрађују повратним информацијама. Са добрим сензорима и подешавањем, модерни MPC може постићи високу тачност у задацима управљања.