Les véhicules aériens sans pilote (UAV), ou drones, transforment l'agriculture moderne en offrant une vue aérienne rapide des champs. Ils servent à analyser les cultures pour évaluer leur état sanitaire, leur stade de croissance, la présence de ravageurs et de mauvaises herbes, et à estimer les rendements. Par exemple, la Chine compte aujourd'hui plus de 250 000 drones agricoles en service, et en Thaïlande, environ 301 000 tonnes de terres agricoles étaient couvertes par des drones pour la pulvérisation ou la surveillance d'ici 2023. Ces drones rendent l'agriculture plus efficace en détectant rapidement les problèmes (comme les infestations de ravageurs ou le stress hydrique) qui peuvent passer inaperçus au sol.
Cependant, les petits drones disposent d'une puissance de calcul embarquée et d'une autonomie très limitées. L'exécution en temps réel d'algorithmes de vision complexes basés sur l'IA représente donc un défi. Les modèles de détection d'objets légers traditionnels (comme les détecteurs YOLO ou MobileNet de petite taille) ne répondent que partiellement à ces besoins : ils sacrifient souvent la précision ou la vitesse et nécessitent un paramétrage manuel important. Ce manque justifie le développement de la recherche d'architecture neuronale adaptée au déploiement (NAS) : une méthode de conception automatisée qui adapte les modèles d'apprentissage profond aux exigences précises des drones déployés sur le terrain.
L'agriculture de précision moderne utilise des drones pour inspecter les champs et surveiller l'état des cultures. En survolant de vastes zones, les drones collectent des images haute résolution des plantes, du sol et de la configuration des parcelles. Ces images sont ensuite traitées par des algorithmes de vision par ordinateur qui détectent les adventices, estiment le rendement (par exemple en comptant les fruits ou les épis) ou repèrent les premiers signes de maladies ou de carences nutritionnelles. Par exemple, les drones permettent de cibler la pulvérisation d'herbicides sur les zones infestées, réduisant ainsi l'utilisation de produits chimiques et les coûts.
Cependant, les petits ordinateurs de bord des drones (souvent limités à quelques watts) peinent à faire fonctionner de grands réseaux neuronaux à vitesse de vol. Il est donc difficile de réaliser une analyse en temps réel : si un drone détecte un problème, il doit réagir rapidement ou enregistrer les données avant que sa batterie ne soit déchargée. Les détecteurs légers actuels (par exemple, YOLOv8 nano, YOLO-tiny, MobileNets) sont conçus manuellement et impliquent souvent des compromis : réduire la taille d'un modèle accélère son exécution, mais peut nuire à sa précision.
De ce fait, il est essentiel de disposer de méthodes capables de trouver automatiquement le modèle le plus adapté aux contraintes du drone. Le NAS (réseau de neurones adaptatif) répond à ce besoin en recherchant des architectures de réseaux neuronaux qui optimisent conjointement la précision de détection et l'utilisation des ressources (latence, consommation d'énergie, mémoire) dans des conditions réelles d'utilisation du drone. Cette approche permet de fournir des modèles spécialisés, performants sur le matériel du drone, tout en conservant une grande précision pour la surveillance des cultures.
Exigences en matière de détection d'objets par drone pour la surveillance des cultures
Les drones agricoles effectuent diverses tâches de détection visuelle, chacune ayant ses propres exigences :
1. Détection de la santé et du stress des cultures : Les drones utilisent des caméras RVB, thermiques ou multispectrales pour identifier les plantes stressées, les carences nutritionnelles ou les symptômes de maladies. Des algorithmes en temps réel permettent de cartographier la variabilité des parcelles et d'optimiser l'irrigation ou la fertilisation. La détection précise des signes de stress chez les plantes permet d'intervenir rapidement et ainsi de préserver les rendements.
2. Identification des mauvaises herbes : La détection des mauvaises herbes parmi les cultures permet aux agriculteurs de ne pulvériser que les plantes indésirables, économisant ainsi les herbicides. Par exemple, une étude menée sur des champs de coton a utilisé des images de drones avec un détecteur basé sur YOLOv7 et a atteint une précision d'environ 83% pour la distinction entre les mauvaises herbes et le coton. Cependant, la distinction entre les mauvaises herbes et les cultures visuellement similaires reste difficile sur des images de champs encombrés.

3. Détection des ravageurs et des maladies : Les drones peuvent repérer les infestations (criquets, insectes ou maladies fongiques, par exemple) plus tôt que les équipes humaines à pied. Ils permettent également de cartographier les zones infestées grâce à l'imagerie multispectrale, plus performante que l'imagerie RGB seule. Une détection rapide et précise des ravageurs est essentielle pour prévenir leur propagation.
4. Estimation du rendement : Le comptage aérien des fruits, des épis de céréales ou des plantes permet de prédire les volumes de récolte. Les modèles entraînés à détecter les pommes, les melons ou les épis de blé sur des images de drones peuvent accélérer l'estimation des rendements. Par exemple, des réseaux neuronaux appliqués à des images de drones ont été utilisés pour compter les cultures de pastèques et de melons dans les champs.
5. Levés topographiques et cartographie : Les drones permettent également de créer des cartes des parcelles (topographie, variations de sol) qui facilitent la planification des cultures. Bien que n'étant pas à proprement parler une détection d'objets, cette fonction fait partie intégrante de la surveillance par drones.
Ces tâches exigent souvent un traitement quasi instantané : un drone survolant des champs peut avoir besoin de traiter des images vidéo en temps réel (plusieurs images par seconde) afin que des décisions de contrôle (comme l’ajustement de l’altitude ou l’activation d’un pulvérisateur) puissent être prises immédiatement. Dans d’autres cas, de légers délais (quelques secondes) peuvent être acceptables si les données sont enregistrées et analysées après l’atterrissage.
Il est essentiel que la vision embarquée des drones puisse s'adapter aux variations environnementales : forte luminosité, ombres, flou de mouvement dû au vent, occlusion par le feuillage, changements d'altitude et d'angle. La taille des objets étant variable (mauvaises herbes proches ou groupes de ravageurs éloignés), les détecteurs doivent gérer des caractéristiques multi-échelles.
Enfin, les missions de drones agricoles impliquent des compromis essentiels entre précision, latence et consommation d'énergie. Une grande précision de détection est nécessaire pour éviter de manquer des mauvaises herbes ou des ravageurs, mais un réseau très dense peut vider rapidement la batterie. Un modèle de détection doit donc être rapide et économe en énergie, tout en étant suffisamment précis pour la tâche. Ces exigences strictes soulignent la nécessité d'une conception de modèle spécialisée pour les drones agricoles.
Détecteurs d'objets légers pour plateformes de drones
Les détecteurs d'objets légers sont des réseaux neuronaux conçus spécifiquement pour fonctionner sur du matériel aux ressources limitées. Ils utilisent souvent des architectures de base réduites (comme MobileNet ou ShuffleNet), des couches plus fines ou des architectures de tête et de cou simplifiées. Par exemple, les modèles de la famille YOLO comprennent des versions “ nano ” et “ tiny ” (par exemple YOLOv8n, YOLOv5s) qui possèdent moins de paramètres et nécessitent moins d'opérations (FLOPs).
Ces détecteurs peuvent fonctionner à plusieurs dizaines d'images par seconde sur des systèmes embarqués tels que NVIDIA Jetson Nano ou Google Coral. Par exemple, Ag-YOLO était un détecteur personnalisé basé sur YOLO, conçu pour les plantations de palmiers. Il fonctionnait à 36,5 images par seconde sur un Intel Neural Compute Stick 2 (avec une consommation de seulement 1,5 W) et atteignait une précision élevée (F1 = 0,9205). Ce modèle utilisait environ douze fois moins de paramètres que YOLOv3-Tiny, tout en doublant sa vitesse.

Ces exemples illustrent les compromis à faire lors de la conception de modèles : réduire la taille ou la complexité d’un modèle (par exemple, en diminuant le nombre de couches ou de canaux) accélère généralement l’inférence et réduit la consommation d’énergie, mais peut nuire à la précision. Ag-YOLO a sacrifié une partie de sa capacité pour gagner en vitesse et en efficacité, tout en conservant un score F1 élevé de 0,92 pour sa tâche.
De même, trois variantes de YOLOv7 ont été comparées pour la détection des mauvaises herbes : la version complète de YOLOv7 a atteint une précision de 83%, tandis qu’une version plus légère, YOLOv7-w6, a chuté à une précision de 63%. Ceci illustre une limite des détecteurs génériques légers : les modèles optimisés pour un environnement ou un type d’objet donné peuvent être moins performants dans un autre. Un détecteur allégé pour la vitesse risque de manquer des indices subtils (par exemple, les petites mauvaises herbes ou les herbes camouflées), ce qui nuit à sa robustesse dans des conditions variables.
En agriculture, ces réseaux légers génériques peuvent ne pas être optimaux sans ajustements supplémentaires. Par exemple, un modèle YOLOv7 pré-entraîné sur des jeux de données courants peut ne pas gérer parfaitement les textures et les échelles spécifiques aux images de cultures. Il est donc nécessaire d'optimiser l'architecture du modèle en fonction de la tâche et de la plateforme. Le réglage manuel (modification des couches, des filtres, etc.) pour chaque nouveau type de drone ou variété de culture est fastidieux. Cela justifie le recours à des méthodes automatisées, telles que le NAS adapté au déploiement, afin de trouver le meilleur compromis entre taille, précision et robustesse pour une plateforme de drone et une application agricole données.
Recherche d'architecture neuronale dans les systèmes de vision embarqués sur drones
La recherche d'architectures neuronales (NAS) est une méthode automatisée de conception d'architectures de réseaux neuronaux. Au lieu de définir manuellement le nombre de couches, de filtres et de connexions, la NAS utilise des algorithmes (apprentissage par renforcement, méthodes évolutionnaires ou recherche par gradient) pour explorer un espace de conceptions possibles et trouver celles qui optimisent un objectif choisi (comme la précision).
L'architecture NAS a déjà été utilisée pour créer des réseaux adaptés aux appareils mobiles. Par exemple, MnasNet de Google était une architecture NAS “ sensible à la plateforme ” pionnière, intégrant directement la latence réelle de l'appareil dans sa fonction objectif. MnasNet mesurait le temps d'inférence sur un téléphone Google Pixel pour chaque modèle candidat lors de la recherche, et pondérait la précision en fonction de cette latence mesurée. Il en a résulté une famille de réseaux de neurones convolutifs (CNN) à la fois rapides et précis sur matériel mobile, surpassant les modèles MobileNet et NASNet conçus manuellement sur ImageNet.
Cependant, les approches NAS génériques comme MnasNet se concentrent sur des tâches de vision générales (classification ImageNet ou détection COCO) et sur du matériel standard (ex. : téléphones mobiles). Pour la surveillance des cultures par drone, le problème est plus spécifique. Nous recherchons des détecteurs optimisés pour des classes d'objets spécifiques (plantes, mauvaises herbes, ravageurs) et adaptés aux capteurs et au profil de vol du drone. Un système NAS standard qui optimise uniquement la précision ou la latence risque de négliger des subtilités telles que la détection de petits objets ou les contraintes énergétiques.
De plus, les méthodes NAS traditionnelles peuvent s'avérer très gourmandes en ressources de calcul (nécessitant souvent plusieurs jours sur de grands clusters de GPU), ce qui n'est pas toujours envisageable pour les chercheurs en agriculture. Par conséquent, des cadres NAS spécifiques à la vision par drone sont nécessaires. Ces cadres doivent intégrer des critères pertinents pour les drones et être aussi efficaces que possible.
Dans tous les cas, la prise en compte des contraintes est essentielle : le NAS doit connaître les contraintes du dispositif cible (comme MnasNet) et les exigences en temps réel des tâches du drone en vol. Si la recherche est trop lente ou néglige la consommation d’énergie, le modèle obtenu risque de ne pas être performant sur le terrain.
En pratique, le NAS pour la vision par drone intégrerait directement la latence matérielle et la consommation d'énergie dans ses critères de recherche. Par exemple, on pourrait mesurer la fréquence d'images d'un détecteur candidat sur l'ordinateur de bord du drone (comme un NVIDIA Jetson) et l'utiliser comme score. Ceci contraste avec l'utilisation de simples indicateurs indirects comme les FLOP, qui ne reflètent pas la vitesse réelle.
Ce faisant, le NAS peut identifier les architectures qui exploitent au mieux les capacités du dispositif. En résumé, le NAS permet de concevoir automatiquement des détecteurs pour drones, mais il doit être adapté aux tâches spécifiques et aux exigences d'efficacité de ces derniers.
NAS prenant en compte le déploiement : Principes fondamentaux
Le NAS prenant en compte le déploiement étend le NAS prenant en compte le matériel en intégrant le contexte de déploiement et les contraintes environnementales dès la conception. Autrement dit, il tient compte non seulement du matériel du drone (vitesse du processeur/GPU, limites de mémoire, consommation énergétique), mais aussi des conditions réelles auxquelles le drone sera confronté sur le terrain. Cela implique une optimisation explicite de paramètres tels que la latence d'inférence sur le périphérique cible, la consommation d'énergie et l'empreinte mémoire, tout en garantissant une précision de détection élevée.
Par exemple, lors de la phase NAS, chaque modèle candidat pourrait être déployé sur un Jetson Nano embarqué sur le drone, et son temps d'inférence et sa consommation énergétique réels enregistrés. Ce retour d'information empirique permet d'orienter la recherche vers des modèles répondant véritablement aux critères de déploiement.
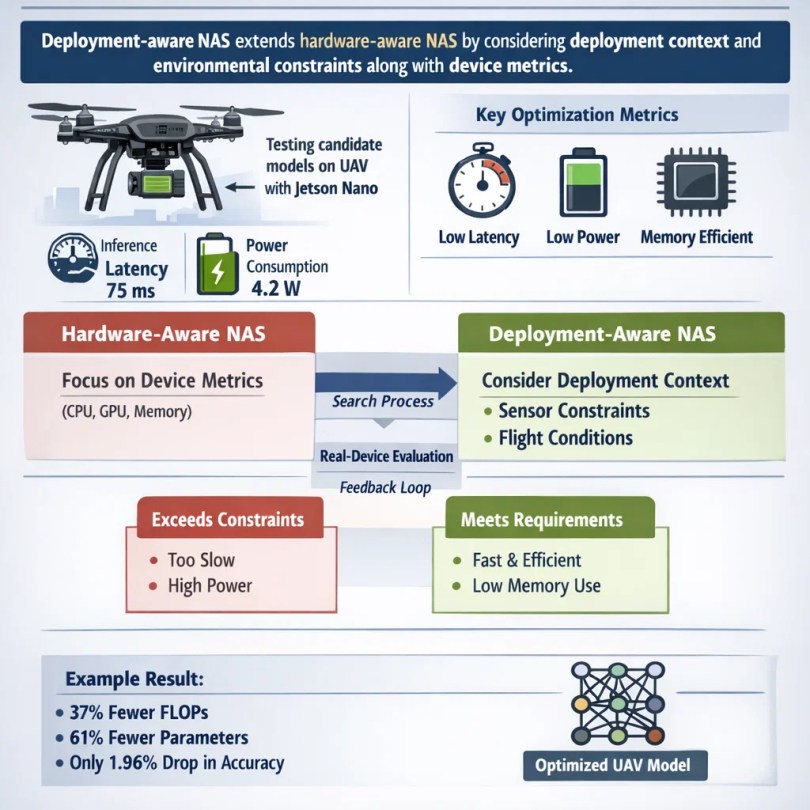
Les NAS prenant en compte le matériel (comme MnasNet) se concentrent sur les métriques des périphériques, tandis que les NAS prenant en compte le déploiement vont plus loin : ils peuvent considérer les caractéristiques d’entrée des capteurs (par exemple, la résolution d’image, les canaux multispectraux) et les objectifs de latence des applications (nombre d’images par seconde requis). Ils peuvent même intégrer des contraintes de vol telles que la mémoire maximale autorisée ou inclure des évaluations sous simulation de secousses dues au vent ou de flou de mouvement.
Un NAS adapté au déploiement peut pénaliser les architectures consommant plus de 5 W, par exemple, ou nécessitant plus de mémoire que celle disponible sur le drone. Ainsi, la recherche privilégie naturellement les modèles pratiques pour l'utilisation du drone sur le terrain. En résumé, un NAS adapté au déploiement vise à faire le lien entre la conception du modèle et son utilisation réelle. Plutôt que de choisir une architecture isolément en espérant qu'elle fonctionne, il intègre systématiquement des tests sur des appareils réels lors de la recherche.
Par exemple, Kerec et al. (2026) ont utilisé un tel cadre pour la recherche d'un détecteur de drones : ils se sont appuyés sur une base YOLOv8n, mais ont intégré la latence et la consommation énergétique du Jetson Nano dans leur recherche. Le modèle obtenu présentait 371 TP3T GFLOPs et 611 TP3T paramètres en moins que YOLOv8n, avec une baisse de mAP de seulement 1,961 TP3T. Ceci illustre clairement comment les contraintes de déploiement ont orienté le NAS vers un réseau beaucoup plus léger et rapide.
Rôle des NAS adaptés au déploiement dans la surveillance de l'agriculture de précision
Un système NAS adapté au déploiement peut considérablement améliorer la surveillance des cultures par drone en optimisant les détecteurs en fonction des conditions agricoles. Par exemple, une recherche peut privilégier les architectures performantes pour la détection d'objets petits et fins (comme les mauvaises herbes étroites ou les jeunes plants de maïs) ou pour la distinction entre les plantes et le sol. Elle peut ajuster la profondeur du réseau et les champs réceptifs à l'altitude de vol typique : à basse altitude, les objets remplissent l'image et nécessitent une détection précise des détails, tandis qu'à plus haute altitude, le réseau doit être performant pour la détection à petite échelle. Un système NAS adapté au déploiement peut intégrer ces exigences dans son espace de recherche.
La rapidité est essentielle sur le terrain. Imaginez un drone détectant une infestation de nuisibles ; si le modèle est suffisamment rapide pour traiter la vidéo à, par exemple, 30 images par seconde, il peut alerter le pilote ou déclencher une intervention immédiate. Lors de tests, un modèle conçu par NAS s'est avéré 28% plus rapide sur un Jetson Nano que le YOLOv8n standard, grâce à son architecture optimisée. Il a également consommé 18,5% d'énergie en moins sous ONNX, ce qui lui permet de voler plus longtemps avec la même batterie. Ces gains facilitent la prise de décision en vol et prolongent la durée des missions.
La robustesse est un autre avantage. Puisque la recherche basée sur la détection d'anomalies (NAS) et prenant en compte le déploiement implique une évaluation réelle du dispositif, la recherche peut inclure des tests dans des conditions variées. Par exemple, elle peut simuler une faible luminosité ou inclure des images d'entraînement prises à l'aube et au crépuscule, garantissant ainsi que le détecteur final conserve sa précision malgré les variations météorologiques et d'éclairage réelles. Les travaux ont démontré que le détecteur issu de la NAS généralisait bien : testé sur deux jeux de données de cultures différents (épis de blé et plantules de coton), il a obtenu d'excellents résultats dans les deux cas.

Cela suggère que le NAS adapté au déploiement a permis d'identifier des fonctionnalités communes et utiles pour l'agriculture, améliorant ainsi sa généralisation à de nouveaux domaines. Globalement, le NAS adapté au déploiement contribue à un meilleur équilibre entre précision et autonomie de vol. En réduisant la charge de calcul, les drones consomment moins d'énergie et peuvent couvrir une plus grande superficie par charge de batterie, tout en assurant une détection fiable des cultures et des ravageurs.
Conception de l'espace de recherche pour les détecteurs de drones agricoles
Un élément important des systèmes NAS adaptés au déploiement est l'espace de recherche, c'est-à-dire l'ensemble des architectures réseau possibles qu'il prend en compte. Pour les détecteurs de cultures par drone, cet espace de recherche peut être conçu pour inclure des architectures prometteuses dans ce domaine. Les éléments clés sont les suivants :
1. Conception de la structure principale : L'élément central est l'extracteur de caractéristiques. Pour les drones, on peut utiliser des blocs de construction convolutionnels légers, tels que des convolutions séparables en profondeur (comme dans MobileNet) ou des blocs de résidus inversés. Les résidus inversés et les goulots d'étranglement linéaires (de type MobileNetV2) sont reconnus pour leur efficacité sur les appareils mobiles. L'espace de recherche permet de faire varier la largeur (nombre de canaux) et la profondeur de chaque bloc afin de s'adapter aux ressources de calcul du drone. Des modules d'attention ou inspirés des transformateurs peuvent également être intégrés si le drone peut les supporter à faible consommation.
2. Conception du col : De nombreux détecteurs d'objets utilisent des pyramides de caractéristiques (FPN) ou des réseaux d'agrégation de chemins pour combiner des caractéristiques multi-échelles. La recherche pourrait explorer des FPN simplifiées ou une agrégation de caractéristiques allégée. Par exemple, l'utilisation d'une tête mono-échelle ou multi-échelle pourrait être envisagée. L'espace de recherche pourrait permettre le regroupement de couches ou l'ajout de connexions résiduelles pour faciliter la détection d'objets de tailles différentes.
3. Conception de la tête : La couche de détection (classification et régression de boîtes) peut également être modifiée. Pour les drones observant des champs uniformes, une couche plus simple peut suffire. En revanche, pour détecter les petites plantes indésirables, la recherche peut inclure des couches de convolution supplémentaires ou différents schémas d'ancrage.
4. Opérations légères : L'espace de recherche peut explicitement limiter les opérations à faible coût. Par exemple, choisir entre une convolution 3×3 et une convolution factorisée 1×3+3×1 moins coûteuse, ou inclure des modules GhostNet. Il peut également autoriser des noyaux de petite taille ou des dimensions réduites pour limiter les calculs. Tous ces choix sont dictés par le matériel. L'espace peut interdire toute configuration de couches dépassant la limite de mémoire du drone ou son seuil énergétique prévu.
En concevant soigneusement cet espace de recherche, le processus NAS est orienté vers des architectures à la fois performantes et efficaces. Il peut en résulter une combinaison inédite de blocs non prise en compte dans les modèles standards. Le meilleur détecteur trouvé utilise des sélections de blocs personnalisées qui réduisent les GFLOPs de 371 TP3T et le nombre de paramètres de 611 TP3T par rapport à YOLOv8n.
Cela a été possible car le NAS pouvait combiner différents éléments de base et de tête en fonction des contraintes du drone. En résumé, la recherche de détecteurs pour drones agricoles s'oriente vers des modules modulaires légers et évolutifs, ainsi que vers une gestion multi-échelle, le tout dans les limites du matériel embarqué.
Objectifs et contraintes d'optimisation
Un système NAS adapté au déploiement doit concilier plusieurs objectifs. L'objectif principal est généralement la précision de détection (par exemple, la précision moyenne, mAP), mesurée sur des jeux de données de surveillance des cultures. Par exemple, la mAP@50 (précision à 50% IOU) est une métrique courante. Le modèle optimisé pour NAS n'a enregistré qu'une baisse de 1,96% de mAP@50 par rapport au modèle YOLOv8n de base, une perte très faible au regard des gains obtenus. La précision et le rappel (ou score F1) sur les classes clés (mauvaises herbes, cultures) sont également pris en compte.
Parallèlement, la latence et la consommation d'énergie doivent être optimisées. La latence correspond au temps d'inférence par image ; pour un GPU embarqué, elle peut atteindre 20 à 50 ms, voire plus. Une latence plus faible se traduit par des fréquences d'images plus élevées. La consommation d'énergie (joules par image) est cruciale pour l'autonomie en vol. L'empreinte mémoire (nombre de paramètres, taille du modèle) constitue une autre contrainte ; les modèles doivent tenir dans la RAM du périphérique. C'est pourquoi les NAS définissent généralement un objectif ou une pénalité pour ces contraintes.
Par exemple, tout modèle dont la vitesse est inférieure à un certain seuil ou qui dépasse un budget de paramètres donné peut être déclassé. Cela transforme de fait le NAS en un problème d'optimisation multi-objectif : maximiser la précision tout en minimisant la latence, la consommation d'énergie et la taille.
Concrètement, cela pourrait se faire par une somme pondérée d'objectifs ou par des contraintes strictes. Certaines méthodes pénalisent fortement tout candidat dépassant la limite de puissance du drone. D'autres calculent explicitement une métrique énergétique : les modèles ont été testés sous ONNX pour mesurer leur “ efficacité énergétique ”, et le meilleur modèle s'est avéré 18,51 TP3T plus économe en énergie que YOLOv8n. C'était l'un des objectifs qui ont guidé leur recherche.
Les compromis observés peuvent être visualisés sur un front de Pareto : d’un côté, des modèles compacts extrêmement rapides mais moins précis ; de l’autre, des modèles précis et volumineux, mais trop lents ou énergivores pour un drone. Le NAS, conçu pour le déploiement, vise à trouver un point d’équilibre sur ce front, correspondant aux priorités réelles de la mission (par exemple, une légère perte de précision pour un gain de vitesse important). En résumé, le NAS doit prendre en compte simultanément les métriques de précision (mAP, F1) et les contraintes d’inférence (ms par image, joules par image, mémoire). Cette optimisation équilibrée est ce qui rend un modèle véritablement opérationnel pour une utilisation sur drone.
Formation et évaluation dans des contextes agricoles réalistes
Pour que les détecteurs NAS fonctionnent correctement, ils doivent être entraînés et testés sur des données agricoles réalistes. Cela implique l'utilisation d'ensembles de données qui capturent la variabilité des parcelles réelles : différentes espèces cultivées, stades de croissance, saisons, conditions d'éclairage et altitudes. Par exemple, un entraînement basé uniquement sur des images de jeunes pousses de maïs risque de ne pas être généralisable aux épis de blé matures. Des ensembles de données représentatifs des parcelles garantissent que le modèle apprenne les caractéristiques pertinentes pour l'exploitation. L'augmentation des données (cultures aléatoires, variations de luminosité, flou de mouvement) peut également être appliquée lors de l'entraînement pour simuler les mouvements et l'éclairage des drones.

Lors de l'évaluation, il est crucial de tester le modèle dans des conditions aussi réalistes que possible. Les outils de simulation peuvent s'avérer utiles (par exemple, le vol virtuel d'un drone au-dessus de champs 3D), mais les essais en vol réel restent la référence absolue. L'évaluation des performances embarquées est réalisée en exécutant le modèle directement sur le matériel du drone. Après la phase NAS, le modèle candidat a été déployé sur un Jetson Nano, ce qui a permis de mesurer une inférence 28,1% plus rapide (comparativement à la version de référence YOLOv8n) et une consommation d'énergie réduite. Ce type de retour d'expérience sur un appareil réel confirme que la recherche a abouti à un modèle répondant pleinement aux exigences.
La généralisation est également cruciale. Un modèle peut être conçu et entraîné sur une culture spécifique (par exemple, le blé), mais les agriculteurs ont besoin de détecteurs fonctionnant sur plusieurs parcelles. L'étude a démontré une forte généralisation inter-cultures : le détecteur issu du NAS, entraîné sur une tâche, a conservé d'excellentes performances sur un jeu de données d'une autre culture (plantules de coton) sans réentraînement. Cela suggère que le NAS, adapté au déploiement, peut fournir des architectures robustes. Cependant, les changements de domaine (par exemple, le passage des champs de maïs aux vergers) peuvent nécessiter un ajustement ou des recherches complémentaires. Des tests inter-saisons (images d'été et d'automne) sont également recommandés.
Enfin, chaque nouveau modèle doit être testé sur une plateforme de drones avant son déploiement. Cela inclut l'enregistrement de sa précision et de sa vitesse sur les drones, la vérification de l'absence de surchauffe du matériel et la contrôle de sa consommation électrique. Ce n'est qu'à ces conditions que les agriculteurs pourront lui faire confiance pour la surveillance des zones critiques. En combinant une formation adaptée au terrain et une évaluation rigoureuse du matériel, les systèmes NAS adaptés au déploiement permettent de fournir des détecteurs non seulement efficaces en théorie, mais aussi éprouvés sur le terrain.
Avantages par rapport aux détecteurs de drones conçus manuellement
Le NAS adapté au déploiement offre plusieurs avantages indéniables par rapport aux modèles traditionnels conçus manuellement pour les drones :
1. Meilleurs compromis en matière de performances : Les modèles trouvés par NAS offrent généralement de meilleures combinaisons de précision, de vitesse et d'efficacité énergétique. Par exemple, le meilleur modèle a été 28% plus rapide et a consommé 18,5% d'énergie en moins sur Jetson Nano que le modèle de référence YOLOv8n sélectionné manuellement, tout en ne perdant qu'environ 2% en mAP de détection. Obtenir un tel équilibre manuellement serait très difficile.
2. Généralisation améliorée : Les modèles découverts par NAS sont plus adaptables aux nouvelles conditions, car la recherche peut intégrer des données ou des objectifs variés. Le détecteur conçu automatiquement s'est avéré performant pour différents types de cultures (blé et coton) et de conditions d'éclairage. Cette grande robustesse est essentielle lorsque les vols rencontrent des situations imprévues.
3. Réduction des efforts d'ingénierie : NAS automatise de nombreux essais et erreurs. Au lieu d'ajuster manuellement la taille des couches et de tester de nombreuses solutions, un NAS adapté au déploiement explore itérativement les options et trouve la conception optimale. Cela permet de gagner du temps de développement et de mobiliser des compétences, tout en simplifiant la mise à jour des détecteurs pour de nouvelles tâches ou de nouveaux matériels.
4. Évolutivité : Une fois configuré, le système NAS peut être utilisé pour différentes plateformes de drones ou missions. Par exemple, ce même système NAS, adapté au déploiement, peut rechercher un détecteur optimisé pour une résolution de caméra ou un modèle de drone différent en modifiant simplement les paramètres d'entrée. Cette approche est bien plus flexible que de repenser entièrement les réseaux pour chaque scénario.
Défis et limites
Le NAS adaptatif au déploiement est puissant, mais pas une solution miracle. Son utilisation doit être réfléchie, en tenant compte de ses besoins en ressources et de la variabilité de l'environnement cible. Malgré son potentiel, le NAS adaptatif au déploiement présente des défis :
1. Coût de recherche élevé : L'exploration de l'espace d'architecture NAS peut nécessiter une puissance de calcul considérable. Même avec des algorithmes performants, elle peut prendre de nombreuses heures de calcul GPU (ou des ressources de calcul spécialisées). Sans une gestion rigoureuse, cette surcharge de recherche peut s'avérer prohibitive pour certaines équipes.
2. Biais des données et décalage de domaine : La qualité du NAS dépend de la qualité des données utilisées. Si les images d'entraînement ne sont pas représentatives des conditions réelles, l'architecture trouvée risque d'être moins performante en pratique. Par exemple, un modèle optimisé pour un type de culture ou une région géographique donnés pourrait ne pas être parfaitement adaptable à d'autres sans adaptation supplémentaire.
3. Hétérogénéité matérielle : Le matériel des drones se décline en de nombreuses versions (différents GPU, CPU et FPGA embarqués). Un modèle optimisé pour une carte peut ne pas l'être pour une autre. Les NAS prenant en compte le déploiement doivent soit relancer les recherches pour chaque plateforme, soit utiliser des critères de sélection restrictifs compatibles avec toutes, ce qui peut limiter les performances.
4. Contraintes pratiques : Le déploiement concret de drones en agriculture implique des problématiques telles que les mises à jour du réseau à distance, l'intégration du système avec le contrôle de vol et la certification de sécurité. Même le meilleur modèle de système d'aide à la conduite (NAS) doit être intégré à un système de drone complet. La coordination des mises à jour des modèles, des approbations réglementaires et de la formation des agriculteurs représente un défi non technique.
Orientations futures
L'avenir verra probablement une intégration encore plus étroite de la conception des modèles, des technologies de capteurs et du contrôle des drones. Les systèmes NAS adaptés au déploiement resteront un outil clé dans ce processus de co-conception. Plusieurs pistes prometteuses se dessinent :
1. NAS en ligne et adaptatif : Au lieu d'une recherche hors ligne ponctuelle, les systèmes futurs pourraient ajuster le réseau en temps réel ou entre les vols. Par exemple, un drone pourrait démarrer avec un modèle de base et, grâce à des algorithmes NAS légers, s'adapter en temps réel aux nouvelles conditions d'éclairage ou de terrain. Ce “ NAS embarqué ” représente un défi de taille, mais pourrait considérablement améliorer l'adaptabilité.
2. Co-conception des capteurs et des modèles : Les futurs systèmes d'agriculture de précision pourraient optimiser conjointement le choix de la caméra (RGB, multispectrale, infrarouge) et du réseau neuronal. Les systèmes de réseau neuronal (NAS) adaptés au déploiement pourraient intégrer les paramètres des capteurs (comme les bandes spectrales utilisées) dans leur recherche, afin de trouver la meilleure combinaison de matériel et de modèle.
3. Intégration multispectrale/hyperspectrale : Comme le suggère l'étude sur les maladies du coton, l'intégration d'images multispectrales peut améliorer la détection, notamment des problèmes à un stade précoce. Les futurs systèmes d'observation du sol pourraient explorer des modèles multispectraux fusionnant les canaux RVB et proche infrarouge afin de détecter plus efficacement les changements subtils chez les plantes.
4. Chaînes de décision autonomes : À terme, les détecteurs optimisés pour les systèmes NAS pourraient permettre une autonomie complète. Par exemple, un drone pourrait générer automatiquement un plan de pulvérisation ou alerter les responsables agricoles s'il détecte certaines conditions. Les systèmes NAS adaptés au déploiement pourraient être étendus à des chaînes de traitement complètes (modèles de détection et d'action), optimisant ainsi l'ensemble du système.
5. Considérations éthiques et environnementales : À mesure que les drones gagnent en capacités, il est impératif de prendre en compte le respect de la vie privée, la sécurité de l'espace aérien et les répercussions sur le travail agricole (comme l'ont souligné Agrawal et Arafat). Garantir une utilisation responsable des drones optimisés pour le NAS en agriculture constitue un objectif majeur pour l'avenir.
Conclusion
L'approche NAS (Network Access Research) adaptée au déploiement représente une solution performante pour concevoir des détecteurs d'objets légers destinés à la surveillance des cultures par drone. En intégrant les contraintes matérielles et de mission du drone dans la recherche, elle génère des modèles qui permettent de réduire la consommation d'énergie et les coûts de calcul sans compromettre significativement la précision. Par exemple, des travaux récents ont démontré qu'un détecteur conçu avec NAS utilisait 371 TP3T d'opérations en virgule flottante (FLOP) et 611 TP3T de paramètres en moins que le détecteur de référence YOLOv8n, tout en conservant une mAP (précision relative moyenne) réduite de seulement ~21 TP3T.
Sur les drones eux-mêmes, cela s'est traduit par une inférence plus rapide (28%) et une meilleure efficacité énergétique (18%). Ces gains permettent d'allonger l'autonomie des vols, d'accélérer l'analyse et d'offrir un soutien agricole plus réactif. Comparé aux modèles conçus manuellement, le NAS adapté au déploiement offre une meilleure généralisation des performances, un effort de réglage manuel réduit et une évolutivité vers de nouvelles plateformes de drones.
Dans le contexte de l'agriculture de précision, ces améliorations rendent la surveillance des cultures par drones plus pratique et efficace. Les drones équipés de détecteurs optimisés pour les réseaux de neurones artificiels (NAS) repèrent plus facilement les adventices, les ravageurs et le stress hydrique, permettant des interventions opportunes qui économisent les ressources et augmentent les rendements. À mesure que l'agriculture adopte les drones et l'intelligence artificielle, les NAS adaptés au déploiement joueront un rôle central pour garantir l'efficacité, la précision et l'applicabilité sur le terrain des modèles embarqués. Ils comblent le fossé entre la recherche de pointe sur les réseaux de neurones et les besoins concrets des agriculteurs, contribuant ainsi à façonner l'avenir d'une agriculture de précision axée sur les données.
Surveillance des cultures