

Aastaid on mullaharimine olnud põllumajanduses üks levinumaid põllutöid. Põllumehed valmistavad oma maad traditsiooniliselt ette kogu põllu kündmise, kobestamise või sama sügavuse ja intensiivsusega harimise teel. Seda lähenemisviisi, mida tuntakse ühtlase või kogu põllu mullaharimisena, on lihtne hallata ja planeerida. Selle meetodi põhieeldus on, et mulla seisund on kogu põllul sama.
Sissejuhatus: Ühtlase harimise probleem
Kaasaegne mullateadus ja välitööd näitavad aga selgelt, et see eeldus on vale. Mulla tingimused on harva ühtlased, isegi väikestel põldudel. Erinevused mulla tekstuuris, niiskuses, orgaanilises aines, kaldes, drenaažis ja masinaliikluses loovad mulla struktuuris suuri erinevusi. Selle varieeruvuse üks olulisemaid ja kahjulikumaid tagajärgi on mulla tihenemine.
Pinnase tihenemine ei toimu ühtlaselt. Mõned alad, eriti põllupeenrad ja tehnoradade äärsed alad, tihenduvad korduva masinaliikluse tõttu tugevalt. Teised alad võivad jääda kobedaks ja hästi struktureeritud. Kui põllumees rakendab kõikjal sama harimissügavust, saavad mõned alad liiga palju harimist, teised aga liiga vähe.
Ühtlase mullaharimise rakendamise kulud sellele loomupäraselt muutlikule probleemile on nii majanduslikust kui ka ökoloogilisest seisukohast märkimisväärsed. Looduslikult hea struktuuriga või minimaalse tihenemisega aladel kujutab sügavharimine endast puhast raiskamist – see põletab diislikütust, mida saaks kokku hoida, kulutab töötunde, mida saaks mujale suunata, kiirendab väärtusliku mulla orgaanilise aine lagunemist liigse oksüdeerimise kaudu, hävitab mulla agregaatide keeruka arhitektuuri, mille moodustumine võttis aastaid, ning jätab mullapinna paljaks ja haavatavaks tuule ja vee erosioonijõudude suhtes. Uuringud on näidanud, et sügavharimine võib kulutada 30–501 TP3 T rohkem kütust kui pindmine mullaharimine, muutes ebavajaliku sügavharimise suureks majanduslikuks koormuseks.
USDA Põllumajandusuuringute Talituse hiljutised uuringud näitavad, et ebavajalik mullaharimine võib tundlikes muldades kiirendada mulla orgaanilise aine kadu 2–4% võrra aastas. Seevastu piirkondades, kus on tugev pinnase tihenemine – kõvad pannid, mis tekivad 8–16 tolli sügavusel pinna all –, ebaõnnestub ühtlane pindmine mullaharimine täielikult. See koorib pinna, jättes juurte kasvu takistava kihi terveks, luues nn vale mulla, mis näeb pealtnäha hea välja, kuid ei lahenda midagi juurte kasvu ja vee liikumise aluseks oleva piirangu lahendamiseks.
See toob meid täppispõllumajanduse lahenduseni, mis kujundab ümber tänapäevast mullaharimisfilosoofiat: muutuva määraga mullaharimine (VRT). VRT kujutab endast põhimõttelist nihet üldistelt töötlustelt sihipäraste sekkumiste poole. See rakendab mulla häiringu täpset tüüpi, sügavust ja intensiivsust ainult siis, kui see on mulla seisundi andmetega diagnostiliselt põhjendatud. Selle lähenemisviisi keskmes on mulla tihenemise kaardistamine – mulla tugevuse süstemaatiline mõõtmine ja ruumiline analüüs põldudel.
Mis on pinnase tihendamine?
Mulla tihenemine toimub siis, kui mullaosakesed surutakse üksteisele lähemale, vähendades pooride ruumi. See muudab mulla tihedamaks ja juurtel, õhul ja veel on raskem sellest läbi pääseda. Tihenenud mullas on vähem suuri poore, mis on hapniku liikumise ja vee imbumise jaoks hädavajalikud.

Tihenemine toimub sageli pinna all, moodustades kõva kihi, mis on nähtamatu, kuid piirab oluliselt põllukultuuride liikumist. Pinnase tihenemise peamised põhjused on:
- Rasketehnika liiklus, eriti korduvad möödasõidud
- Mullaharimine ja koristamine märjal pinnasel
- Kaasaegsete seadmete suured teljekoormused
- Kariloomade tallamine mõnes süsteemis
- Madal orgaanilise aine sisaldus, mis nõrgestab mulla struktuuri
Peene tekstuuriga mullaga (savi ja muda) põllud on tihenemisele vastuvõtlikumad kui liivased mullad, eriti niisketes oludes. Mõned levinumad tihenemise tüübid on:
- Pinna tihendamine: Esineb mulla 5–10 cm kihis. See mõjutab seemnete tärkamist ja varajast juurte kasvu.
- Aluspinnase tihendamine: Esineb sügavamal (20–40 cm) ja on tõsisem. See piirab sügavate juurte kasvu ja vee liikumist ning võib püsida aastaid, kui seda ei parandata.
Sihtasutus: Pinnase tihendamise kaardistamine
Täppispõllumajanduse aluspõhimõte on see, et ilma mõõtmisteta ei saa muutlikkust tõhusalt hallata. Enne mis tahes intelligentsete mullaharimisotsuste langetamist peab põllumees omandama üksikasjaliku ja täpse arusaama sellest, kuidas mulla tihenemine tema maal varieerub. See eeldab liikumist juhuslikest sondeerimiskontrollidest ja subjektiivsetest hinnangutest süstemaatilise ja andmerikka mulla tugevuse kaardistamiseni asjakohastel sügavustel kogu tootmispiirkonnas.
A. Andmete kogumise meetodid ja tehnoloogiad
Tänapäeval on põllumeestel mitu tööriista, et oma mullaprofiili "näha" ilma lõputuid auke kaevamata.
1. Otsene tuvastamine: Liikuvad penetromeetrid on tihendamise mõõtmise kuldstandard. Traktorile, UTV-le või spetsiaalsele kelgule paigaldatud instrumendid suruvad pinnasesse standardiseeritud koonuse ja mõõdavad takistust (nn koonuseindeksit) erinevatel sügavustel. Kaasaegsed süsteemid, näiteks Veris Technologiesi või Topconi süsteemid, salvestavad tuhandeid andmepunkte aakri kohta koos GPS-koordinaatidega, luues tiheda ja kõrge eraldusvõimega kaardi pinnase tugevusest.
Täppispõllumajanduse Assotsiatsiooni hiljutised 2024. aasta andmed näitavad, et penetromeetril põhinev kaardistamine saavutab õige mulla niiskuse juures (lähivälja läbilaskevõime) üle 92% täpsuse tihendatud tsoonide tuvastamisel, mis piiravad juurte kasvu.
2. Kaudne/proksimaalne tuvastamine: Elektromagnetilise induktsiooni (EMI) andurid, mis kaardistavad pinnase elektrijuhtivust (EC), on võimsad abivahendid. Kuigi EC-d mõjutavad savisisaldus, niiskus ja soolsus, korreleerub see sageli tugevalt tihendusvöönditega. Märgadel, tihendatud savialadel on tavaliselt kõrge EC. Ettevõtted nagu Geonics, Dualem ja Veris pakuvad seadmeid, mis genereerivad EC-kaarte kiiresti, pakkudes pinnase varieeruvuse andmete aluskihti.
Nebraska-Lincolni ülikooli 2023. aasta uuringu kohaselt suudab EMI andmed strateegiliste penetromeetri mõõtmistega kalibreerides ja mulla tekstuurikaartidega kombineerides ennustada tihenemistsoone 85–90% usaldusväärsusega, mis teeb sellest suurepärase luurevahendi.
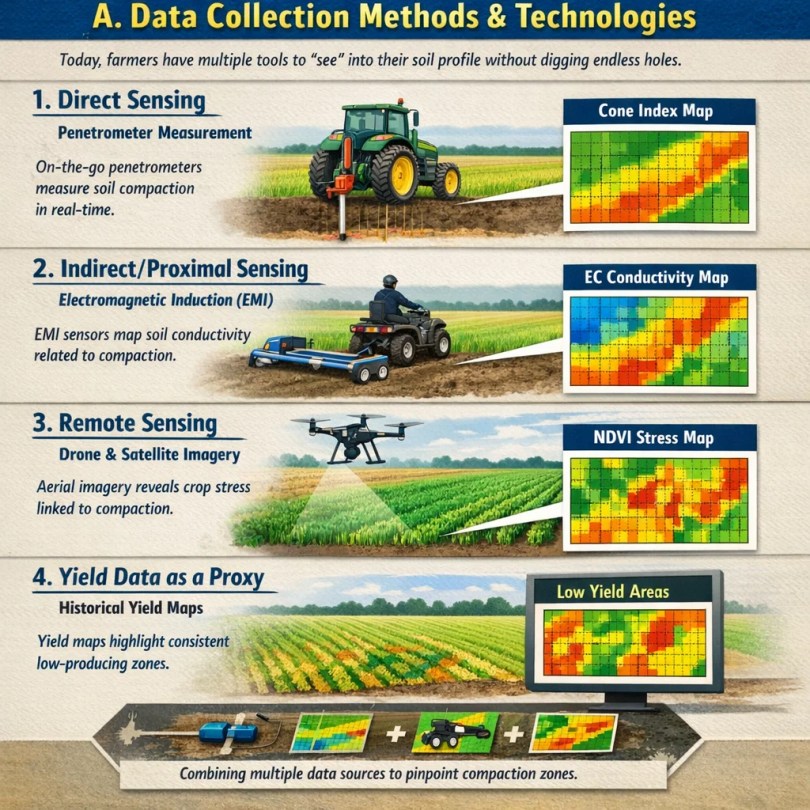
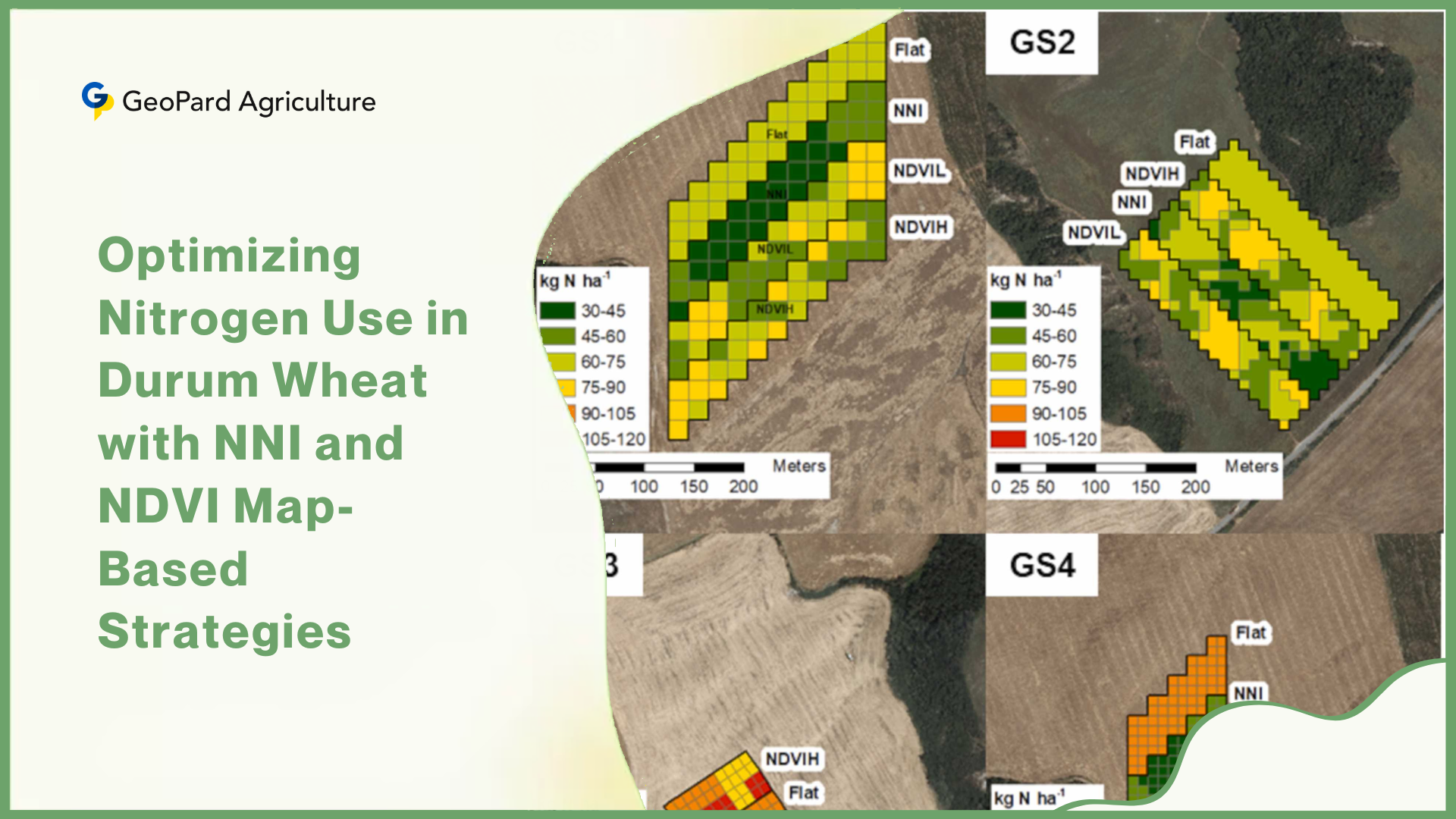
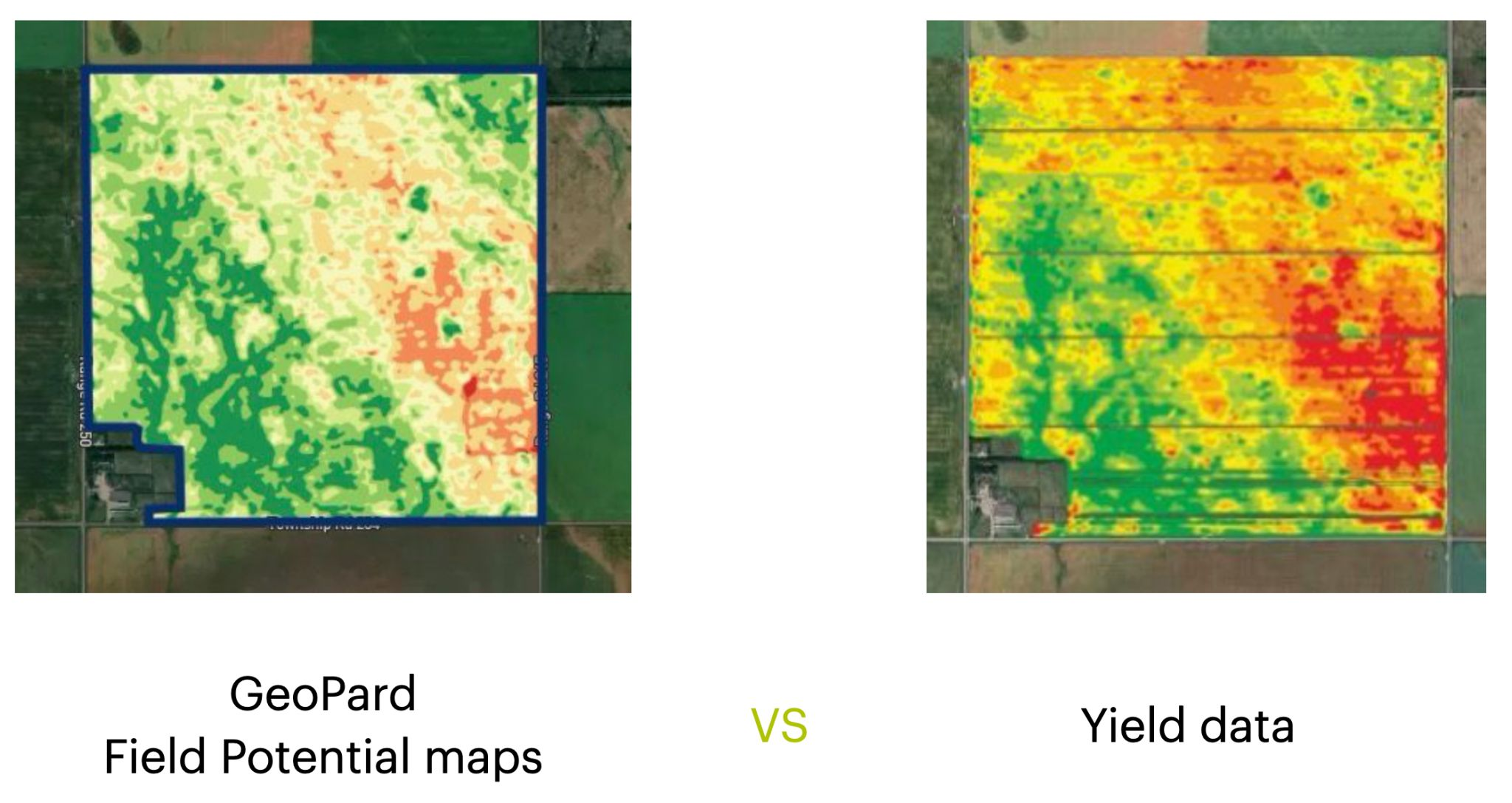
3. Kaugseire: Satelliidi- ja droonifotod võivad paljastada tihenemise sümptomeid. Aeglase kasvu, enneaegse vananemise või kõrgenenud võra temperatuuri (mis viitab taimede stressile) korral on sageli tegemist piiratud juurtega tihenenud pinnases. Ajaseeria piltide analüüsimine, eriti hooaja alguses, aitab tuvastada kroonilisi probleemseid piirkondi.
Kaasaegsed analüütilised platvormid nagu Solvi, Sentera või John Deere'i See & Spray Premium suudavad töödelda aegridade kujutisi, et tuvastada püsivaid probleemseid tsoone, mis on tugevas korrelatsioonis mulla tihenemisega. 2024. aastal ajakirjas “Journal of Precision Agriculture” avaldatud uuring näitas, et kolme aasta droonidega kogutud NDVI-andmete kombineerimine tuvastas õigesti 87% mõõduka kuni tugeva tihenemise tsooni, mida kinnitati maapealse täpsusega.
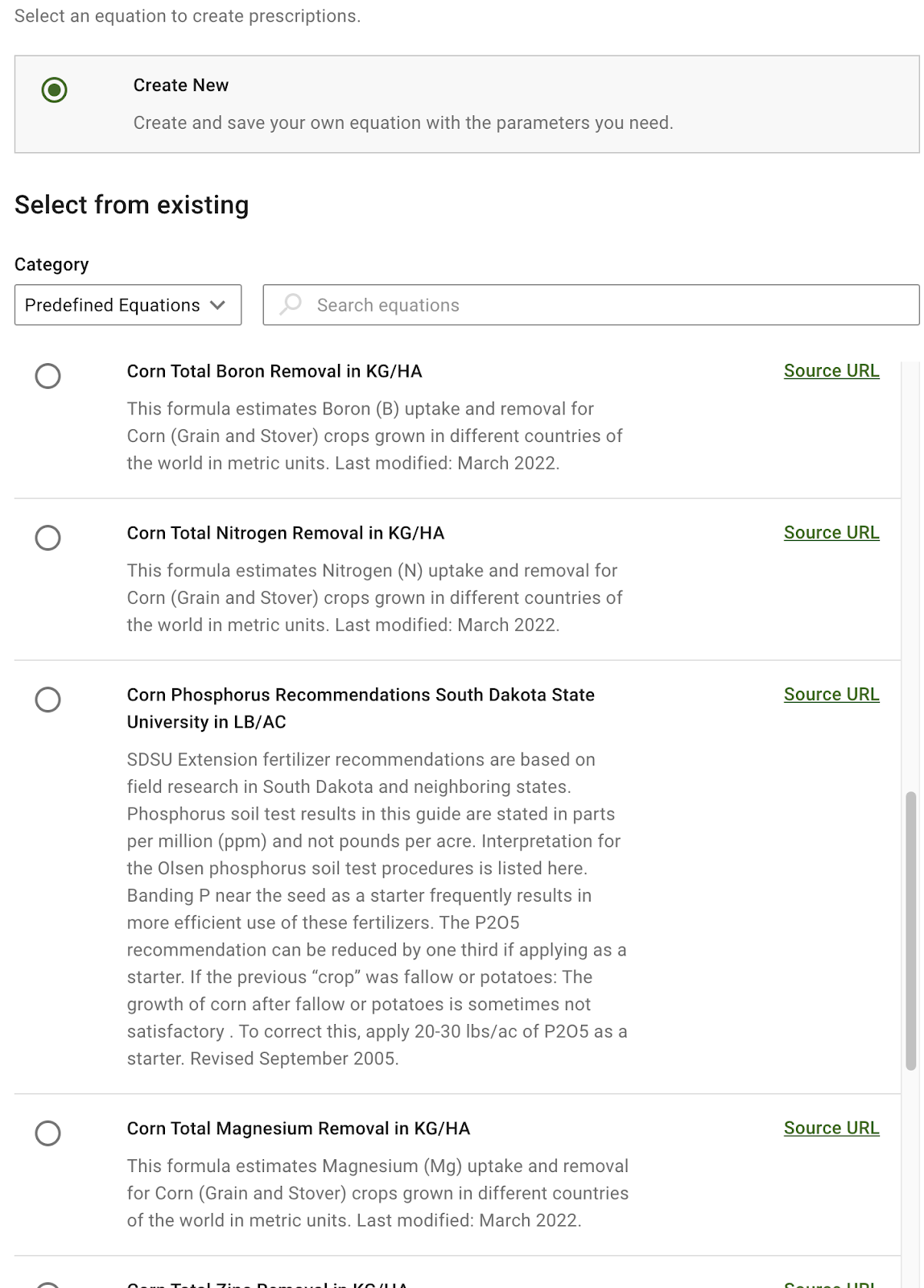
4. Saagikuse andmed vahendajana: Ajaloolised saagikaardid on väärtuslik ja hõlpsasti kättesaadav vihjete allikas. Püsivalt madala saagikusega laigud, eriti piisava sademete hulgaga aastatel, on sageli põhjustatud diagnoosimata aluspinnase tihenemisest. Need saagikaartidel olevad “krooniliselt ebapiisavalt toimivad” kohad on suurepärased lähtepunktid sihipäraseks tihenemise uurimiseks. Koos muude andmetega aitab saagikuse ajalugu eristada tihenemise mõjusid toitainete puudusest või haigustest.
B. Pinnase tihendamise ettekirjutuste kaardi koostamine
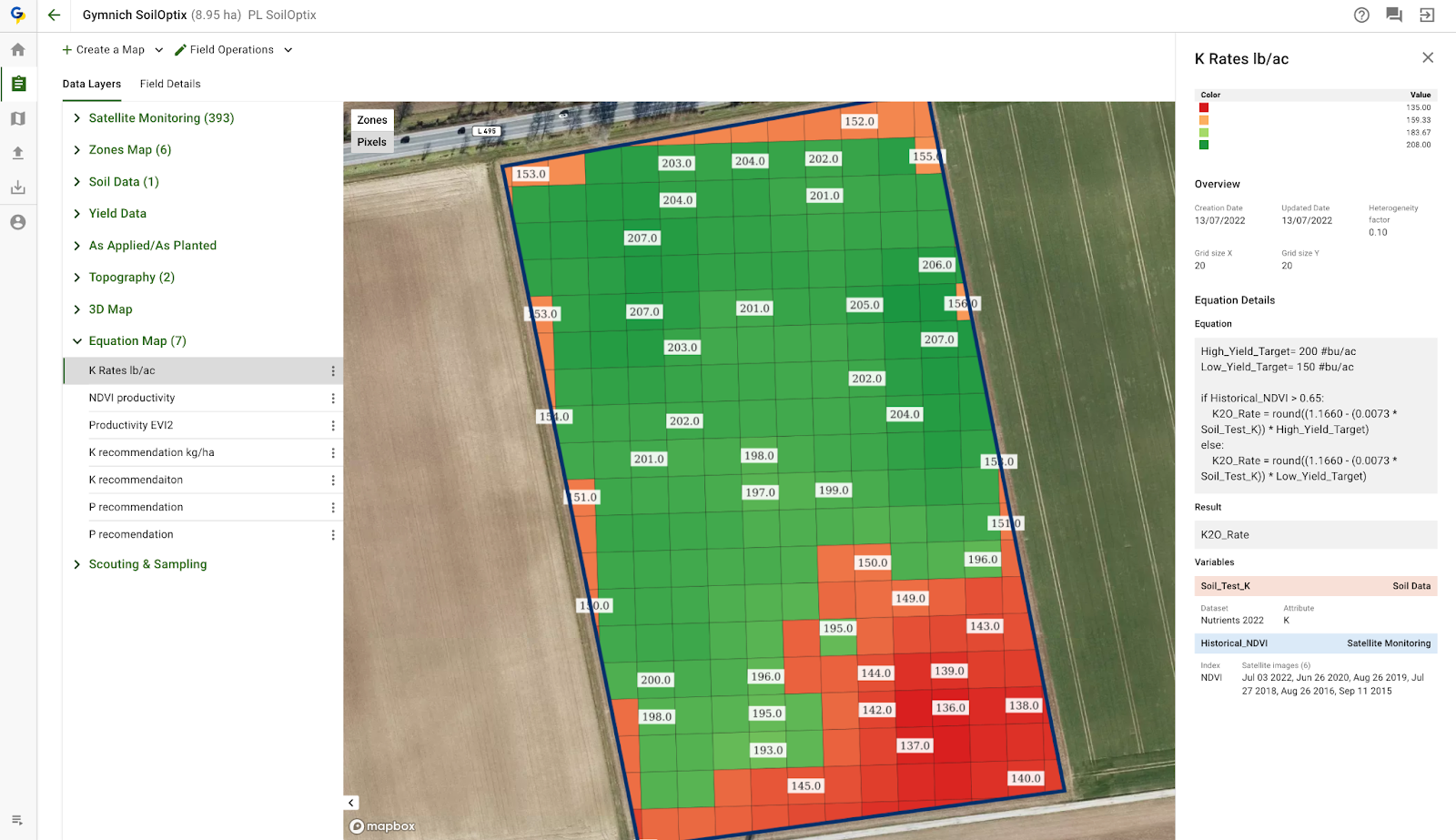
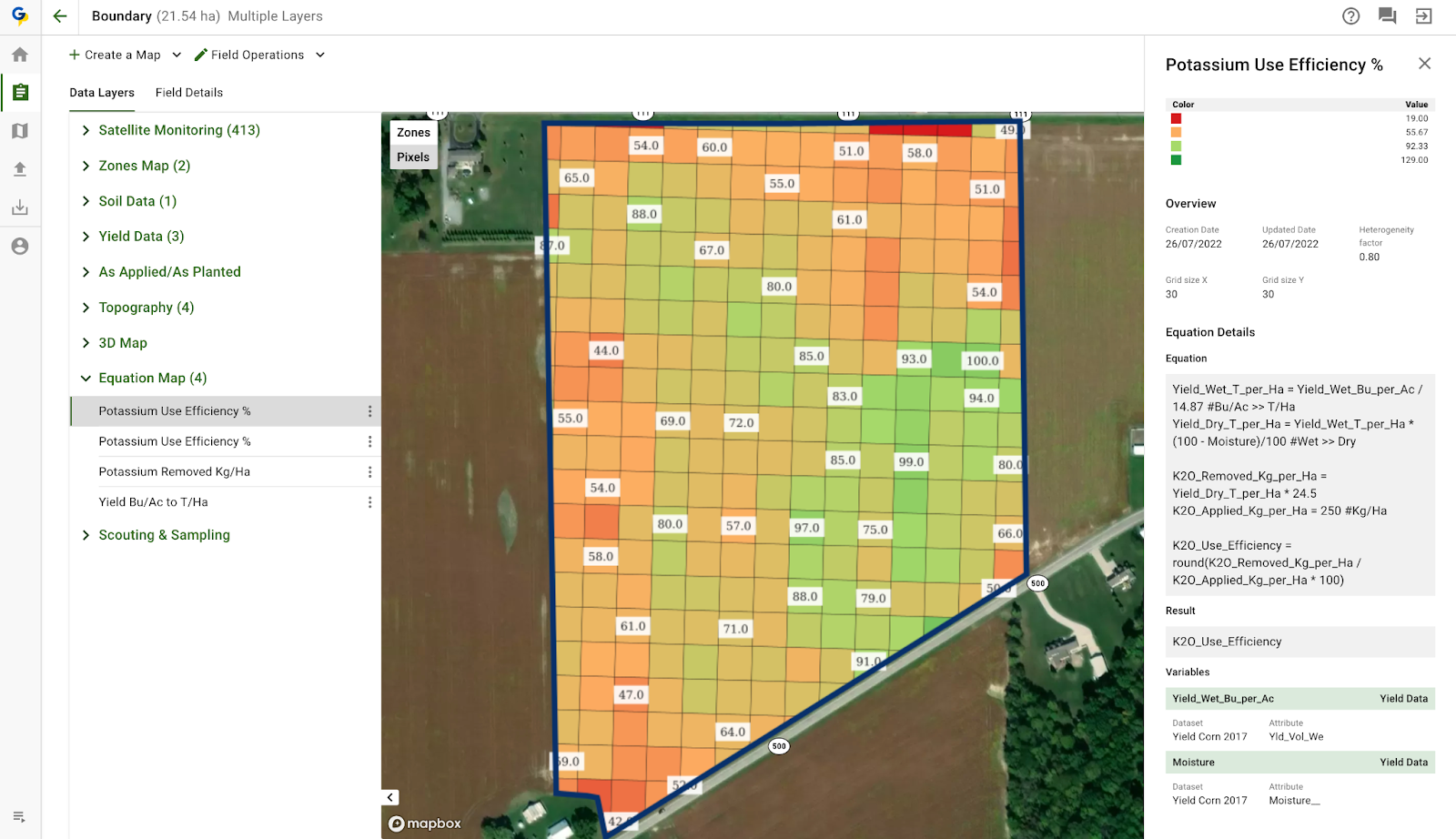
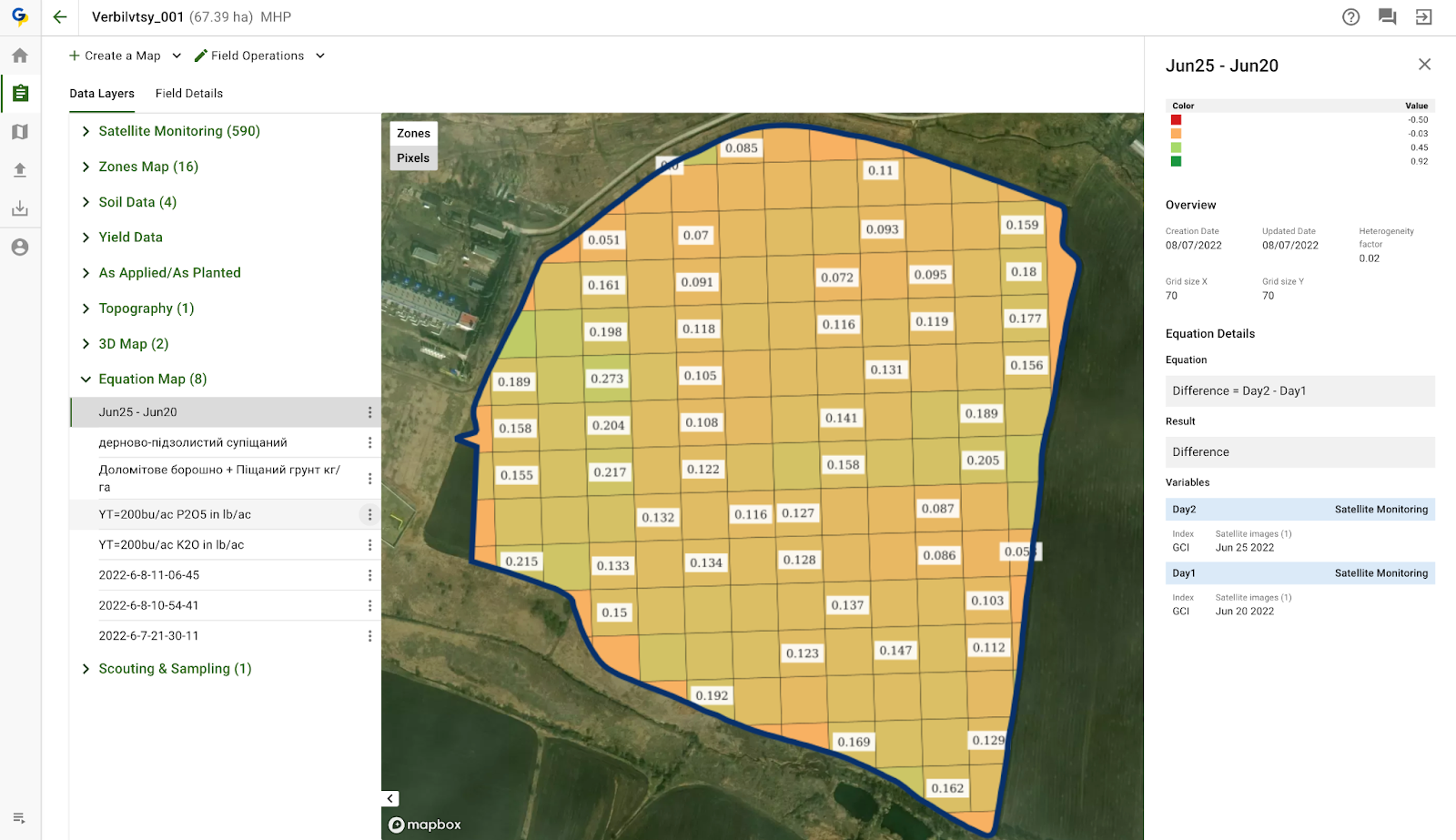
Üleminek toorandmetelt tegutsemiskõlblikele mullaharimisjuhistele nõuab keerukat andmete fusiooni ja agronoomilist tõlgendamist. See protsess toimub tavaliselt põllumajanduslikes GIS-tarkvaraplatvormides nagu Geopard, ArcGIS Agribot või pilvepõhistes süsteemides nagu Climate FieldView või Granular. Kõige usaldusväärsemad juhiskaardid saadakse mitme üksteist täiendava andmekihi integreerimisel:
- EMI või penetromeetri uuringu esmane kiht.
- Konteksti jaoks ajaloolised saagikaardi andmed.
- Mullatüübi kaart tekstuuripõhiste elektrilise settimise muutuste eristamiseks tihenemisepõhistest muutustest.
- Topograafilised andmed, kuna madalamad maastikupositsioonid on tihenemisele vastuvõtlikumad.
Kasutades neid integreeritud andmeid, jagatakse põld eraldi haldustsoonideks. Lihtne kolmetsooniline süsteem võiks olla:
- Tsoon 1: Harimata alad (paljudel põldudel 30-50%): Iseloomulik on madal läbitungimistakistus (<300 psi igal sügavusel), hea drenaaž ja stabiilne struktuur. Neid alasid mulla tervise ja orgaanilise aine kaitsmiseks ei harita üldse.
- Tsoon 2: Madala harimise tsoonid (Põldude 30–40%): Mõõdukas pinna tihenemine (300–600 psi ülemise 6 tolli kihis), kuid mõistlikud aluspinnase tingimused. Mõeldud vertikaalseks mullaharimiseks, ketastamiseks või madalaks kultiveerimiseks (3–6 tolli), et leevendada pinnakooriku teket, säilitades samal ajal aluspinnase struktuuri.
- Tsoon 3: Sügava sekkumise tsoonid (Põldude 10-30%): Ilmneb tugev aluspinnase tihenemine (>600 psi 8–16 tolli sügavusel), sageli nähtavate adrapõhjade või liikluskihtidega. Mõeldud sügavaks kobestamiseks, aluspinnase kobestamiseks või paraploweerimiseks (8–18 tolli), et purustada tihendatud kihte ja taastada vertikaalne poorsus.

Kriitiline kaalutlus on mulla niiskus. Täpsuse tagamiseks tuleb kõik tihenemisnäidud võtta ajal, mil muld on peaaegu põllu läbilaskevõimega (niiske, kuid mitte küllastunud). Andmeid tuleks alati igas kahtlustatavas tsoonis käsitsi penetromeetri kontrollidega valideerida. Täpsete ja võrreldavate andmete saamiseks tuleks mõõtmisi teha ajal, mil muld on peaaegu põllu läbilaskevõimega (niiskuseseisund pärast vaba drenaaži toimumist, kuid enne olulist kuivamist). Paljud juhtivad konsultandid soovitavad nüüdseks “kahe aastaaja” mõõtmist – kaardistamist nii kevadel (tavaliselt niiskemal ajal) kui ka sügisel (tavaliselt kuivemal ajal), et saada täielikum arusaam sellest, kuidas tihenemine erinevates tingimustes avaldub.
Teostus: muutuva külvikiirusega mullaharimistehnoloogia
Kui valideeritud retseptikaart on käes, hõlmab järgmine etapp füüsilist rakendamist – digitaalsete retseptide teisendamist täpseteks mehaanilisteks toiminguteks kogu maastikul. See nõuab spetsiaalseid seadmesüsteeme, mis ühendavad vastupidavad mullaharimisseadmed keeruka juhtimistehnoloogiaga.
A. Riistvara: muutuva mullaharimise “kuidas”
Muutuva sügavusega mullaharimine: See on kõige levinum rakendus. Juhtivad tootjad nagu John Deere (oma ExactEmerge platvormiga, mis on kohandatud mullaharimiseks), Case IH (Early Riser süsteem), Unverferth (Zone Commander) ja DuroTech (Intellivator süsteem) pakuvad haakeseadmeid, mille iga vars on paigaldatud traktori hüdrosüsteemi juhitavale hüdrosilindrile. Kui traktor liigub üle põllu, tõstab või langetab kabiinisisene kontroller automaatselt iga varre selle täpse asukoha jaoks ettekirjutuskaardil määratud sügavusele.
- 6 tolli kus tihendus on madal,
- 10–12 tolli kus on mõõdukas tihenemine,
- 14+ tolli kus aluspinnas kõva kiht piirab juurte kasvu.
Praktikas võib see tähendada, et tihendamata aladel pikenevad varred automaatselt 15 cm pikkuseks, mis mõõdukalt tihendatud alale sisenedes pikeneb automaatselt 25 cm-ni ja seejärel kõva pinnasega aladel 40 cm-ni – kõik sujuvalt ühe töökäiguga. Täiustatud süsteemides on kasutusel “profiilipõhine” juhtimine, mis mitte ainult ei määra maksimaalset sügavust, vaid juhib ka sügavuskõverat vastavalt konkreetsetele kõva pinnase omadustele.
Muutuva intensiivsusega mullaharimine: Mõned süsteemid ei piirdu ainult sügavusega. Need võivad muuta mullaharimise agressiivsust. See võib hõlmata üksikute varsridade automaatset sisse- või väljalülitamist või erinevat tüüpi tööriistade vahel vahetamist (nt sügavlõikevõrest täislaiuses harjani) olenevalt tsoonist.

Kõige arenenumad süsteemid, nagu Väderstadi adaptiivne süsteem või mitmete Euroopa tootjate progressiivse mullaharimise kontseptsioon, suudavad ettekirjutuse põhjal automaatselt reguleerida rünnakunurka, vibratsiooni sagedust või isegi vahetada täiesti erinevat tüüpi tööriistade vahel (nt pöördadralt mittepöördadrale pinnase all oleva kobestajale). Kuigi Põhja-Ameerikas on need süsteemid vähem levinud, esindavad need mullaharimise täpsuse tipptaset.
B. Tarkvara ja juhtimine: operatsiooni “aju”
Süsteemi juhitakse traktori kabiinist. Retseptikaart laaditakse farmihaldustarkvarasse (nt John Deere Operations Center, CNH AFS või Trimble Ag Software) kabiinisisesele ekraanile. Kasutades täpse positsioneerimise jaoks ülitäpse RTK-GPS-signaali, teab kontroller traktori asukohta tollide täpsusega. Haakeseade ja traktor suhtlevad ISO 11783 (ISOBUS) protokolli kaudu, mis on universaalne põllumajanduselektroonika “ühenda ja kasuta” keel. Töövoog on lihtne ja see integreeritud süsteem tagab täpsuse ning vähendab juhi väsimust ja oletusi:
1. Operatsioonieelne planeerimine: Agronoom või põllumees vormistab retseptikaardi, tagades, et tsoonid on loogiliselt määratletud ja sügavuse muutuste vahel on sobivad puhverribad, et vältida liigset haakeseadmete tsüklit.
2. Seadmete seadistamine ja kalibreerimine: Tööseade kalibreeritakse – sügavusandurid kontrollitakse, hüdraulika reageerimisajad testitakse ja süsteem läbib katsetsükleid, et tagada varte õige reageerimine sügavuskäsklustele.
3. Väljaku täitmine: Operaator valib lihtsalt ettekirjutuskaardi, kinnitab haakeriista ühenduse ja alustab põllutööd. Süsteem teeb kõik sügavuse seadistused automaatselt. Operaator jälgib süsteemi jõudlust, jälgides varre õiget reageerimist ja tehes väikeseid kiiruse seadistusi, et optimeerida mulla pragunemist erinevates tingimustes.
4. Dokumentatsioon ja rakenduspõhine kaardistamine: Töö edenedes loob süsteem detailse kaardi, mis näitab täpselt, kui sügavalt igas põllu punktis külvati. See dokumentatsioon on ülioluline efektiivsuse hindamiseks ja edasise majandamise planeerimiseks.
Kuidas GeoPard Agriculture võimaldab mulla tihendamiseks muutuva määraga harimist
Mulla tihenemine on üks peamisi põllukultuuride tootlikkuse piirajaid, mis mõjutab juurte arengut, vee imbumist ja toitainete omastamist. GeoPard Agriculture lahendab selle probleemi, võimaldades andmepõhist muutuva määraga (VR) mullaharimist, mis põhineb mõõdetud mulla tihenemisel mitmel sügavusel. GeoPardi VR-i mullaharimise töövoog algab mulla tihendamise andmestiku (või samaväärsete andmete) kogumisega põllult mitmel sügavusel.
See detailne teave pinnase all võimaldab kasvatajatel ja agronoomidel täpselt mõista, kus ja kui sügaval mulla tihenemine toimub, selle asemel, et tugineda eeldustele või ühtsetele harimisstrateegiatele. GeoPardi abil teisendatakse need andmed sujuvalt täpseteks VR-harimisrakendusteks, tagades, et harimissügavust reguleeritakse ainult vajadusel.
1. Ühe põllu VR-harimisrakendused
GeoPard pakub individuaalsete põldude jaoks interaktiivset mitmekeelset töövoogu, mis juhendab kasutajaid samm-sammult VR-harimiskaardi loomisel. Analüüsides mulla tihenemise väärtusi teatud sügavustel, genereerib GeoPard automaatselt ettekirjutused, mis optimeerivad harimissügavust kogu põllul, vähendades kütusekulu, seadmete kulumist ja mulla häirimist.

2. Mitme põllu VR-harimiskaartide partiipõhine koondamine
GeoPard toetab ka partiitöötlust, mis lihtsustab VR-harimiskaartide loomist mitme põllu jaoks korraga. Vaid mõne klõpsuga saavad kasutajad luua järjepidevaid ja skaleeritavaid VR-harimisjuhiseid kogu tegevuse ulatuses – ideaalne suurtele taludele, teenusepakkujatele ja agronoomiameeskondadele, kes haldavad mitut asukohta.

3. Nutikas mullaharimissügavuse arvutamine kohandatud võrranditega
GeoPardi peamine tugevus on selle kohandatud võrrandite kogu, mis võimaldab kasutajatel määrata, kuidas harimissügavus reageerib mulla tihenemise väärtustele. Näiteks saab harimissügavust arvutada 25 cm tihenemise mõõtmise põhjal, kasutades lihtsat ja läbipaistvat reeglit:
kui rõhk < 15:
mulla_sügavus = 25
elif rõhk < 21:
mulla_sügavus = 27
muu:
mulla_sügavus = 30
Seda võrrandit – või selle mis tahes variatsiooni – saab GeoPardis salvestada ja taaskasutada, tagades järjepideva otsuste tegemise, jäädes samal ajal täielikult kohandatavaks kohalike mullatingimuste, seadmete ja agronoomiliste strateegiate järgi. Mulla tihendamise andmete integreerimisega muutuva külvimääraga tehnoloogiaga aitab GeoPard Agriculture kasvatajatel:
- Vähendage tarbetut sügavharimist
- Parandada mulla struktuuri ja juurte arengut
- Madalamad kütuse- ja tegevuskulud
- Kaitske mulla tervist ja pikaajalist tootlikkust
Eelised: miks seda süsteemi rakendada?
Tihendamisel põhineva VRT kasutuselevõtt pakub mõõdetavaid eeliseid põllumajandusliku tootlikkuse mitmes dimensioonis. Need eelised aja jooksul kuhjuvad, luues nn. “kasutamise suureneva tulususe”.”
Agronoomilised ja keskkonnaalased eelised:
1. Parem mulla tervis: Häiringute minimeerimine mittetihendatud tsoonides kaitseb mulla orgaanilist ainet, mikroobikooslusi ja vihmausside elupaiku. See suurendab pikaajalist vastupidavust. 2024. aasta uuringus “Mullabioloogia ja biokeemia”, milles võrreldi VRT-d ühtlase harimisega, leiti, et mükoriisseente koloniseerimine maisi juurtel oli harimata VRT-tsoonides 40–60% suurem kui haritud aladel, millega kaasnes vastavalt fosfori omastamise efektiivsuse paranemine.
2. Vähenenud erosioon: Jättes ligikaudu 30–501 TP3T põlluala puutumata ja pinnajääkidega puutumata, vähendab VRT oluliselt erosiooniriski. Purdue ülikooli välikatsed (2022–2024) näitasid, et VRT-ga majandatud põllud imasid vihma 2–3 korda kiiremini kui ühtlaselt haritud põllud 1-tollise tunnis simuleeritud vihmasadude ajal. See vähendab pinna äravoolu, vähendab erosiooni ja suurendab taimedele kättesaadavat vett keskmiselt 0,8–1,2 tolli võrra kasvuperioodi kohta – mis on paljudes piirkondades samaväärne tasuta niisutusega.
Lisaks hindavad USDA loodusvarade kaitse teenistuse mudelid, et nõuetekohaselt rakendatud VRT võib vähendada mulla kadu 35–55% võrra võrreldes täispõllu sügavharimisega, millega kaasneb vastav fosfori äravoolu vähenemine 40–60% võrra.

3. Optimeeritud juuretsoonid: Tihenduse korrigeerimine ainult seal, kus see esineb, võimaldab ühtlast juurte uurimist ja vee imbumist, mis omakorda tagab ühtlasema põllukultuuride tärkamise ja arengu. Illinoisi ülikooli uuring (2023) näitas, et maisi juured ulatusid VRT-ga majandatud tsoonides 8–12 tolli sügavamale kui ühtlaselt haritud põldudel, millega kaasnes vastavalt põuakindluse paranemine.
Majanduslikud eelised:
1. Otsese sisendi kokkuhoid: Kõige vahetum majanduslik kasu tuleb sisendkulu vähenemisest. Põllu ainult selle osa sügavharimisega, mis seda tegelikult vajab, säästavad põllumehed märkimisväärselt:
- Kütusekulu: Mitmed Kesk-Lääne piirkonna uuringud (Iowa Osariigi Ülikool, 2023; Ohio Osariigi Ülikool, 2024) dokumenteerivad 25–45% kütusesäästu esmase mullaharimise pealt, mis tähendab $4–8 otsest kokkuhoidu aakri kohta.
- Tööjõunõuded: Väiksem mullaharimise intensiivsus ja kaetud pindala vähendab tööaega 20–351 TP3 T võrra.
- Seadmete hooldus: Lühemad töötundide arvud ja väiksem koormus seadmekomponentidele vähendavad remondi- ja hoolduskulusid hinnanguliselt 15–251 TP3 tonni aastas.
2. Saagikuse optimeerimine: Kuigi ebavajaliku mullaharimise vältimine säilitab saagipotentsiaali heades piirkondades, suurendab probleemsetes piirkondades tihenemise käsitlemine tavaliselt saagikust. Precision Agriculture Associationi (2024) koostatud uuring näitab sihipärase sügava mullaharimise järel järjepidevat saagikuse paranemist 8–15% võrra eelnevalt tihendatud tsoonides. Tüüpilise Kesk-Lääne maisipõllu puhul, kus tihenemise probleemne ala on 20%, tähendab see põllu üldise saagikuse suurenemist 1,6–3,0% võrra. $5,00/buššeli maisi puhul tähendab see $12–22 lisatulu aakri kohta.
Purdue ülikooli laiendusteenistuse 2024. aasta uuring näitas, et tihendatud tsoonide sihipärane mullaharimine suurendas maisisaaki nendes tsoonides keskmiselt 12–18 bušeli võrra aakri kohta, samas kui ebavajaliku mullaharimise vältimine heades piirkondades säilitas nende saagipotentsiaali.
3. Investeeringutasuvus (ROI): Kuigi andurite ja ühilduva VRT-seadme esialgne maksumus võib ulatuda $20 000 kuni $80 000 dollarini, võib tasuvusaeg olla lühike. 1000-aakrise maisi- ja sojaoafarmi puhul võib aastane kütuse- ja tööjõusääst $5000–$8000 dollarit koos konservatiivse saagikuse suurenemisega 2–3% võrra tänu paremale tihendamise haldamisele tuua investeeringu tasuvuse 3–5 aasta jooksul. Investeering muudab seadmed ka tulevikukindlaks andmepõhise põllumajandusajastu jaoks.
Väljakutsed ja praktilised kaalutlused
Selle tehnoloogia kasutuselevõtt pole ilma takistusteta.
Eelnev investeering: Andurite, ühilduvate töövahendite ja ülitäpse RTK-GPS-juhtimise hind on märkimisväärne ja võib väiksematele ettevõtetele takistuseks olla. Selliste piirkondade nagu Red River Valley põllumajandusühistud on edukalt koondanud ressursse, et osta liikmetele kasutamiseks VRT-seadmeid.
Andmete keerukus: Andurite toorandmete täpseks ja rakendatavaks retseptikaardiks muutmine nõuab agronoomilist oskusteavet. Põllumajandustootjad võivad vajada koostööd agronoomide või konsultantidega. Õppimiskõver on reaalne, kuid hallatav. Enamik edukaid kasutuselevõtjaid rõhutab esimesel aastal ühe demonstratsioonipõlluga alustamist, teisel aastal laiendamist 20–301 TP3 t-ni ja täielikku rakendamist kolmandaks või neljandaks aastaks.
Olulised ajastuse kaalutlused: Mulla niiskus harimise ajal on VRT puhul vaieldamatult olulisem kui ühtlane harimine. Kui muld on liiga märg, põhjustab tihendatud tsoonide sügavharimine pigem laialivalgumist kui pragunemist. Liiga kuiva pinnase korral on vaja liigset energiat ja muld võib peenestuda. Optimaalne niiskusaken – tavaliselt siis, kui muld on põllu taluvuspiiril või veidi alla selle – võib olla kitsas. Täiustatud toimingud kasutavad optimaalsete harimisakende kindlakstegemiseks mulla niiskuseandureid ja prognoose, mõnikord töötades öösel või ebatavalistel aegadel, et saavutada niiskuse magus punkt.
Korrigeeriva mullaharimise piirangud: Võib-olla kõige olulisem kontseptuaalne arusaam on see, et tihendamisel kasutatav VRT käsitleb sümptomeid. Kõige keerukamad süsteemid esindavad siiski pigem korrigeerivat kui ennetavat majandamist. Tõeliselt jätkusuutlik pinnase majandamine nõuab VRT integreerimist järgmisega:
- Kontrollitud liikluspõllundus (CTF): Rattaga liikluse püsiv piiramine kindlatele sõiduradadele, vähendades oluliselt tulevast tihenemist.
- Katte kärpimine: Mulla struktuuri ja orgaanilise aine sisalduse suurendamine tihenemise vastu.
- Täiustatud saagikoristuslogistika: Teljekoormuste vähendamine ja märgades tingimustes põllutööde vältimine.
- Orgaanilise aine käitlemine: “Bioloogilise liimi” loomine, mis aitab mullal tihenemisele vastu panna.
Põllumajandustootjad, kes kasutavad VRT-d osana terviklikust mulla tervise süsteemist, leiavad tavaliselt, et nad saavad aja jooksul vähendada sügava sekkumise sagedust, kuna mulla üldine vastupidavus paraneb.
Tärkavate tehnoloogiliste suundumuste tulevik
Tihendamisel põhineva mullaharimise tulevik on intelligentne ja integreeritud. Uute trendide hulka kuulub reaalajas töötavate tihendusandurite ühendamine tööseadmetega, mis reguleerivad sügavust koheselt – luues tõelise “tunneta ja tegutse” süsteemi ühe töökäiguga.
Reaalajas integreeritud tuvastamine ja reageerimine: VRT püha graal sulgeb reaalajas andurite ja toimingute vahelise ahela. Praegu välikatsetustes olevad prototüüpsüsteemid ühendavad maapinnalähedase radari või pideva penetromeetria koheselt reguleeritavate tööseadmetega. Need “tunneta ja tegutse” süsteemid loovad tihenduskaardid esimesel läbimisel ja teostavad mullaharimise teisel läbimisel või mõnes täiustatud prototüübis teevad mõlemat samaaegselt. Ettevõtted nagu AgDNA ja mõned Euroopa tootjad on demonstreerinud toimivaid süsteeme, mida saaks turustada 3-5 aasta jooksul.
Tehisintellekti ja masinõppe optimeerimine: Tehisintellekt muudab retseptide väljatöötamist. Selle asemel, et toetuda üksnes andmekihtide inimlikule tõlgendusele, suudavad masinõppe algoritmid nüüd tuvastada keerulisi mittelineaarseid seoseid mulla omaduste, ajaloolise majandamise ja tihenemise tulemuste vahel. Süsteemid nagu IBM-i Watson for Agriculture ja mitmed idufirmade platvormid suudavad analüüsida aastakümnete pikkuseid väliandmeid, et ennustada, kus tihenemine tõenäoliselt (taas)tekkib, võimaldades ennetavat, mitte reaktiivset majandamist.
Autonoomsed mullaharimisplatvormid: Autonoomse ja VRT-robotite lähenemine tõotab muuta mullaharimise ökonoomikat ja ajastust. Väikesed ja kerged autonoomsed mullaharimisrobotid võiksid töötada optimaalsetes mulla niiskustingimustes ööpäevaringselt ilma operaatori väsimuseta. Euroopa katsetused selliste ettevõtetega nagu Agrointelli ja FarmDroid on näidanud paljulubavaid tulemusi päikeseenergial töötavate autonoomsete tööriistadega, mis teostavad sihipärast mullaharimist täpselt õige mulla niiskusetaseme juures.
Integratsioon süsinikpõllumajanduse ja ökosüsteemi teenuste turgudega: Süsinikukrediidi turgude küpsedes loovad täpselt dokumenteeritud mullaharimisintensiivsuse vähendamised VRT abil kontrollitavaid süsiniku sidumise väiteid. Varajase kasutuselevõtu andmed näitavad, et VRT võib vähendada mulla süsinikukadu 0,2–0,4 tonni aakri kohta aastas võrreldes täispõllu harimisega. Kui süsinikuturud jõuavad $50–100 tonnini tonni kohta (nagu mitmed analüütikud on 2030. aastaks prognoosinud), võib see VRT väärtuspakkumisele lisada $10–40 aakri kohta ökosüsteemi teenuste makseid.
Kokkuvõte
Kokkuvõtteks võib öelda, et mulla tihenemise andmete põhjal juhitav muutuva määraga mullaharimine kujutab endast põhimõttelist paradigma muutust. See nihutab mullaharimise reaktiivsest ja ühtlasest praktikast proaktiivseks ja ettekirjutustel põhinevaks strateegiaks. See tunnistab maa loomupärast varieeruvust ja käsitleb iga ruutjalga vastavalt selle konkreetsele vajadusele. Selle lähenemisviisi omaksvõtmisega positsioneerivad põllumehed end kohaspetsiifilise säästva põllumajanduse esirinnas, tehes strateegilisi otsuseid, mis suurendavad nii nende ettevõtte kasumlikkust kui ka nende kõige väärtuslikuma vara – mulla – pikaajalist jätkusuutlikkust. See on võimas samm mitte ainult täpsema, vaid ka intelligentsema põllumajanduse suunas.















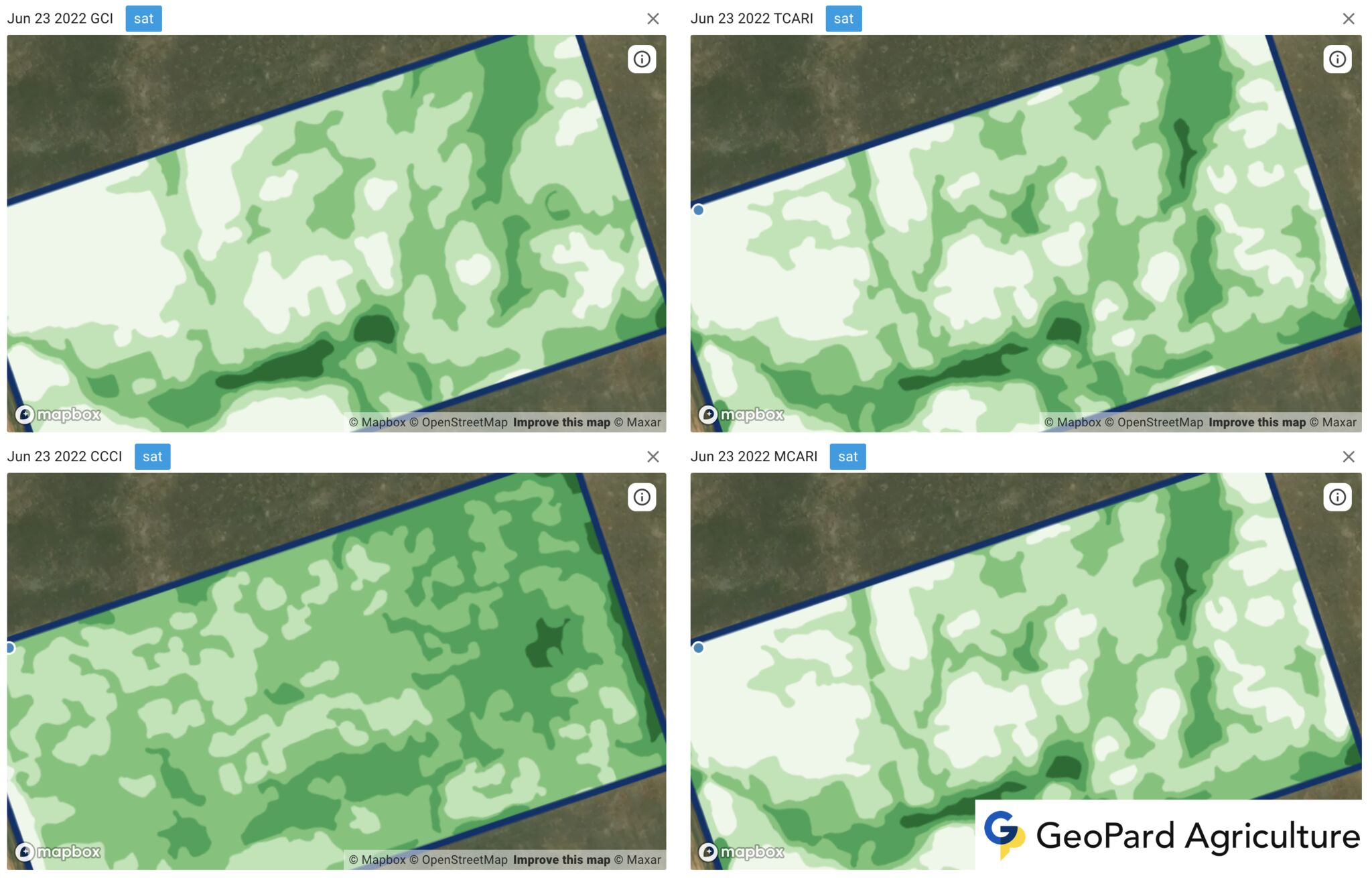
 Võsa klorofülli sisalduse indeks (CCCI) vs modifitseeritud klorofülli neeldumise suhte indeks (MCARI) vs transformeeritud klorofülli neeldumise peegeldusindeks (TCARI) vs suhe MCARI/OSAVI
Võsa klorofülli sisalduse indeks (CCCI) vs modifitseeritud klorofülli neeldumise suhte indeks (MCARI) vs transformeeritud klorofülli neeldumise peegeldusindeks (TCARI) vs suhe MCARI/OSAVI









