Os Veículos Aéreos Não Tripulados (VANTs), ou drones, estão transformando a agricultura moderna ao fornecerem imagens aéreas rápidas das plantações. Eles são usados para monitorar a saúde das culturas, o estágio de crescimento, pragas, ervas daninhas e para estimar a produtividade. Por exemplo, a China já possui mais de 250.000 drones agrícolas em operação, e na Tailândia, cerca de 301.000 toneladas de terras agrícolas foram cobertas por pulverização ou monitoramento por drones até 2023. Esses VANTs tornam a agricultura mais eficiente, detectando rapidamente problemas (como infestações de pragas ou estresse hídrico) que podem passar despercebidos no solo.
No entanto, os pequenos UAVs têm capacidade computacional embarcada e autonomia de bateria muito limitadas. Executar algoritmos complexos de visão computacional de IA neles em tempo real é, portanto, um desafio. Os modelos tradicionais de detecção de objetos leves (como os detectores baseados em Tiny YOLO ou MobileNet) só conseguem atender parcialmente a essas necessidades: muitas vezes sacrificam a precisão ou a velocidade e exigem ajustes manuais significativos. Essa lacuna motiva a Busca de Arquitetura Neural Sensível à Implantação (NAS): um método de projeto automatizado que adapta modelos de aprendizado profundo aos requisitos exatos de UAVs implantados em campo.
A agricultura de precisão moderna utiliza drones para inspecionar campos e monitorar as condições das plantações. Ao sobrevoar grandes áreas, os drones podem coletar imagens de alta resolução de plantas, solo e padrões do campo. Essas imagens são processadas por algoritmos de visão computacional que detectam ervas daninhas entre as plantações, estimam a produtividade (por exemplo, contando frutos ou espigas) ou identificam sinais precoces de doenças ou deficiência de nutrientes. Por exemplo, os drones permitem a aplicação direcionada de herbicidas em áreas infestadas por ervas daninhas, reduzindo o uso de produtos químicos e os custos.
No entanto, os pequenos computadores de bordo dos drones (frequentemente limitados a poucos watts de potência) têm dificuldades para executar grandes redes neurais em velocidade de voo. Isso dificulta a análise em tempo real: se um drone detecta um problema, precisa reagir rapidamente ou registrar os dados antes que a bateria acabe. Os detectores leves atuais (por exemplo, YOLOv8 nano, YOLO-tiny, MobileNets) são projetados manualmente e geralmente envolvem concessões: reduzir o tamanho do modelo aumenta sua velocidade, mas pode prejudicar a precisão.
Consequentemente, existe uma grande necessidade de métodos que encontrem automaticamente o melhor modelo possível, considerando as limitações do VANT (Veículo Aéreo Não Tripulado). O NAS (Sistema de Redes Neurais) com reconhecimento de implantação atende a essa necessidade, buscando arquiteturas de redes neurais que otimizem conjuntamente a precisão da detecção e o uso de recursos (latência, energia, memória) em condições reais de operação do VANT. Essa abordagem pode fornecer modelos especializados que funcionam de forma eficiente no hardware do drone, mantendo alta precisão para tarefas de monitoramento de plantações.
Requisitos de detecção de objetos por drones no monitoramento de culturas agrícolas
Os drones agrícolas executam uma série de tarefas de detecção visual, cada uma com suas próprias exigências:
1. Detecção de estresse e saúde das culturas: Drones utilizam câmeras RGB, térmicas ou multiespectrais para identificar plantas estressadas, deficiências nutricionais ou sintomas de doenças. Algoritmos em tempo real podem mapear a variabilidade do campo, orientando a irrigação ou a fertilização. A detecção precisa dos sinais de estresse nas plantas permite intervenções oportunas para salvar a produção.
2. Identificação de ervas daninhas: A detecção de ervas daninhas em meio às plantações permite que os agricultores pulverizem apenas as plantas indesejadas, economizando herbicida. Por exemplo, um estudo em plantações de algodão utilizou imagens de drones com um detector baseado no YOLOv7 e alcançou uma precisão de cerca de 83% na separação de ervas daninhas do algodão. No entanto, distinguir ervas daninhas e plantações visualmente semelhantes continua sendo difícil em imagens de campo com muita informação visual.

3. Detecção de pragas e doenças: Os drones podem detectar surtos (como gafanhotos, insetos ou pragas fúngicas) mais cedo do que os humanos a pé. Os drones também auxiliam no mapeamento de zonas infestadas por pragas através de imagens multiespectrais, o que representa uma melhoria em relação ao uso apenas de imagens RGB. A detecção rápida e precisa de pragas é fundamental para prevenir a sua disseminação.
4. Estimativa de rendimento: A contagem aérea de frutas, espigas de grãos ou plantas ajuda a prever os volumes de colheita. Modelos treinados para detectar maçãs, melões ou espigas de trigo em imagens de drones podem acelerar a estimativa de rendimento. Por exemplo, redes neurais em imagens de drones têm sido usadas para contar plantações de melancia e melão.
5. Levantamento topográfico e cartografia: Os drones também criam mapas de campo (topografia, diferenças de solo) que auxiliam no planejamento do cultivo. Embora não seja estritamente detecção de objetos, isso faz parte do monitoramento por drones.
Essas tarefas frequentemente exigem inferência quase em tempo real: um drone sobrevoando campos pode precisar processar quadros de vídeo instantaneamente (vários quadros por segundo) para que decisões de controle (como ajustar a altitude ou ativar um pulverizador) possam ser tomadas imediatamente. Em outros casos, pequenos atrasos (segundos) podem ser aceitáveis se os dados forem registrados e analisados após o pouso.
É importante destacar que a visão dos drones deve lidar com a variabilidade ambiental: luz solar intensa, sombras, desfoque de movimento causado pelo vento, oclusão por folhas sobrepostas ou mudanças de altitude e ângulo. Os tamanhos dos objetos variam (ervas daninhas próximas versus aglomerados de pragas distantes), portanto, os detectores devem gerenciar características em múltiplas escalas.
Por fim, as missões de drones agrícolas envolvem compromissos rigorosos entre precisão, latência e energia. Alta precisão de detecção é necessária para evitar que ervas daninhas ou pragas passem despercebidas, mas executar uma rede neural muito complexa pode consumir a bateria rapidamente. Portanto, um modelo de detecção deve ser rápido e eficiente em termos de energia, sem deixar de ser preciso o suficiente para a tarefa. Esses requisitos rigorosos destacam por que o desenvolvimento de modelos especializados é necessário para drones na agricultura.
Detectores de objetos leves para plataformas UAV
Detectores de objetos leves são redes neurais projetadas especificamente para serem executadas em hardware com recursos limitados. Frequentemente, utilizam arquiteturas de base pequenas (como MobileNet ou ShuffleNet), larguras de camada reduzidas ou designs de pescoço/cabeça simplificados. Por exemplo, os modelos da família YOLO incluem versões "nano" e "tiny" (como YOLOv8n e YOLOv5s) que possuem menos parâmetros e requerem menos operações (FLOPs).
Esses detectores podem operar a dezenas de quadros por segundo em hardware embarcado, como o NVIDIA Jetson Nano ou o Google Coral. Por exemplo, o Ag-YOLO era um detector personalizado baseado em YOLO para plantações de palmeiras que rodava a 36,5 fps em um Intel Neural Compute Stick 2 (usando apenas 1,5 W) e alcançou alta precisão (F1 = 0,9205). Esse modelo utilizou cerca de 12 vezes menos parâmetros que o YOLOv3-Tiny, ao mesmo tempo que dobrou sua velocidade.

Esses exemplos mostram as compensações no projeto de modelos: reduzir o tamanho ou a complexidade de um modelo (por exemplo, menos camadas ou canais) normalmente acelera a inferência e diminui o consumo de energia, mas pode reduzir a precisão. O Ag-YOLO sacrificou parte da capacidade para ganhar velocidade e eficiência, mas ainda manteve uma alta pontuação F1 de 0,92 em sua tarefa.
De forma semelhante, três variantes do YOLOv7 foram comparadas para detecção de ervas daninhas: o YOLOv7 completo alcançou uma precisão de 83%, enquanto uma versão reduzida do YOLOv7-w6 apresentou uma precisão de 63%. Isso ilustra uma limitação de detectores genéricos e leves: modelos otimizados para um ambiente ou tipo de objeto podem apresentar desempenho inferior em outro. Um detector simplificado para maior velocidade pode perder pistas sutis (como ervas daninhas pequenas ou camufladas), comprometendo a robustez em diferentes condições.
Na agricultura, essas redes genéricas e leves podem não ser ideais sem ajustes adicionais. Por exemplo, um modelo YOLOv7 pré-treinado em conjuntos de dados comuns pode não lidar perfeitamente com as texturas e escalas únicas das imagens de plantações. Portanto, há necessidade de otimização da arquitetura do modelo específica para cada tarefa e plataforma. O ajuste manual (alteração de camadas, filtros etc.) para cada novo tipo de drone ou variedade de plantação é trabalhoso. Isso motiva o uso de métodos automatizados — como o NAS com reconhecimento de implantação — para encontrar o melhor equilíbrio entre tamanho, precisão e robustez para uma determinada plataforma de UAV e aplicação agrícola.
Busca de arquitetura neural em sistemas de visão baseados em drones
A Busca de Arquitetura Neural (NAS, na sigla em inglês) é um método automatizado para projetar arquiteturas de redes neurais. Em vez de definir manualmente o número de camadas, filtros e conexões, a NAS usa algoritmos (aprendizado por reforço, métodos evolutivos ou busca baseada em gradiente) para explorar um espaço de projetos possíveis e encontrar aqueles que otimizam um objetivo escolhido (como a precisão).
A NAS já foi aplicada na criação de redes otimizadas para dispositivos móveis. Por exemplo, a MnasNet do Google foi uma NAS pioneira e "sensível à plataforma" que incluiu diretamente a latência real do dispositivo em seu objetivo. A MnasNet mediu o tempo de inferência em um telefone Google Pixel para cada modelo candidato durante a busca e equilibrou a precisão com essa latência medida. O resultado foi uma família de CNNs rápidas e precisas em hardware móvel, superando os modelos MobileNet e NASNet projetados manualmente no ImageNet.
No entanto, abordagens genéricas de NAS, como o MnasNet, focam em tarefas gerais de visão computacional (classificação do ImageNet ou detecção de COCO) e hardware genérico (como telefones celulares). Para o monitoramento de plantações por drones, o problema é mais específico. Buscamos detectores otimizados para classes de objetos específicas (plantas, ervas daninhas, pragas) e adaptados aos sensores e ao perfil de voo do drone. Um NAS padrão que otimize apenas a acurácia ou a latência genérica pode negligenciar nuances como a detecção de objetos pequenos ou restrições de energia.
Além disso, os métodos tradicionais de NAS podem ser computacionalmente muito dispendiosos (frequentemente exigindo dias em grandes clusters de GPUs), o que nem sempre é prático para pesquisadores agrícolas. Portanto, são necessárias estruturas de NAS específicas para a visão com drones. Estas devem incorporar critérios relevantes para drones e ser o mais eficientes possível.
Em todos os casos, a consciência das restrições é crucial: o NAS deve estar ciente das restrições do dispositivo alvo (semelhante ao MnasNet) e das demandas em tempo real das tarefas de voo do UAV. Se a busca for muito lenta ou ignorar o consumo de energia, o modelo resultante pode não funcionar bem em campo.
Na prática, o NAS para visão com drones incluiria latência e consumo de energia do hardware diretamente na métrica de busca. Por exemplo, seria possível medir a taxa de quadros de um detector candidato no próprio computador do drone (como um NVIDIA Jetson) e usar isso como pontuação. Isso contrasta com o uso de indicadores simples como FLOPs, que não capturam a velocidade real.
Dessa forma, o NAS pode descobrir arquiteturas que melhor explorem as capacidades do dispositivo. Em resumo, o NAS oferece uma maneira de projetar detectores para UAVs automaticamente, mas precisa ser adaptado para levar em consideração as tarefas específicas dos UAVs e os requisitos de eficiência.
NAS com reconhecimento de implantação: princípios básicos
O NAS com reconhecimento de implantação amplia o NAS com reconhecimento de hardware ao incluir o contexto de implantação e as restrições ambientais no processo de projeto. Em outras palavras, ele não considera apenas o hardware do drone (velocidade da CPU/GPU, limites de memória, orçamento de energia), mas também o que o UAV realmente encontrará em campo. Isso significa otimizar explicitamente métricas como latência de inferência no dispositivo alvo, consumo de energia e uso de memória, tudo isso buscando alta precisão de detecção.
Por exemplo, durante o NAS, seria possível implantar cada modelo candidato em um Jetson Nano acoplado ao UAV e registrar seu tempo de inferência e consumo de energia no mundo real. Esse feedback empírico ajuda a direcionar a busca para modelos que realmente atendam aos critérios de implantação.
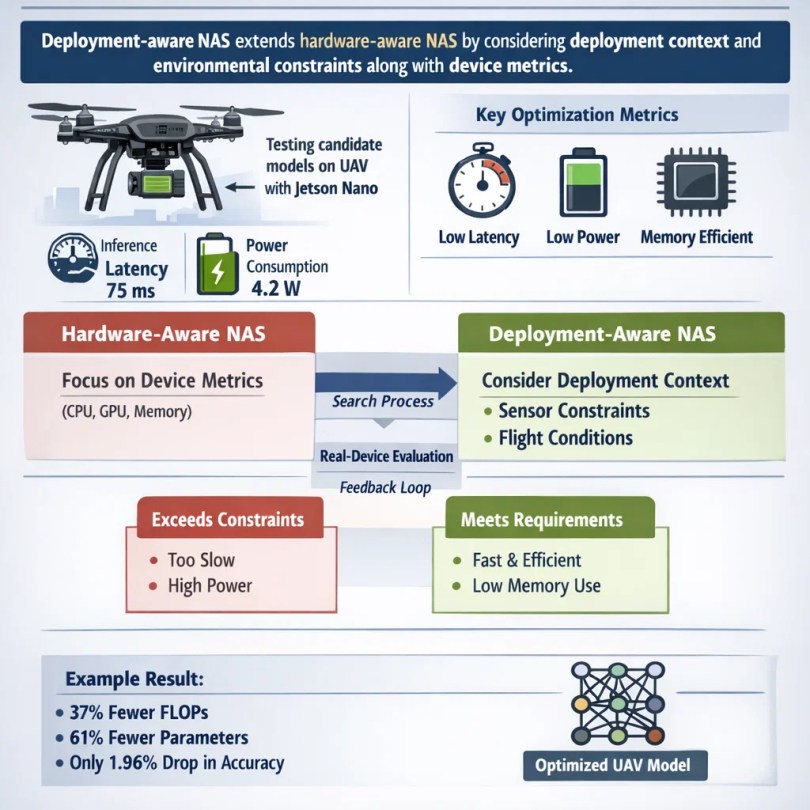
O NAS com reconhecimento de hardware (como o MnasNet) concentra-se em métricas de dispositivos, enquanto o NAS com reconhecimento de implantação vai além: ele pode considerar características de entrada de sensores (por exemplo, resolução de imagem, canais multiespectrais) e metas de latência de aplicativos (quadros por segundo necessários). Pode até incorporar restrições de voo, como memória máxima permitida, ou incluir avaliações sob vibração de vento simulada ou desfoque de movimento.
Um NAS (Sistema de Arquitetura de Drones) com foco em implantação pode penalizar arquiteturas que excedam, por exemplo, um consumo de energia de 5W ou que necessitem de mais memória do que o drone possui. Ao fazer isso, a busca naturalmente se inclina para modelos práticos para a operação em campo do UAV (Veículo Aéreo Não Tripulado). Em essência, um NAS com foco em implantação busca fechar o ciclo entre o projeto do modelo e o uso no mundo real. Em vez de escolher uma arquitetura isoladamente e torcer para que funcione, ele inclui sistematicamente testes com dispositivos reais durante a busca.
Por exemplo, Kerec et al. (2026) usaram uma estrutura semelhante para buscar um detector de UAVs: eles partiram de uma base YOLOv8n, mas incluíram a latência e o consumo de energia do Jetson Nano na busca. O modelo resultante apresentou 37% a menos de GFLOPs e 61% a menos de parâmetros do que o YOLOv8n, com uma queda de apenas 1,96% no mAP. Isso demonstra claramente como as restrições de implantação direcionaram o NAS para uma rede muito mais leve e rápida.
O papel dos sistemas de navegação aérea (NAS) com reconhecimento de implantação no monitoramento da agricultura de precisão.
Um sistema de busca automatizado (NAS) adaptado ao contexto de implantação pode aprimorar significativamente o monitoramento de plantações por drones, ajustando os detectores às condições agrícolas. Por exemplo, uma busca pode priorizar arquiteturas que se destacam na detecção de objetos pequenos e finos (como ervas daninhas estreitas ou mudas finas de milho) ou na distinção entre plantas e o solo. O sistema pode ajustar a profundidade da rede e os campos receptivos à altitude de voo típica: em baixa altitude, os objetos preenchem a imagem e podem exigir detalhes precisos, enquanto em altitudes mais elevadas a rede deve ser eficiente na detecção em pequena escala. Um NAS adaptado ao contexto de implantação pode incorporar esses requisitos em seu espaço de busca.
A velocidade é crucial em campo. Imagine um drone detectando uma infestação de pragas; se o modelo for rápido o suficiente para processar vídeo a, digamos, 30 fps, ele pode alertar o piloto ou acionar uma ação de tratamento imediata. Em testes, um modelo projetado pela NAS apresentou um desempenho 28% mais rápido em um Jetson Nano do que o YOLOv8n padrão, graças à sua arquitetura otimizada. Ele também consumiu 18,5% a menos de energia em modo de execução ONNX, o que significa que o drone pode voar por mais tempo com a mesma bateria. Esses ganhos tornam a tomada de decisões em voo mais viável e prolongam a duração da missão.
A robustez é outro benefício. Como o NAS com reconhecimento de implantação envolve a avaliação real do dispositivo, a busca pode incluir testes em diversas condições. Por exemplo, pode simular baixa luminosidade ou incluir imagens de treinamento do amanhecer e do entardecer, garantindo que o detector final mantenha a precisão sob condições reais de clima e iluminação. O trabalho demonstrou que o detector derivado do NAS generalizou bem: ele foi testado em dois conjuntos de dados de culturas diferentes (espigas de trigo e plântulas de algodão) e apresentou um desempenho sólido em ambos.

Isso sugere que o NAS com reconhecimento de implantação ajudou a encontrar características comuns e úteis para a agricultura, melhorando a generalização para novos campos. No geral, o NAS com reconhecimento de implantação ajuda a equilibrar a precisão com um tempo de voo mais longo. Ao reduzir o processamento computacional, os drones consomem menos energia e podem cobrir uma área maior por carga de bateria, mantendo a detecção confiável de plantações e pragas.
Projeto do espaço de busca para detectores de drones agrícolas
Uma parte importante do NAS (Sistema de Rede Autônoma) com foco em implantação é o espaço de busca – o conjunto de possíveis projetos de rede que ele considera. Para detectores de culturas aéreos não tripulados (UAVs), o espaço de busca pode ser elaborado para incluir arquiteturas promissoras para esse domínio. Os principais componentes incluem:
1. Projeto da estrutura principal: A espinha dorsal é o extrator de características. Para UAVs, pode-se incluir blocos de construção convolucionais leves, como convoluções separáveis em profundidade (como as usadas no MobileNet) ou blocos residuais invertidos. Resíduos invertidos e gargalos lineares (estilo MobileNetV2) são bem conhecidos por sua eficiência em dispositivos móveis. O espaço de busca pode permitir a variação da largura (número de canais) e da profundidade de cada bloco para se adequar ao orçamento computacional do UAV. Módulos de atenção ou inspirados em transformadores também podem ser incluídos, caso o UAV possa suportá-los com baixo consumo de energia.
2. Design do pescoço: Muitos detectores de objetos usam pirâmides de características (FPN) ou redes de agregação de caminhos para combinar características multiescala. A pesquisa poderia explorar FPNs simplificadas ou agregação de características mais leve. Por exemplo, usar um cabeçalho de escala única versus cabeçalhos multiescala poderia ser uma opção. O espaço de busca poderia permitir camadas de pooling ou conexões de salto que ajudam a detectar objetos em diferentes tamanhos.
3. Design da cabeça: A camada de detecção (classificação e regressão de caixa) também pode ser variada. Para drones que observam campos uniformes, uma camada mais simples pode ser suficiente. Mas para detectar pequenas plantas aquáticas, a busca pode incluir camadas convolucionais adicionais ou diferentes esquemas de ancoragem.
4. Operações leves: O espaço de busca pode permitir explicitamente apenas operações de baixo custo. Por exemplo, escolher entre uma convolução 3×3 e uma convolução fatorada 1×3+3×1 mais barata, ou incluir módulos GhostNet. Também pode permitir tamanhos de kernel pequenos ou dimensões reduzidas para limitar a computação. Todas essas escolhas são determinadas pelo hardware. O espaço pode proibir qualquer configuração de camadas que exceda o limite de memória do drone ou o limite de energia esperado.
Ao projetar cuidadosamente esse espaço de busca, o processo NAS é guiado para arquiteturas eficazes e eficientes. O resultado pode ser uma combinação inovadora de blocos não considerada em modelos padrão. O melhor detector encontrado utilizou escolhas de blocos personalizadas que reduziram os GFLOPs em 37% e os parâmetros em 61% em comparação com o YOLOv8n.
Isso foi possível porque o NAS podia combinar elementos de backbone e de cabeçalho, respeitando as limitações do UAV. Em resumo, o foco da busca por detectores para UAVs agrícolas reside em blocos de construção escaláveis e leves, além da capacidade de lidar com múltiplas escalas, tudo dentro dos limites do hardware embarcado.
Objetivos e restrições de otimização
Um sistema de detecção de anomalias (NAS) com foco em implantação deve equilibrar múltiplos objetivos. O objetivo principal geralmente é a precisão da detecção (por exemplo, a Precisão Média, mAP), medida em conjuntos de dados de monitoramento de culturas. Por exemplo, mAP@50 (precisão com 50% de intervalo de confiança) é uma métrica comum. O modelo otimizado para NAS apresentou uma queda de apenas 1,96% em mAP@50 em comparação com o modelo base YOLOv8n, uma perda muito pequena considerando os ganhos obtidos. Precisão e recall (ou pontuação F1) em classes-chave (ervas daninhas, culturas) também são considerados.
Ao mesmo tempo, a latência e o consumo de energia devem ser otimizados. A latência é o tempo de inferência por imagem; para uma GPU integrada, pode ser de 20 a 50 ms ou mais. Menor latência significa taxas de quadros mais altas. O consumo de energia (joules por quadro) é crucial para a autonomia de voo. A quantidade de memória necessária (número de parâmetros, tamanho do modelo) é outra restrição; os modelos devem caber na RAM do dispositivo. Portanto, os sistemas de armazenamento de dados (NAS) geralmente definem uma meta ou penalidade para essas restrições.
Por exemplo, qualquer modelo mais lento que um determinado limite ou acima de um orçamento de parâmetros pode ser rebaixado. Isso transforma efetivamente o NAS em um problema de otimização multiobjetivo: maximizar a precisão e minimizar a latência, o consumo de energia e o tamanho.
Na prática, isso poderia ser feito por uma soma ponderada de objetivos ou por restrições rígidas. Alguns métodos aplicam uma penalidade significativa a qualquer candidato que exceda o limite de potência do UAV. Outros calculam explicitamente uma métrica de energia: os modelos foram testados no ambiente de execução ONNX para medir a “eficiência energética”, e o melhor modelo foi 18,5% mais eficiente em termos de energia do que o YOLOv8n. Este foi um dos objetivos que nortearam a busca.
As compensações encontradas podem ser visualizadas em uma fronteira de Pareto: em uma extremidade, modelos pequenos extremamente rápidos com menor precisão; na outra, modelos grandes e precisos que são muito lentos ou consomem muita energia para um drone. O NAS (Sistema de Navegação Avançada) com foco em implantação busca encontrar um ponto ideal nessa fronteira que corresponda às prioridades reais da missão (por exemplo, uma pequena perda de precisão para um grande ganho de velocidade). Em resumo, o NAS deve considerar as métricas de precisão (mAP, F1) e as restrições de inferência (ms por quadro, joules por quadro, memória) em conjunto. Essa otimização equilibrada é o que torna um modelo verdadeiramente pronto para implantação em UAVs (Veículos Aéreos Não Tripulados).
Treinamento e avaliação em contextos agrícolas realistas
Para que os detectores encontrados pelo NAS funcionem bem, eles devem ser treinados e testados com dados agrícolas realistas. Isso significa usar conjuntos de dados que capturem a variabilidade de campos reais: diferentes espécies de culturas, estágios de crescimento, estações do ano, condições de iluminação e altitudes. Por exemplo, o treinamento com imagens apenas de brotos jovens de milho pode não generalizar para espigas de trigo maduras. Conjuntos de dados representativos do campo garantem que o modelo aprenda características importantes na fazenda. Aumento de dados (culturas aleatórias, mudanças de brilho, desfoque de movimento) também pode ser aplicado durante o treinamento para simular o movimento e a iluminação de drones.

Na avaliação, é importante testar o modelo em condições o mais próximas possível da realidade. Ferramentas de simulação podem ajudar (por exemplo, voar com um drone virtual sobre campos 3D), mas testes de voo reais são o padrão ouro. O benchmarking a bordo é realizado executando o modelo no hardware real do UAV. Após a NAS, eles implantaram o candidato em um Jetson Nano e mediram uma inferência 28,1% mais rápida (em comparação com o YOLOv8n de referência) e melhor consumo de energia. Esse tipo de feedback de dispositivo real confirma que a busca produziu um modelo que realmente atende aos requisitos.
A generalização também é crucial. Um modelo pode ser pesquisado e treinado em uma cultura específica (por exemplo, trigo), mas os agricultores precisam de detectores que funcionem em diferentes campos. O estudo demonstrou uma forte generalização entre culturas: o detector derivado de NAS, treinado em uma tarefa, ainda apresentou bom desempenho em um conjunto de dados de outra cultura (plântulas de algodão) sem necessidade de re-treinamento. Isso sugere que o NAS adaptado ao contexto de implantação pode gerar arquiteturas robustas. No entanto, mudanças de domínio (por exemplo, de plantações de milho para pomares) ainda podem exigir ajustes finos ou pesquisas adicionais. Recomenda-se também a realização de testes entre diferentes estações do ano (imagens de verão versus imagens de outono).
Por fim, cada novo modelo deve ser testado em plataformas de drones antes de ser implantado. Isso inclui registrar sua precisão e velocidade em drones, garantir que o hardware não superaqueça e verificar o consumo de energia. Somente assim os agricultores poderão confiar nele para o monitoramento de missões críticas. Ao combinar treinamento relevante para o campo e avaliação rigorosa do hardware, o NAS (Sistema de Navegação Avançada) voltado para a implantação produz detectores que não são apenas teoricamente eficientes, mas comprovados em campo.
Vantagens em relação aos detectores de UAV projetados manualmente
O NAS com reconhecimento de implantação oferece diversas vantagens claras em relação aos modelos tradicionais de UAVs projetados manualmente:
1. Melhores compensações de desempenho: Os modelos encontrados pelo NAS tendem a fornecer combinações de maior precisão, velocidade e eficiência energética. Por exemplo, o melhor modelo executou 28% mais rápido e usou 18,5% a menos de energia no Jetson Nano do que a linha de base YOLOv8n escolhida manualmente, perdendo apenas ~2% no mAP de detecção. Alcançar esse equilíbrio manualmente seria muito difícil.
2. Generalização aprimorada: Os modelos descobertos pelo NAS podem ser mais adaptáveis a novas condições, uma vez que a busca pode incorporar diversos dados ou objetivos. O detector projetado automaticamente apresentou boa generalização em diferentes tipos de culturas (trigo e algodão) e condições de iluminação. Essa ampla robustez é crucial quando os voos encontram cenários inesperados.
3. Redução do esforço de engenharia: O NAS automatiza grande parte do processo de tentativa e erro. Em vez de ajustar manualmente os tamanhos das camadas e testar várias opções, um NAS com reconhecimento de implantação explora iterativamente as alternativas e encontra o melhor design para você. Isso economiza tempo e conhecimento especializado em desenvolvimento, facilitando a atualização dos detectores para novas tarefas ou hardware.
4. Escalabilidade: Uma vez configurada, a estrutura NAS pode ser usada para diferentes plataformas ou missões de UAVs. Por exemplo, a mesma NAS, adaptada ao contexto de implantação, poderia buscar um detector ajustado a uma resolução de câmera ou modelo de drone diferente, simplesmente alterando as restrições de entrada. Isso é muito mais escalável do que redesenhar redes do zero para cada cenário.
Desafios e limitações
O NAS com reconhecimento de implantação é poderoso, mas não é uma solução mágica. Deve ser aplicado com cuidado, levando em consideração suas demandas de recursos e a variabilidade do ambiente de destino. Apesar de promissor, o NAS com reconhecimento de implantação apresenta desafios:
1. Alto custo de pesquisa: A busca em espaço de arquiteturas (NAS) pode exigir um poder computacional considerável. Mesmo com algoritmos eficientes, a busca nesse espaço pode levar muitas horas de GPU (ou computação especializada). Se não for gerenciada com cuidado, a sobrecarga de busca pode ser proibitiva para algumas equipes.
2. Viés de dados e mudança de domínio: A arquitetura de rede neural (NAS) só é tão boa quanto os dados utilizados. Se as imagens de treinamento não forem representativas das condições de campo, a arquitetura encontrada pode apresentar desempenho inferior na realidade. Por exemplo, um modelo ajustado para um tipo de cultura ou região geográfica específica pode não se adaptar perfeitamente a outra região sem ajustes adicionais.
3. Heterogeneidade de hardware: O hardware de drones vem em diversas versões (diferentes GPUs, CPUs e FPGAs embarcados). Um modelo otimizado para uma placa pode não ser ideal para outra. Sistemas de armazenamento de dados (NAS) com reconhecimento de implantação precisam executar novas buscas para cada plataforma ou usar restrições conservadoras que se apliquem a todas – o que pode limitar o desempenho.
4. Restrições práticas: Implantações reais na agricultura envolvem questões como atualizações de rede via rádio, integração do sistema com o controle de voo e certificação de segurança. Mesmo o melhor modelo de NAS precisa ser integrado a um sistema completo de drones. Coordenar atualizações de modelos, aprovações regulatórias e treinamento de agricultores são obstáculos não técnicos.
Direções Futuras
É provável que o futuro testemunhe uma integração ainda mais estreita entre o projeto de modelos, a tecnologia de sensores e o controle de drones. O NAS (Sistema de Navegação Aérea) com reconhecimento de implantação continuará sendo uma ferramenta fundamental nesse processo de co-design. Olhando para o futuro, várias vias promissoras se abrem:
1. NAS online e adaptativo: Em vez de uma busca offline única, os sistemas futuros poderão ajustar a rede em tempo real ou entre voos. Por exemplo, um drone poderia começar com um modelo básico e, usando algoritmos NAS leves, se adaptar para lidar com novas condições de iluminação ou terreno em tempo real. Esse "NAS integrado ao dispositivo" é um grande desafio, mas poderia melhorar significativamente a adaptabilidade.
2. Projeto conjunto de sensores e modelos: Os futuros sistemas de agricultura de precisão poderão otimizar conjuntamente a escolha da câmera (RGB, multiespectral, infravermelha) e da rede neural. Os sistemas de redes neurais (NAS) adaptados à implantação poderão ser expandidos para incluir parâmetros do sensor (como as bandas espectrais utilizadas) em sua busca, encontrando a melhor combinação de hardware e modelo.
3. Integração multiespectral/hiperespectral: Como sugere o estudo sobre doenças do algodão, a integração de imagens multiespectrais pode impulsionar a detecção, especialmente de problemas em estágio inicial. Futuros estudos do Sistema Nacional de Aeronaves (NAS) poderiam explorar modelos multiespectrais que combinam canais RGB e infravermelho próximo para detectar mudanças sutis nas plantas de forma mais confiável.
4. Pipelines de decisão autônomos: Em última análise, detectores otimizados para NAS podem contribuir para a autonomia completa. Por exemplo, um drone poderia gerar automaticamente um plano de pulverização ou alertar os gestores agrícolas caso detecte determinadas condições. O NAS com reconhecimento de implantação poderia ser estendido a fluxos de trabalho de ponta a ponta (modelos de detecção e ação), otimizando todo o sistema.
5. Considerações éticas e ambientais: À medida que os drones se tornam mais capazes, devemos considerar a privacidade, a segurança do espaço aéreo e os impactos sobre a mão de obra agrícola (como observado por Agrawal e Arafat). Garantir que os drones otimizados para o Espaço Aéreo Nacional sejam usados de forma responsável na agricultura é um importante objetivo futuro.
Conclusão
A abordagem NAS (Navegação Não Avançada) com reconhecimento de implantação representa uma ferramenta poderosa para adaptar detectores de objetos leves para monitoramento de plantações com drones. Ao incorporar as restrições de hardware e missão do drone na busca, ela produz modelos que economizam computação e energia sem sacrificar muito a precisão. Por exemplo, um trabalho recente mostrou um detector projetado com NAS usando 37% a menos de FLOPs e 61% a menos de parâmetros do que o YOLOv8n de referência, mas seu mAP (Precisão Média de Acerto) caiu apenas em ~2%.
Em termos de hardware real de drones, isso significou inferência 28% mais rápida e 18% melhor eficiência energética. Esses ganhos se traduzem em tempos de voo mais longos, análises mais rápidas e suporte agrícola mais ágil. Comparado a modelos criados manualmente, o NAS com reconhecimento de implantação oferece melhor generalização de desempenho, menos esforço de ajuste manual e escalabilidade para novas plataformas de UAVs.
No contexto da agricultura de precisão, essas melhorias podem tornar o monitoramento de culturas por drones mais prático e eficaz. Drones equipados com detectores otimizados para NAS (Sistemas Navegantes Aéreos) podem identificar ervas daninhas, pragas ou estresse com mais confiabilidade, permitindo intervenções oportunas que economizam recursos e aumentam a produtividade. À medida que a agricultura continua a adotar drones e IA (Inteligência Artificial), os NAS adaptados à implantação desempenharão um papel central para garantir que os modelos executados nesses drones sejam eficientes, precisos e prontos para uso em campo. Eles preenchem a lacuna entre a pesquisa de ponta em redes neurais e as necessidades práticas dos agricultores, ajudando a impulsionar o futuro da agricultura de precisão orientada por dados.
Monitoramento de safras