Bezpilotné lietadlá (UAV) alebo drony transformujú moderné poľnohospodárstvo tým, že poskytujú rýchle letecké pohľady na polia. Používajú sa na skenovanie plodín z hľadiska zdravia, štádia rastu, škodcov, buriny a odhadu výnosov. Napríklad Čína má v súčasnosti v prevádzke viac ako 250 000 poľnohospodárskych dronov a v Thajsku bolo do roku 2023 pokrytých dronmi približne 301 TP3T poľnohospodárskej pôdy. Tieto UAV zefektívňujú poľnohospodárstvo tým, že rýchlo odhaľujú problémy (ako sú prepuknutia škodcov alebo nedostatok vody), ktoré sa na zemi dajú prehliadnuť.
Malé bezpilotné lietadlá (UAV) však majú veľmi obmedzený palubný výpočtový výkon a výdrž batérie. Spúšťanie zložitých algoritmov umelej inteligencie na nich v reálnom čase je preto výzvou. Tradičné ľahké modely detekcie objektov (ako sú malé detektory založené na YOLO alebo MobileNet) dokážu tieto potreby splniť len čiastočne: často obetujú presnosť alebo rýchlosť a vyžadujú si značné manuálne ladenie. Táto medzera motivuje k nasadeniu neurónové vyhľadávanie architektúry (NAS): automatizovaná metóda návrhu, ktorá prispôsobuje modely hlbokého učenia presným požiadavkám bezpilotných lietadiel nasadených v teréne.
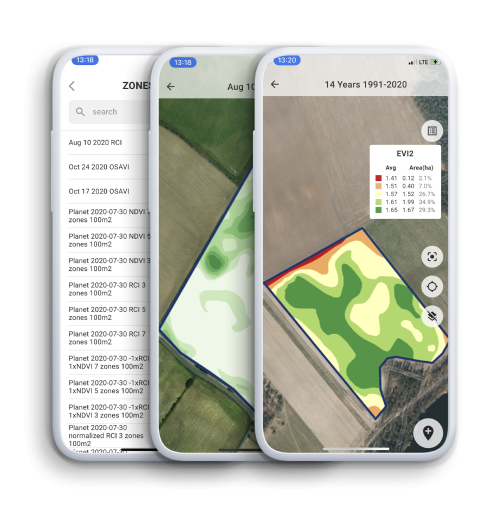
Moderné presné poľnohospodárstvo využíva bezpilotné lietadlá (UAV) na prieskum polí a monitorovanie stavu plodín. Preletom nad rozsiahlymi plochami môžu drony zhromažďovať snímky rastlín, pôdy a vzorov na poliach s vysokým rozlíšením. Tieto snímky sa prenášajú do algoritmov počítačového videnia, ktoré detekujú burinu medzi plodinami, odhadujú výnos (napr. počítanie plodov alebo úhorov) alebo zisťujú včasné príznaky chorôb alebo nedostatku živín. Drony napríklad umožňujú cielené postrekovanie herbicídmi na burinu, čím sa znižuje používanie chemikálií a náklady.
Malé palubné počítače v dronoch (často obmedzené na niekoľko wattov) však majú problém s prevádzkou veľkých neurónových sietí pri letovej rýchlosti. To sťažuje analýzu v reálnom čase: ak dron zaznamená problém, musí rýchlo reagovať alebo zaznamenať údaje skôr, ako sa vybije batéria. Súčasné ľahké detektory (napr. YOLOv8 nano, YOLO-tiny, MobileNets) sa navrhujú ručne a často zahŕňajú kompromisy: zmenšenie modelu ho zrýchľuje, ale môže znížiť presnosť.
V dôsledku toho existuje silná potreba metód, ktoré automaticky nájdu najlepší možný model vzhľadom na obmedzenia UAV. NAS s ohľadom na nasadenie spĺňa túto potrebu vyhľadávaním architektúr neurónových sietí, ktoré spoločne optimalizujú presnosť detekcie a využitie zdrojov (latencia, výkon, pamäť) v reálnych podmienkach UAV. Tento prístup môže poskytnúť špecializované modely, ktoré efektívne fungujú na hardvéri dronov a zároveň zostávajú vysoko presné pre úlohy monitorovania plodín.
Požiadavky na detekciu objektov UAV pri monitorovaní plodín
Poľnohospodárske bezpilotné lietadlá vykonávajú celý rad úloh vizuálnej detekcie, pričom každá má svoje vlastné požiadavky:
1. Zdravie plodín a detekcia stresu: Drony používajú RGB, termálne alebo multispektrálne kamery na identifikáciu stresovaných rastlín, nedostatku živín alebo príznakov chorôb. Algoritmy v reálnom čase dokážu mapovať variabilitu polí, riadiť zavlažovanie alebo hnojenie. Presná detekcia príznakov stresu rastlín umožňuje včasné zásahy na záchranu úrody.
2. Identifikácia buriny: Detekcia buriny medzi plodinami umožňuje poľnohospodárom postrekovači iba nechcených rastlín, čím sa šetrí herbicíd. Napríklad štúdia bavlníkových polí použila snímky z UAV s detektorom založeným na YOLOv7 a dosiahla presnosť približne 83% pri oddeľovaní buriny od bavlny. Rozlíšiť vizuálne podobné buriny a plodiny však zostáva v preplnených snímkach polí ťažké.

3. Detekcia škodcov a chorôb: Bezpilotné lietadlá (UAV) dokážu odhaliť ohniská škodcov (napr. kobylky, hmyz alebo plesňovú spálu) skôr ako ľudia pešo. Drony tiež podporujú mapovanie oblastí zamorených škodcami pomocou multispektrálneho zobrazovania, ktoré je lepšie ako samotné RGB. Rýchla a presná detekcia škodcov je kľúčová pre prevenciu šírenia.
4. Odhad výnosu: Počítanie ovocia, klasov obilia alebo rastlín zo vzduchu pomáha predpovedať objemy úrody. Modely vyškolené na detekciu jabĺk, melónov alebo klasov pšenice na snímkach z dronov môžu urýchliť odhad výnosov. Napríklad neurónové siete na snímkach z dronov sa používajú na počítanie úrody melónov a vodných melónov na poliach.
5. Geodetické a mapové práce: Drony tiež vytvárajú mapy polí (topografia, rozdiely v pôde), ktoré pomáhajú plánovať obrábanie pôdy. Hoci to nie je striktne detekcia objektov, je to súčasť monitorovania bezpilotnými lietadlami.
Tieto úlohy často vyžadujú inferenciu takmer v reálnom čase: dron letiaci nad poľami môže musieť spracovávať videozáznamy za behu (niekoľko snímok za sekundu), aby bolo možné okamžite prijímať rozhodnutia o riadení (ako je nastavenie výšky alebo aktivácia postrekovača). V iných prípadoch môžu byť prijateľné mierne oneskorenia (sekundy), ak sa údaje zaznamenávajú a analyzujú po pristátí.
Dôležité je, aby zrak UAV zvládal premenlivosť prostredia: jasné slnečné svetlo, tiene, rozmazanie pohybom spôsobené vetrom, prekrytie prekrývajúcimi sa listami alebo zmeny nadmorskej výšky a uhla. Veľkosti objektov sa líšia (blízke zábery buriny vs. vzdialené zhluky škodcov), takže detektory musia zvládať viacúrovňové prvky.
Poľnohospodárske misie UAV si nakoniec vyžadujú prísne kompromisy medzi presnosťou, latenciou a energiou. Vysoká presnosť detekcie je potrebná, aby sa predišlo prehliadnutiu buriny alebo škodcov, ale prevádzka veľmi hlbokej siete môže rýchlo vybiť batériu. Detekčný model preto musí byť rýchly a energeticky úsporný, no zároveň dostatočne presný na danú úlohu. Tieto prísne požiadavky zdôrazňujú, prečo je pre poľnohospodárske UAV potrebný špecializovaný návrh modelu.
Ľahké detektory objektov pre platformy UAV
Ľahké detektory objektov sú neurónové siete špeciálne navrhnuté na prevádzku na obmedzenom hardvéri. Často používajú malé chrbticové siete (ako MobileNet alebo ShuffleNet), zmenšené šírky vrstiev alebo zjednodušené dizajny krkov/hlavičiek. Napríklad modely rodiny YOLO zahŕňajú “nano” a “tiny” verzie (napr. YOLOv8n, YOLOv5s), ktoré majú menej parametrov a vyžadujú menej operácií (FLOP).
Takéto detektory dokážu bežať rýchlosťou desiatok snímok za sekundu na vstavanom hardvéri, ako je NVIDIA Jetson Nano alebo Google Coral. Napríklad Ag-YOLO bol vlastný detektor založený na YOLO pre palmové plantáže, ktorý bežal rýchlosťou 36,5 snímok za sekundu na Intel Neural Compute Stick 2 (s príkonom iba 1,5 W) a dosahoval vysokú presnosť (F1 = 0,9205). Tento model používal približne 12× menej parametrov ako YOLOv3-Tiny a zároveň zdvojnásobil svoju rýchlosť.

Tieto príklady ukazujú kompromisy v návrhu modelu: zníženie veľkosti alebo zložitosti modelu (napr. menej vrstiev alebo kanálov) zvyčajne zrýchľuje inferenciu a znižuje spotrebu energie, ale môže znížiť presnosť. Ag-YOLO obetoval časť kapacity, aby zvýšil rýchlosť a efektívnosť, no napriek tomu si udržal vysoké skóre F1 0,92 vo svojej úlohe.
Podobne boli porovnané tri varianty YOLOv7 na detekciu buriny: plný YOLOv7 dosiahol presnosť 83%, zatiaľ čo menšia sieť YOLOv7-w6 klesla na presnosť 63%. To ilustruje obmedzenie generických ľahkých detektorov: modely vyladené pre jedno prostredie alebo typ objektu môžu mať horší výkon v inom prostredí. Detektor zoštíhlený kvôli rýchlosti môže prehliadnuť jemné signály (napr. malé alebo maskované buriny), čo by znížilo jeho robustnosť za rôznych podmienok.
V poľnohospodárstve nemusia byť tieto generické ľahké siete optimálne bez ďalších úprav. Napríklad model YOLOv7, ktorý bol vopred trénovaný na bežných súboroch údajov, nemusí dokonale spracovať jedinečné textúry a mierky snímok plodín. Preto je potrebná optimalizácia architektúry modelu pre danú úlohu a platformu. Manuálne ladenie (zmena vrstiev, filtrov atď.) pre každý nový typ dronu alebo odrodu plodiny je prácne. To motivuje automatizované metódy – ako napríklad NAS s ohľadom na nasadenie – k nájdeniu najlepšej rovnováhy medzi veľkosťou, presnosťou a robustnosťou pre danú platformu UAV a poľnohospodársku aplikáciu.
Vyhľadávanie neurónovej architektúry v systémoch videnia založených na UAV
Vyhľadávanie neurónových architektúr (NAS) je automatizovaná metóda na navrhovanie architektúr neurónových sietí. Namiesto manuálneho nastavovania počtu vrstiev, filtrov a pripojení NAS používa algoritmy (učenie s posilňovaním, evolučné metódy alebo vyhľadávanie založené na gradientoch) na preskúmanie priestoru možných návrhov a nájdenie tých, ktoré optimalizujú zvolený cieľ (napríklad presnosť).
NAS sa už používa na vytváranie sietí optimalizovaných pre mobilné zariadenia. Napríklad MnasNet od spoločnosti Google bol priekopníckym “platformovo aware” NAS, ktorý priamo zahŕňal latenciu skutočného zariadenia do cieľa. MnasNet meral inferenčný čas na telefóne Google Pixel pre každý kandidátsky model počas vyhľadávania a vyvažoval presnosť s touto nameranou latenciou. Výsledkom bola rodina CNN, ktoré boli rýchle a presné na mobilnom hardvéri a prekonali manuálne navrhnuté modely MobileNet a NASNet na ImageNet.
Generické prístupy NAS, ako napríklad MnasNet, sa však zameriavajú na všeobecné úlohy videnia (klasifikácia ImageNet alebo detekcia COCO) a všeobecný hardvér (napr. mobilné telefóny). V prípade monitorovania plodín pomocou UAV je problém špecializovanejší. Chceme detektory optimalizované pre špecifické triedy objektov (rastliny, burina, škodcovia) a prispôsobené senzorom a letovému profilu UAV. Štandardný NAS, ktorý optimalizuje iba presnosť alebo generickú latenciu, môže prehliadať nuansy, ako je detekcia malých objektov alebo energetické obmedzenia.
Tradičné metódy NAS môžu byť tiež výpočtovo veľmi náročné (často vyžadujúce dni na veľkých klastroch GPU), čo nie je vždy praktické pre poľnohospodárskych výskumníkov. Preto sú pre UAV videnie potrebné špecifické NAS rámce. Tieto musia zahŕňať kritériá relevantné pre UAV a byť čo najefektívnejšie.
Vo všetkých prípadoch je kritické uvedomenie si obmedzení: NAS si musí byť vedomý obmedzení cieľového zariadenia (podobne ako MnasNet) a požiadaviek úloh UAV počas letu v reálnom čase. Ak je vyhľadávanie príliš pomalé alebo ignoruje spotrebu energie, výsledný model nemusí v teréne v skutočnosti dobre fungovať.
V praxi by NAS pre UAV videnie zahŕňal latenciu hardvéru a energiu priamo do vyhľadávacej metriky. Napríklad by sa dala merať snímková frekvencia kandidátskeho detektora na skutočnom počítači dronu (ako je NVIDIA Jetson) a použiť ju ako skóre. To je v kontraste s použitím jednoduchých proxy, ako sú FLOPy, ktoré nezachytávajú rýchlosť v reálnom svete.
Vďaka tomu dokáže NAS objaviť architektúry, ktoré najlepšie využívajú možnosti zariadenia. Stručne povedané, NAS ponúka spôsob automatického navrhovania detektorov pre UAV, ale musí byť prispôsobený tak, aby zohľadňoval úlohy špecifické pre UAV a požiadavky na efektivitu.
NAS s ohľadom na nasadenie: Základné princípy
NAS s ohľadom na nasadenie rozširuje NAS s ohľadom na hardvér tým, že do procesu návrhu zahŕňa kontext nasadenia a obmedzenia prostredia. Inými slovami, zohľadňuje nielen hardvér dronu (rýchlosť CPU/GPU, limity pamäte, energetickú náročnosť), ale aj to, s čím sa UAV v teréne skutočne stretne. To znamená explicitnú optimalizáciu metrík, ako je latencia inferencie na cieľovom zariadení, spotreba energie a pamäťová náročnosť, a to všetko pri zachovaní vysokej presnosti detekcie.
Napríklad počas NAS by bolo možné nasadiť každý kandidátsky model na Jetson Nano pripojenom k UAV a zaznamenávať jeho reálny čas inferencie a spotrebu energie. Táto empirická spätná väzba pomáha usmerňovať hľadanie modelov, ktoré skutočne spĺňajú kritériá nasadenia.
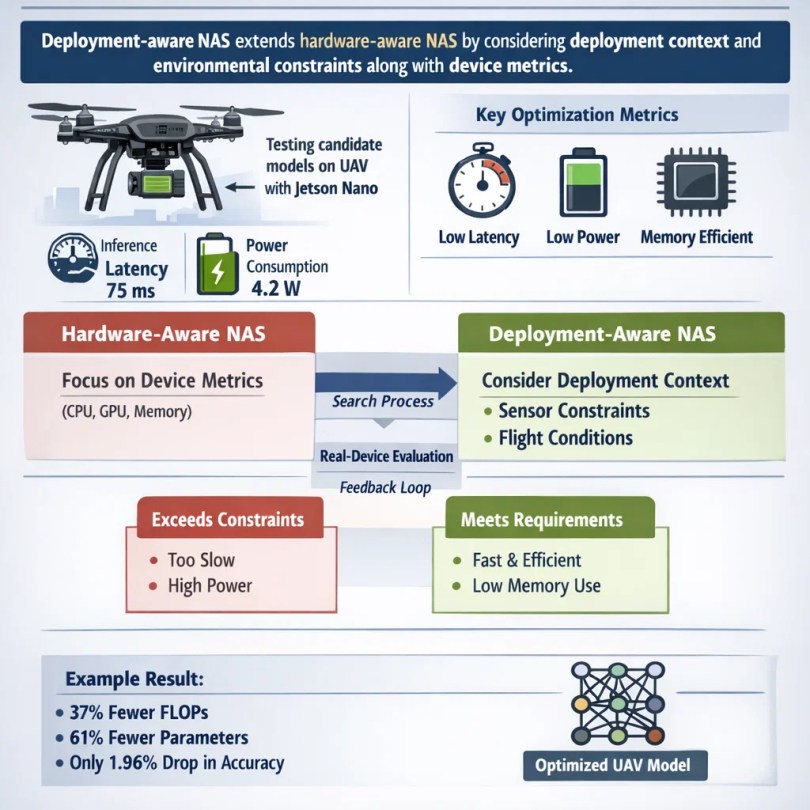
NAS s ohľadom na hardvér (ako napríklad MnasNet) sa zameriava na metriky zariadení, zatiaľ čo NAS s ohľadom na nasadenie ide ešte ďalej: môže zohľadniť vstupné charakteristiky senzorov (napr. rozlíšenie obrazu, multispektrálne kanály) a cieľové hodnoty latencie aplikácie (potrebný počet snímok za sekundu). Môže dokonca zahŕňať obmedzenia letu, ako je maximálna povolená pamäť, alebo zahŕňať vyhodnotenia za simulovaných otrasov vetra alebo rozmazania pohybom.
NAS zohľadňujúci nasadenie môže penalizovať architektúry, ktoré prekračujú napríklad 5W odber energie alebo potrebujú viac pamäte, ako má dron. Týmto spôsobom sa vyhľadávanie prirodzene prikláňa k praktickým modelom pre prevádzku UAV v teréne. V podstate je NAS zohľadňujúci nasadenie o uzavretí slučky medzi návrhom modelu a reálnym použitím. Namiesto izolovaného výberu architektúry a dúfania, že bude fungovať, systematicky zahŕňa testovanie na reálnych zariadeniach počas vyhľadávania.
Napríklad Kerec a kol. (2026) použili takýto rámec na vyhľadávanie detektora UAV: postavili základnú líniu YOLOv8n, ale do vyhľadávania zahrnuli latenciu a energiu Jetson Nano. Výsledný model mal o 37% menej GFLOP a o 61% menej parametrov ako YOLOv8n, s poklesom mAP iba o 1,96%. To jasne ukazuje, ako obmedzenia nasadenia viedli NAS k oveľa ľahšej a rýchlejšej sieti.
Úloha NAS s ohľadom na nasadenie v monitorovaní presného poľnohospodárstva
NAS s ohľadom na nasadenie môže výrazne zlepšiť monitorovanie plodín pomocou UAV prispôsobením detektorov poľnohospodárskym podmienkam. Napríklad vyhľadávanie môže uprednostňovať architektúry, ktoré vynikajú v detekcii malých, tenkých objektov (ako sú úzke buriny alebo tenké sadenice kukurice) alebo v rozlišovaní rastlín od pôdneho pozadia. Dokáže prispôsobiť hĺbku siete a receptívne polia typickej výške letu: v nízkej nadmorskej výške objekty vypĺňajú obraz a môžu vyžadovať jemné detaily, zatiaľ čo vo vyššej nadmorskej výške by sieť mala byť dobrá v detekcii v malom meradle. NAS s ohľadom na nasadenie dokáže tieto požiadavky zakódovať do svojho vyhľadávacieho priestoru.
Rýchlosť je v teréne kritická. Predstavte si, že dron detekuje prepuknutie škodcov; ak je model dostatočne rýchly na to, aby spracoval video napríklad s frekvenciou 30 snímok za sekundu, môže upozorniť pilota alebo spustiť okamžitý liečebný zásah. V testoch model navrhnutý systémom NAS bežal na serveri Jetson Nano o 28% rýchlejšie ako štandardný model YOLOv8n vďaka svojej optimalizovanej architektúre. Počas behu ONNX tiež spotreboval o 18,5% menej energie, čo znamená, že dron môže letieť dlhšie s rovnakou batériou. Vďaka týmto výhodám je rozhodovanie počas letu uskutočniteľnejšie a predlžuje sa trvanie misie.
Ďalšou výhodou je robustnosť. Keďže NAS s ohľadom na nasadenie zahŕňa skutočné vyhodnotenie zariadenia, vyhľadávanie môže zahŕňať testy za rôznych podmienok. Môže napríklad simulovať slabé osvetlenie alebo zahŕňať tréningové snímky z úsvitu a súmraku, čím sa zabezpečí, že konečný detektor si zachová presnosť aj pri skutočných zmenách počasia a osvetlenia. Práca ukázala, že detektor odvodený od NAS sa dobre zovšeobecnil: testovali ho na dvoch rôznych súboroch údajov o plodinách (klasy pšenice a sadenice bavlny) a v oboch prípadoch zistili silný výkon.

To naznačuje, že NAS s ohľadom na nasadenie pomohlo nájsť spoločné a užitočné funkcie pre poľnohospodárstvo, čím sa zlepšila ich generalizácia na nové oblasti. Celkovo NAS s ohľadom na nasadenie pomáha vyvážiť presnosť s dlhším časom letu. Znížením výpočtov spotrebúvajú drony menej energie a dokážu pokryť väčšiu plochu na jedno nabitie batérie, pričom stále spoľahlivo detekujú plodiny a škodcov.
Návrh vyhľadávacieho priestoru pre poľnohospodárske detektory UAV
Dôležitou súčasťou NAS s ohľadom na nasadenie je vyhľadávací priestor – súbor možných sieťových návrhov, ktoré zvažuje. Pre detektory plodín UAV je možné vyhľadávací priestor vytvoriť tak, aby zahŕňal sľubné architektúry pre túto doménu. Medzi kľúčové časti patria:
1. Návrh chrbtice: Chrbticou je extraktor prvkov. Pre UAV by sa dali zahrnúť ľahké konvolučné stavebné bloky, ako sú napríklad hĺbkovo oddeliteľné konvolúcie (ako sa používajú v MobileNet) alebo invertované reziduálne bloky. Invertované reziduá a lineárne úzke miesta (štýl MobileNetV2) sú dobre známe pre mobilnú efektívnosť. Vyhľadávací priestor by mohol umožniť zmenu šírky (počet kanálov) a hĺbky každého bloku tak, aby zodpovedal výpočtovému rozpočtu UAV. Ak si ich UAV môže dovoliť pri nízkom výkone, môžu sa zahrnúť aj moduly zamerané na pozornosť alebo moduly inšpirované transformátorom.
2. Dizajn krku: Mnohé detektory objektov používajú pyramídy prvkov (FPN) alebo siete agregácie ciest na kombinovanie viacškálových prvkov. Vyhľadávanie by mohlo preskúmať zjednodušené FPN alebo ľahkú agregáciu prvkov. Možnosťou by mohlo byť napríklad použitie jednoškálovej hlavice oproti viacškálovým hlaviciam. Tento priestor by mohol umožniť združovanie vrstiev alebo preskakovanie spojení, ktoré pomáhajú detekovať objekty rôznych veľkostí.
3. Dizajn hlavy: Detekčná hlavica (klasifikačné a boxové regresné vrstvy) sa tiež môže meniť. Pre UAV hľadajúce rovnomerné polia môže stačiť jednoduchšia hlavica. Ale na zachytenie malých nedokonalostí môže vyhľadávanie zahŕňať ďalšie konvolučné vrstvy alebo rôzne schémy kotiev.
4. Ľahké operácie: Vyhľadávací priestor môže explicitne povoliť iba nízkonákladové operácie. Napríklad výber medzi konverziou 3×3 a lacnejšou faktorizovanou konverziou 1×3+3×1 alebo zahrnutie modulov GhostNet. Môže tiež povoliť malé veľkosti jadra alebo zmenšené rozmery na obmedzenie výpočtov. Všetky tieto možnosti sú riadené hardvérom. Priestor môže zakázať akúkoľvek konfiguráciu vrstvy, ktorá prekračuje pamäťový limit dronu alebo očakávaný energetický prah.
Starostlivým návrhom tohto vyhľadávacieho priestoru je proces NAS vedený k efektívnym, ale zároveň účinným architektúram. Výsledkom môže byť nová kombinácia blokov, ktoré sa v štandardných modeloch nezohľadňujú. Najlepší nájdený detektor použil vlastné výbery blokov, ktoré znížili GFLOP o 37% a parametre o 61% v porovnaní s YOLOv8n.
Toto bolo možné, pretože NAS dokázal kombinovať prvky chrbtice a hlavy v rámci obmedzení UAV. Stručne povedané, priestor pre hľadanie poľnohospodárskych detektorov UAV sa zameriava na škálovateľné, ľahké stavebné bloky a manipuláciu vo viacerých mierkach, to všetko v rámci možností palubného hardvéru.
Ciele a obmedzenia optimalizácie
NAS s ohľadom na nasadenie musí zvládať viacero cieľov. Primárnym cieľom je zvyčajne presnosť detekcie (napr. priemerná priemerná presnosť, mAP), meraná na súboroch údajov z monitorovania plodín. Napríklad mAP@50 (presnosť pri 50% IOU) je bežnou metrikou. Model optimalizovaný pre NAS mal pokles mAP@50 iba o 1,96% v porovnaní so základným YOLOv8n, čo je veľmi malá strata vzhľadom na dosiahnuté zisky. Zohľadňuje sa aj presnosť a úplnosť (alebo skóre F1) na kľúčových triedach (burina, plodiny).
Zároveň je potrebné optimalizovať latenciu a energiu. Latencia je čas inferencie na obrázok; pre vstavaný grafický procesor (GPU) to môže byť 20 – 50 ms alebo viac. Nižšia latencia znamená vyššiu snímkovú frekvenciu. Spotreba energie (jouly na snímku) je kľúčová pre vytrvalosť letu. Ďalším obmedzením je pamäťová náročnosť (počet parametrov, veľkosť modelu); modely sa musia zmestiť do pamäte RAM zariadenia. Preto NAS zvyčajne stanovuje cieľ alebo penalizáciu pre tieto obmedzenia.
Napríklad akýkoľvek model pomalší ako určitá prahová hodnota alebo nad rozpočtom parametrov môže byť znížený. Toto efektívne mení NAS na viacúčelový optimalizačný problém: maximalizovať presnosť a zároveň minimalizovať latenciu, energiu a veľkosť.
Prakticky by sa to dalo dosiahnuť váženým súčtom cieľov alebo tvrdými obmedzeniami. Niektoré metódy dávajú veľkú penalizáciu každému kandidátovi, ktorý prekročí výkonový limit UAV. Iné explicitne vypočítavajú energetickú metriku: modely boli testované v prostredí ONNX na meranie “energetickej účinnosti” a najlepší model bol o +18,5% energeticky účinnejší ako YOLOv8n. Toto bol jeden z cieľov, ktorými sa riadili pri hľadaní.
Zistené kompromisy si možno vizualizovať na Paretovej hranici: na jednom konci extrémne rýchle malé modely s nižšou presnosťou; na druhom konci veľké presné modely, ktoré sú pre dron príliš pomalé alebo energeticky náročné. NAS so zameraním na nasadenie sa snaží nájsť na tejto hranici ideálne miesto, ktoré zodpovedá skutočným prioritám misie (napr. mierna strata presnosti pri veľkom zrýchlení). Stručne povedané, NAS musí spoločne zvážiť metriky presnosti (mAP, F1) a inferenčné obmedzenia (ms na snímku, jouly na snímku, pamäť). Táto vyvážená optimalizácia robí model skutočne pripraveným na nasadenie v bezpilotných lietadlách (UAV).
Školenie a hodnotenie v realistických poľnohospodárskych podmienkach
Aby detektory nájdené v NAS dobre fungovali, musia byť trénované a testované na realistických poľnohospodárskych údajoch. To znamená použitie súborov údajov, ktoré zachytávajú variabilitu reálnych polí: rôzne druhy plodín, štádiá rastu, ročné obdobia, svetelné podmienky a nadmorské výšky. Napríklad trénovanie na obrázkoch iba mladých výhonkov kukurice sa nemusí zovšeobecniť na zrelé pšeničné hlavy. Súbory údajov reprezentatívne pre dané pole zabezpečujú, že model sa naučí vlastnosti, ktoré sú na farme dôležité. Počas trénovania je možné použiť aj rozšírenie údajov (náhodné plodiny, zmeny jasu, rozmazanie pohybom) na napodobnenie pohybu a osvetlenia dronu.

Pri hodnotení je dôležité otestovať model v čo najreálnejších podmienkach. Simulačné nástroje môžu pomôcť (napr. lietanie s virtuálnym dronom nad 3D poľami), ale zlatým štandardom sú skutočné letové testy. Palubné porovnávanie sa vykonáva spustením modelu na skutočnom hardvéri UAV. Po nasadení NAS nasadili kandidáta na Jetson Nano a namerali o 28,1% rýchlejšiu inferenciu (v porovnaní so základným modelom YOLOv8n) a lepšiu spotrebu energie. Tento druh spätnej väzby z reálneho zariadenia potvrdzuje, že vyhľadávanie vytvorilo model, ktorý skutočne spĺňa požiadavky.
Zovšeobecnenie je tiež dôležité. Model by sa mohol vyhľadávať a trénovať na jednej plodine (napríklad pšenici), ale farmári potrebujú detektory, ktoré fungujú naprieč poľami. Štúdia preukázala silnú zovšeobecnenie naprieč plodinami: detektor odvodený z NAS, trénovaný na jednej úlohe, stále fungoval dobre na inom súbore údajov o plodinách (sadenice bavlny) bez pretrénovania. To naznačuje, že NAS s ohľadom na nasadenie môže priniesť robustné architektúry. Zmeny domén (napr. presun z kukuričných polí do sadov) však môžu stále vyžadovať doladenie alebo ďalšie vyhľadávanie. Odporúča sa aj testovanie naprieč sezónami (letné vs. jesenné snímky).
Nakoniec, každý nový model by mal byť pred nasadením porovnaný s platformou UAV. To zahŕňa zaznamenávanie jeho presnosti a rýchlosti na dronoch, zabezpečenie neprehrievania hardvéru a overenie spotreby energie. Až potom mu môžu farmári dôverovať pri monitorovaní kritických úloh. Kombináciou školenia relevantného pre danú oblasť a dôkladného hodnotenia hardvéru prináša NAS detektory, ktoré sú nielen teoreticky účinné, ale aj overené v praxi.
Výhody oproti manuálne navrhnutým detektorom UAV
NAS systémy s ohľadom na nasadenie ponúkajú oproti tradičným, manuálne navrhnutým modelom pre UAV niekoľko jasných výhod:
1. Lepšie kompromisy v oblasti výkonu: Modely nájdené v NAS zvyčajne poskytujú vyššie kombinácie presnosti, rýchlosti a energetickej účinnosti. Napríklad najlepší model bežal na 28% rýchlejšie a spotreboval o 18,5% menej energie na Jetson Nano ako manuálne zvolená základná línia YOLOv8n, pričom v detekčnej mAP stratil iba ~2%. Dosiahnuť takúto rovnováhu manuálne by bolo veľmi ťažké.
2. Vylepšená generalizácia: Modely objavené NAS sa môžu lepšie prispôsobiť novým podmienkam, pretože vyhľadávanie môže zahŕňať rozmanité údaje alebo ciele. Automaticky navrhnutý detektor sa dobre zovšeobecnil na rôzne druhy plodín (pšenica a bavlna) a svetelné podmienky. Táto široká robustnosť je kľúčová, keď sa lety stretnú s neočakávanými scénami.
3. Znížené inžinierske úsilie: NAS automatizuje veľa metódy pokus-omyl. Namiesto manuálneho upravovania veľkostí vrstiev a testovania mnohých kandidátov, NAS s ohľadom na nasadenie iteratívne skúma možnosti a nájde pre vás najlepší návrh. To šetrí čas vývoja a odborné znalosti, čo uľahčuje aktualizáciu detektorov pre nové úlohy alebo hardvér.
4. Škálovateľnosť: Po nastavení je možné NAS framework použiť pre rôzne platformy alebo misie UAV. Napríklad ten istý NAS s podporou nasadenia by mohol vyhľadať detektor naladený na iné rozlíšenie kamery alebo model dronu jednoduchou zmenou vstupných obmedzení. Toto je oveľa škálovateľnejšie ako prepracovanie sietí od nuly pre každý scenár.
Výzvy a obmedzenia
NAS systém s ohľadom na nasadenie je výkonný, ale nie zázračný nástroj. Musí sa používať premyslene, s vedomím jeho nárokov na zdroje a variability cieľového prostredia. Napriek svojmu potenciálu má NAS systém s ohľadom na nasadenie aj svoje výzvy:
1. Vysoké náklady na vyhľadávanie: NAS môže vyžadovať značné výpočty. Aj s efektívnymi algoritmami môže prehľadávanie priestoru architektúry trvať mnoho hodín práce s GPU (alebo špecializovaných výpočtov). Ak nie sú starostlivo spravované, réžia vyhľadávania môže byť pre niektoré tímy neúnosná.
2. Skreslenie údajov a posun domény: NAS je len taký dobrý, ako sú dobré použité dáta. Ak tréningové obrazy nereprezentujú poľné podmienky, nájdená architektúra môže v skutočnosti podávať slabšie výsledky. Napríklad model vyladený pre jeden typ plodiny alebo jednu geografickú oblasť sa nemusí dokonale preniesť na iný bez ďalšej adaptácie.
3. Heterogenita hardvéru: Hardvér UAV sa dodáva v mnohých variantoch (rôzne vstavané grafické karty (GPU), procesory (CPU), FPGA). Model optimalizovaný pre jednu dosku nemusí byť optimálny na inej. NAS systém s ohľadom na nasadenie musí buď pre každú platformu znova spustiť vyhľadávanie, alebo použiť konzervatívne obmedzenia, ktoré vyhovujú všetkým – čo môže obmedziť výkon.
4. Praktické obmedzenia: Skutočné nasadenie v poľnohospodárstve zahŕňa problémy, ako sú aktualizácie siete cez bezdrôtové pripojenie, systémová integrácia s riadením letu a bezpečnostná certifikácia. Aj ten najlepší model NAS musí byť integrovaný do kompletného systému dronov. Koordinácia aktualizácií modelu, regulačné schválenia a školenie farmárov sú netechnické prekážky.
Budúce smery
V budúcnosti sa pravdepodobne dočkáme ešte užšej integrácie návrhu modelov, senzorovej technológie a riadenia UAV. NAS s ohľadom na nasadenie zostane kľúčovým nástrojom v tomto procese spoločného návrhu. Do budúcnosti sa objavuje niekoľko zaujímavých možností:
1. Online a adaptívny NAS: Namiesto jednorazového offline vyhľadávania by budúce systémy mohli upravovať sieť v reálnom čase alebo medzi letmi. Napríklad dron by mohol začať so základným modelom a pomocou odľahčených algoritmov NAS sa sám upravovať tak, aby zvládal nové svetelné alebo terénne podmienky za behu. Tento “NAS na zariadení” je veľmi náročný, ale mohol by výrazne zlepšiť prispôsobivosť.
2. Spoločný návrh senzorov a modelov: Budúce systémy presného poľnohospodárstva by mohli spoločne optimalizovať výber kamery (RGB, multispektrálna, infračervená) a neurónovej siete. NAS s ohľadom na nasadenie by sa mohol rozšíriť o zahrnutie parametrov senzorov (ako napríklad použitých spektrálnych pásiem) do svojho vyhľadávania a nájsť tak najlepšiu kombináciu hardvéru a modelu.
3. Multispektrálna/hyperspektrálna integrácia: Ako naznačuje štúdia choroby bavlny, integrácia multispektrálnych snímok môže zlepšiť detekciu, najmä problémov v ranom štádiu. Budúce NAS by mohli preskúmať modely s viacerými prúdmi, ktoré spájajú kanály RGB a blízkeho infračerveného žiarenia, aby spoľahlivejšie detekovali jemné zmeny rastlín.
4. Procesy autonómneho rozhodovania: Detektory optimalizované pre NAS môžu v konečnom dôsledku viesť k úplnej autonómii. Napríklad dron by mohol automaticky vygenerovať plán postreku alebo upozorniť manažérov fariem, ak zistí určité podmienky. NAS zohľadňujúci nasadenie by sa mohol rozšíriť na end-to-end portfóliá (modely detekcie + akcie), čím by sa optimalizoval celý systém.
5. Etické a environmentálne aspekty: Keďže sa bezpilotné vzdušné systémy stávajú výkonnejšími, musíme zvážiť súkromie, bezpečnosť vzdušného priestoru a vplyv na poľnohospodársku prácu (ako poznamenali Agrawal a Arafat). Dôležitým cieľom do budúcnosti je zabezpečiť, aby sa drony optimalizované pre NAS používali v poľnohospodárstve zodpovedne.
Záver
NAS s ohľadom na nasadenie predstavuje výkonný prístup k prispôsobeniu ľahkých detektorov objektov pre monitorovanie plodín pomocou bezpilotných lietadiel (UAV). Začlenením hardvéru bezpilotných lietadiel a obmedzení misie do vyhľadávania vytvára modely, ktoré šetria výpočty a energiu bez toho, aby sa znížila presnosť. Napríklad nedávna práca ukázala, že detektor navrhnutý pomocou NAS používa o 37% menej FLOP a 61% menej parametrov ako referenčný YOLOv8n, no jeho mAP klesol iba o ~2%.
Na skutočnom hardvéri dronov to znamenalo pre 28% rýchlejšiu inferenciu a 18% lepšiu energetickú účinnosť. Takéto zisky sa premietajú do dlhších letových časov, rýchlejšej analýzy a responzívnejšej podpory poľnohospodárstva. V porovnaní s manuálne vytvorenými modelmi poskytuje NAS systém s ohľadom na nasadenie lepšiu generalizáciu výkonu, menšiu námahu pri manuálnom ladení a škálovateľnosť pre nové platformy UAV.
V kontexte presného poľnohospodárstva môžu tieto vylepšenia zvýšiť praktickosť a efektivitu monitorovania plodín pomocou bezpilotných lietadiel (UAV). Drony vybavené detektormi optimalizovanými pre NAS dokážu spoľahlivejšie odhaliť burinu, škodcov alebo stres, čo umožňuje včasné zásahy, ktoré šetria zdroje a zvyšujú výnosy. Keďže poľnohospodárstvo naďalej zavádza drony a umelú inteligenciu, NAS s ohľadom na ich nasadenie bude hrať ústrednú úlohu pri zabezpečovaní efektívnosti, presnosti a pripravenosti modelov bežiacich na týchto dronoch. Premosťuje priepasť medzi špičkovým výskumom neurónových sietí a praktickými potrebami poľnohospodárov a pomáha poháňať budúcnosť presného poľnohospodárstva riadeného dátami.
Monitorovanie plodín