Planificarea automată a eșantionării solului este o tehnică modernă de agricultură de precizie care utilizează software și algoritmi pentru a proiecta scheme de eșantionare optimizate pentru câmpurile agricole. În loc să aleagă manual locațiile de prelevare a probelor (de exemplu, prin parcurgerea câmpului într-o grilă sau trasarea unor zone subiective), sistemele automate preiau diverse straturi de date (hărți, randamente istorice, imagini din satelit etc.) și calculează locul de colectare a carotelor de sol.
Pe scurt, înlocuiește o mare parte din presupuneri și efortul manual cu știința bazată pe date. Instrumentele moderne pot “construi planuri de eșantionare a solului în câteva minute pe unul sau mai multe câmpuri” alegând opțiuni de eșantionare pe grilă sau zonă și utilizând “algoritmi inteligenți pentru a plasa puncte și a trasa traseul”. Scopul este de a surprinde cu precizie variabilitatea solului, reducând în același timp timpul, costurile și munca pe teren.
Cum este diferit de eșantionarea tradițională?
Metodele tradiționale de eșantionare implicau adesea împărțirea unui câmp în celule egale (eșantionare pe grilă) sau zone euristice și apoi colectarea unui număr fix de carote în fiecare celulă. De exemplu, eșantionarea pe grilă împarte un câmp într-o grilă obișnuită (adesea celule de 1-5 acri) și prelevează carote de sol din fiecare celulă. Deși este utilizată pe scară largă, aceasta poate însemna sute de probe și costuri foarte ridicate ale forței de muncă: o grilă uniform spațiată poate produce un număr mare de sonde, crescând timpul și costurile necesare atât pentru colectare, cât și pentru lucrările de laborator.
În mod similar, eșantionarea zonală se baza pe judecata unui agronom pentru a trasa hărți ale “zonelor de gestionare” (zone presupuse a fi similare), dar acest lucru era subiectiv și putea omite modele ascunse. Prin contrast, planificarea automatizată folosește date (cum ar fi hărți de randament, studii de sol, imagini NDVI din satelit sau scanări de conductivitate electrică) pentru a identifica modele reale de variabilitate. Practic, permite computerelor să determine unde ar trebui prelevate mici carote de sol, astfel încât testele finale de laborator să reprezinte cel mai bine câmpul.
Obiectivul principal al planificării automate a eșantionării solului este simplu: maximizarea calității datelor și a informațiilor utile, reducând în același timp efortul și costurile. O eșantionare bună surprinde variabilitatea reală a câmpului, permițând fertilizarea sau aplicarea ulterioară a zolelor cu var precise. În același timp, prelevarea a mii de probe inutile este o risipă. Planificarea automată caută “punctul ideal” statistic – suficiente puncte pentru a cartografia cu precizie fertilitatea, dar nu mai mult decât este necesar.
În termeni practici, aceasta înseamnă o acuratețe ridicată a datelor și rezultate concrete, cu cel mai mic timp și cheltuieli. De exemplu, un studiu recent a arătat că gruparea unui câmp în zone de gestionare omogene le-a permis fermierilor să reducă probele de sol necesare cu 50–75% fără a sacrifica informații.
Astfel de câștiguri în eficiență susțin în mod direct profituri mai mari și un impact mai mic asupra mediului. Într-adevăr, cercetătorii agricoli subliniază faptul că gestionarea precisă a solului (inclusiv eșantionarea atentă) poate stimula productivitatea și reduce deșeurile - o nevoie critică, deoarece populația globală se apropie de 10 miliarde până în 2050.
Componentele de bază ale sistemului automat de planificare a solului
În studii recente privind adoptarea agriculturii de precizie, peste 40% de ferme mari la nivel global raportează utilizarea unor straturi de date avansate, cum ar fi imagini din satelit sau hărți ale conductivității electrice a solului, ca parte a operațiunilor lor de rutină (date din 2024). În 2023, piața globală a agriculturii de precizie a depășit 10 miliarde USD, serviciile bazate pe sol și date crescând cu aproape 12% anual.
Aceste fapte subliniază modul în care componentele de bază descrise mai jos nu sunt teoretice, ci instrumente din ce în ce mai comune în fermele moderne. Un planificator automat de eșantionare a solului constă de obicei din trei părți:
- intrări de date,
- algoritmi de analiză și
- rezultate/livrabile.
Fiecare parte se combină pentru a transforma datele brute de teren într-un plan de eșantionare gata de utilizare.
A. Introducerea și integrarea datelor
Software-ul de planificare automată consumă o varietate de date de teren. Datele de intrare comune includ:
1. Hărți geospațiale: Acestea îi spun computerului unde și cum variază fizic câmpul. Exemple sunt limitele digitale ale câmpului (adesea sub formă de fișiere shapefile sau fișiere KML) și modelele topografice/de elevație (date DEM). Altitudinea influențează umiditatea solului și distribuția nutrienților, astfel încât planificatorii adesea ponderează diferit zonele înalte și cele joase. Dacă sunt disponibile, se pot folosi și straturi GIS agricole, cum ar fi zonele de gestionare existente.

2. Date istorice ale testelor de sol: Rezultatele analizelor anterioare ale solului (cum ar fi hărțile pH-ului, azotului, fosforului, potasiului, materiei organice) sunt extrem de valoroase. Acestea arată direct unde solul are fertilitate scăzută sau ridicată. Planificatorii pot importa rezultatele de laborator anterioare sub formă de hărți sau foi de calcul. Dacă ferma a efectuat teste timp de ani de zile, acest istoric ajută la adaptarea planului la punctele problematice cunoscute.
3. Hărți ale randamentului: Multe ferme au monitoare de randament pentru combine agricole din sezoanele anterioare. Straturile care arată ce părți ale câmpului produc în mod constant randamente mari sau mici pot indica diferențe subiacente de sol. De exemplu, părțile câmpului care au avut întotdeauna randamente mici ar putea fi sărace în nutrienți; planificatorii de eșantionare folosesc hărți ale frecvenței randamentelor pentru a găsi astfel de zone. Se recomandă combinarea datelor de randament din mai mulți ani, astfel încât vremea neobișnuită dintr-un an (inundații, secetă) să nu denatureze planul.
4. Date de teledetecție: Imaginile culturilor obținute prin satelit sau cu drona sunt neprețuite pentru identificarea tiparelor invizibile cu ochiul liber. Indicii de vegetație precum NDVI (Normalized Difference Vegetation Index - Indicele de Vegetație cu Diferență Normalizată) sau NDRE surprind vigoarea plantelor, reflectând adesea fertilitatea sau umiditatea solului. O hartă NDVI de vară fără nori poate evidenția zonele cu o creștere constantă mai bună sau mai slabă a culturilor. Mulți planificatori folosesc, de asemenea, imagini multispectrale aeriene sau cu drona. În plus, hărțile senzorilor proximali, cum ar fi conductivitatea electromagnetică (ECa), oferă informații despre textura solului și conținutul de sare, care se corelează adesea cu fertilitatea.
În practică, planificatorii buni permit utilizatorilor să importe sau să lege oricare dintre aceste straturi. De exemplu, un instrument bazat pe cloud ar putea permite unui fermier să încarce un fișier de formă cu limitele câmpului și apoi să suprapună o imagine NDVI și hărți de randament pentru același câmp. Software-ul le analizează apoi împreună.
După cum notează un ghid de extindere, proprietățile solului, cum ar fi carbonul organic, conductivitatea electrică (ECa), textura solului (nisip/nămol/argilă), topografia, fotografiile aeriene și indici precum NDVI s-au dovedit utile în delimitarea zonelor de gestionare. Prin reunirea acestor straturi de date într-un singur sistem, planificatorul poate “vedea” imaginea de ansamblu a variabilității terenului înainte de a alege puncte de prelevare.
B. Algoritmul și logica planificării
Algoritmii stau la baza eșantionării automate a solului. Începând cu 2025, multe platforme comerciale integrează acum tehnici de clusterizare prin învățare automată, modele statistice hibride sau generarea de zone bazate pe PCA. Performanța lor este adesea evaluată prin validare încrucișată folosind date despre sol reținute, utilizatorii raportând o îmbunătățire de până la 15-20% în captarea varianței în comparație cu metodele vechi. Mai jos este prezentat cum funcționează metodele tipice:
1. Eșantionare bazată pe zone (grupată)Aceasta este cea mai comună metodă. Sistemul folosește logica de clusterizare pe hărțile de intrare pentru a împărți câmpul în zone distincte, similare intern. De exemplu, ar putea rula o clusterizare k-means pe straturile de date combinate (de exemplu, randament + NDVI + date despre sol) pentru a forma 3-6 “zone de gestionare”. Deoarece fiecare zonă este presupusă destul de uniformă, sunt necesare doar câteva eșantioane per zonă.
Software-ul distribuie apoi puncte de eșantionare în fiecare zonă (adesea sub formă de grilă mică sau puncte aleatorii) pentru a capta orice variabilitate rămasă. Instrumentele moderne permit adesea utilizatorului să pondereze diferite straturi de date sau să ajusteze numărul de zone. Unele folosesc chiar mai întâi PCA (Analiza Componentelor Principale) pentru a reduce datele și apoi a grupa rezultatele.

2. Eșantionare pe grilă: În acest mod, software-ul suprapune pur și simplu o grilă obișnuită peste teren și generează câte un punct în centrul fiecărei celule. Utilizatorii pot seta dimensiunea celulei (de exemplu, 1,5 acri) sau un număr total de puncte. Planificatorul poate, de asemenea, adapta densitatea grilei în teren variabil: de exemplu, celule mai mici pe dealuri unde variabilitatea este mai mare și celule mai mari pe teren plat. Avantajul este acoperirea uniformă, fără prejudecăți.
Dezavantajul este că o grilă foarte fină înseamnă multe mostre, dar o grilă grosieră poate omite detalii. Sistemele automate pot ajuta la alegerea unei spațieri rezonabile - de exemplu, studiile sugerează că o grilă de 1 acru capturează aproximativ 80% de variabilitate pe teren, în timp ce o grilă de 2,5 acri scade la o precizie de ~76%. Unele programe software oferă feedback cu privire la precizia sau acoperirea așteptate pe baza grilei alese.
3. Eșantionare direcționată (țintită): Unele câmpuri au probleme specifice cunoscute (de exemplu, zone saline, “zone moarte” cu randament scăzut sau zone cu compactare). Un planificator automat poate încorpora aceste probleme prin plasarea unor puncte suplimentare acolo. De exemplu, dacă imaginile din satelit sau o hartă a energiei electrice arată un punct fierbinte de salinitate, utilizatorul ar putea instrui instrumentul să adauge probe în regiunea respectivă. Acest lucru asigură că zonele problematice sunt eșantionate mai intensiv.
4. Verificări statistice: La baza tuturor metodelor se află o bază statistică. Planificatorii se asigură adesea că numărul și amplasarea eșantioanelor îndeplinesc cerințele statistice de bază pentru reprezentativitate. De exemplu, aceștia pot verifica dacă fiecare zonă are o suprafață minimă sau dacă eșantioanele sunt dispersate pentru a evita gruparea.
Unii folosesc simulări Monte Carlo sau statistici spațiale pentru a valida faptul că este probabil ca designul planului să surprindă variabilitatea terenului. Scopul este de a evita eșantionarea părtinitoare; prin generarea automată de puncte, sistemul elimină problema comună a “eșantionării de convenție” (prelevarea de probe doar acolo unde este ușor de mers pe jos) și, în schimb, urmează modele sistematice sau aleatorii dictate de date.
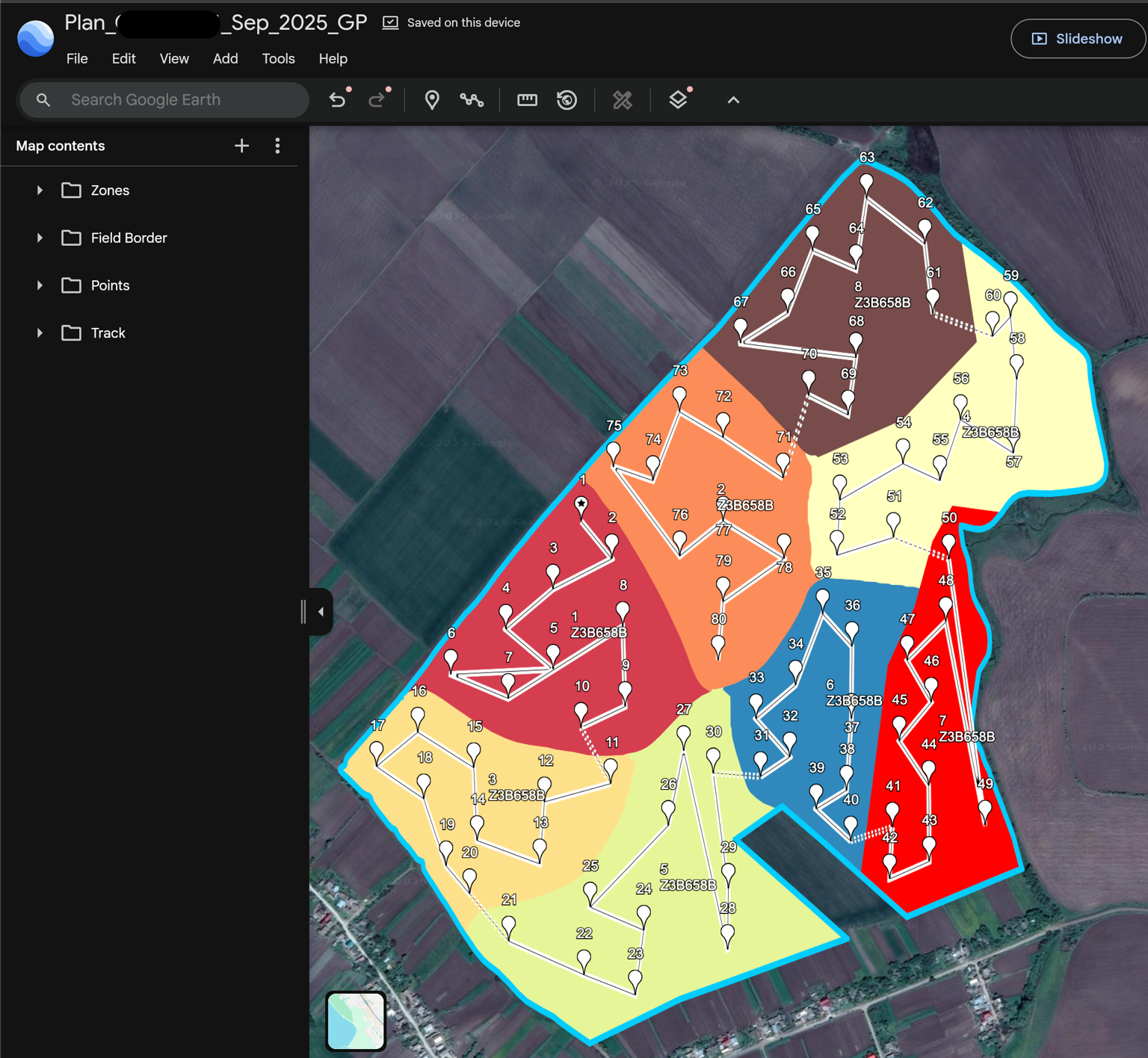
În multe sisteme, algoritmul rulează o singură dată după ce toate straturile și parametrii sunt setați. De exemplu, o aplicație bazată pe cloud ar putea rula în câteva secunde și ar putea genera o hartă cu puncte roșii și galbene în fiecare zonă (vezi figura de mai jos). Aceste puncte reprezintă locul unde ar trebui prelevate carotele de sol.
Intern, programul ar putea utiliza instrumente comune de grupare (de exemplu, K-means, fuzzy c-means) sau euristici personalizate pentru a echilibra plasarea punctelor. Odată ce zonele sunt definite, multe instrumente utilizează modele geometrice simple (de exemplu, linii centrale sau zig-zaguri) în cadrul fiecărei zone pentru a spația punctele de eșantionare efective.
C. Rezultate și rezultate preconizate
În sondajele din 2024, peste 70% de servicii de agricultură de precizie au raportat că exporturile automatizate (rute GPS, foi de etichetare de laborator) s-au numărat printre cele mai apreciate caracteristici. Transferul fără probleme de la plan la câmp devine un factor de diferențiere în software-ul agricol. Rezultatul final al unui planificator automat de eșantionare este de obicei un set de instrucțiuni concrete pentru echipa de teren, inclusiv:
1. Hartă georeferențiată a punctelor de prelevare: Aceasta este de obicei o hartă (PDF, strat GIS sau traseu dintr-o aplicație mobilă) care arată locația fiecărei miezuri de sol prin coordonate GPS. Poate afișa zone colorate și puncte numerotate. Tehnicienii de teren folosesc această hartă pe o tabletă sau pe o imprimare pentru a naviga pe teren. Unele sisteme exportă chiar și către aplicații GPS-NAV populare sau în formate (cum ar fi ISOXML) care se încarcă automat în căștile pentru agricultură de precizie.
2. Protocol de eșantionare/Ordin de lucru: Acesta este un ghid scris care descrie modul de executare a planului. De obicei, include instrucțiuni privind densitatea probelor (de exemplu, “luați 5 carote pe zonă”), adâncimile (de exemplu, 0–6 inci, 6–24 inci), instrumentele de prelevare necesare și convențiile de etichetare. Poate indica care puncte sunt probe “de carotă” (fiecare prelevată individual) sau “compozite” (mai multe sub-carote amestecate). Software-ul poate genera etichete de laborator sau etichete pentru pungi cu ID-uri unice corespunzătoare fiecărui punct.
3. Șabloane de import de date: După ce probele sunt colectate și testate în laborator, rezultatele trebuie reintegrate în planificator. Multe sisteme oferă un șablon Excel sau CSV în care rezultatele de laborator pot fi introduse rând cu rând (un rând per punct). Când șablonul este încărcat înapoi, software-ul reconectează automat datele despre sol la coordonatele hărții. Aceasta închide bucla, permițând generarea instantanee a hărților proprietăților solului. Planificatoarele automate gestionează adesea acest lucru fără probleme, astfel încât noile date sunt introduse direct în sistemul GIS sau VRA (aplicare cu rată variabilă) al fermei.
Aceste rezultate asigură că planul poate fi executat cu un minim de confuzie și că datele revin gata pentru luarea deciziilor. Unele instrumente avansate chiar imprimă automat fișiere de ghidare GPS și etichete de laborator. Cheia este un flux de lucru integrat: odată ce datele sunt în sistem, planificatorul se ocupă de partea grea a analizei și pur și simplu transmite instrucțiuni clare echipei.
Fluxul de lucru pentru planificarea automată a eșantionării solului (pas cu pas)
Până în 2025, principalii furnizori de software pentru ferme de precizie raportează că peste 60% dintre utilizatorii lor generează planuri de eșantionare a solului ca parte a operațiunilor de rutină. Mulți fermieri tratează acum planificarea eșantionării ca pe o etapă anuală standard, mai degrabă decât ca pe un proiect special. Această adoptare tot mai mare subliniază importanța înțelegerii fluxului de lucru de mai jos. Un proiect tipic automat de eșantionare a solului urmează o secvență clară de pași. Aceștia sunt adesea încorporați în aplicația de planificare ca un proces ghidat:
i. Definiți obiectivele: Înainte de planificare, utilizatorul specifică motivul eșantionării. Este vorba despre construirea unei hărți detaliate a nutrienților pentru fertilizarea cu doză variabilă? Pentru a stabili o bază pentru sănătatea solului? Pentru a investiga o zonă cu focar de boli? Obiective clare (de exemplu, “Optimizarea zonelor de îngrășământ cu azot” sau “Verificarea necesarului de doză de var”) ajută la ghidarea setărilor ulterioare.

ii. Încărcarea datelor și selectarea straturilor: Apoi, utilizatorul încarcă sau selectează straturile de date spațiale pe care le va utiliza. De exemplu: harta limitelor câmpului (obligatoriu), plus oricare dintre hărțile de randament, studiile de sol, imaginile NDVI, modelele de elevație etc. Adesea, software-ul este preconectat la date din cloud (cataloage de imagini din satelit sau datele anterioare ale fermei), astfel încât utilizatorul trebuie doar să facă clic pe anii sau straturile pe care să le includă.
iii. Setați parametriiUtilizatorul configurează apoi intensitatea eșantionării. Aceasta poate fi reprezentată de punctele țintă pe acru (de exemplu, 1 punct la 2 acri), numărul de zone dorite (să zicem 3 zone) sau dimensiunea celulei grilei. Utilizatorul poate alege, de asemenea, tipul de eșantionare (grilă vs. zonală, centrală vs. compozită). Unele sisteme permit utilizatorului să pondereze straturile (de exemplu, să acorde o pondere suplimentară hărții pH-ului solului atunci când definește zonele). Acest pas calibrează modul în care se va comporta algoritmul.
iv. Algoritm de rulare (Generare plan): Cu datele și parametrii setați, planificatorul execută analiza. În câteva secunde sau minute, acesta procesează straturile de intrare, delimitează zone sau grile și plasează puncte de prelevare. Rezultatul este un plan preliminar. Sistemele moderne pot afișa o hartă 2D sau o vizualizare 3D a planului.
v. Revizuire și ajustare (opțional): Utilizatorul inspectează apoi planul. Majoritatea programelor permit clicul pe zone sau puncte pentru a se asigura că acestea arată bine. Utilizatorul poate adăuga sau elimina manual puncte, dacă este necesar (de exemplu, poate evita o zonă umedă inaccesibilă sau poate adăuga un punct la un punct rece nou identificat). Unele programe de planificare permit mutarea punctelor sau îmbinarea zonelor din mers. Cu toate acestea, obiectivul este o ajustare manuală minimă - în mod ideal, prima schiță a sistemului este solidă.
vi. Planificarea și pregătirea exportului pentru munca de teren: În final, planul finalizat este exportat în formatele necesare. Harta este trimisă către dispozitivul de teren sau unitatea GPS. Etichetele de laborator și ordinul de lucru sunt imprimate. În acest moment, echipele de teren pot ieși și colecta exact probele indicate. Întreaga etapă de planificare, care obișnuia să dureze ore sau chiar zile întregi din partea agronomului, este acum comprimată în câteva minute de funcționare a software-ului.
Pentru fermele mari sau cooperativele, același flux de lucru poate fi repetat în modul lot. Multe platforme acceptă planificarea pe mai multe câmpuri, ceea ce înseamnă că utilizatorul selectează mai multe câmpuri simultan și generează toate planurile de eșantionare împreună. Acest lucru facilitează extinderea de la un câmp de testare la sute de acri de planificare.
Beneficii cheie ale planificării automate a eșantionării solului
Rapoartele recente din industrie arată că fermele care utilizează planificarea automatizată și-au scurtat timpul de planificare a eșantionării solului cu 80% sau mai mult, iar multe raportează o reducere de 20-30% a costurilor legate de eșantionare în primul sezon. Aceste rezultate din lumea reală reflectă beneficiile descrise mai jos. Planificarea automatizată a eșantionării solului oferă mai multe beneficii majore în comparație cu metodele tradiționale:
1. Eficiență mult mai mare: Prin automatizarea procesului de proiectare, ceea ce dura ore sau zile înainte poate fi realizat în câteva minute. Când toate straturile de date sunt introduse, software-ul rulează algoritmul aproape instantaneu. De exemplu, o platformă promovează faptul că planurile de eșantionare pentru mai multe câmpuri pot fi create “în câteva minute”. Acest lucru reduce drastic timpul alocat tehnicienilor și agronomului. În practică, un singur clic al planificatorului generează zeci de puncte de prelevare cu GPS exact, înlocuind cartografierea manuală laborioasă.

2. Acuratețe și obiectivitate îmbunătățite: Planurile bazate pe date elimină prejudecățile umane. Hărțile zonale tradiționale, trasate cu ochiul liber, pot omite variabilitatea ascunsă; zonele automatizate se bazează pe modele de date măsurate efectiv. Algoritmii asigură că punctele de prelevare acoperă sistematic diversitatea câmpului. După cum notează un specialist de la Extensia MSU, stabilirea zonelor de management pe baza datelor este “critică pentru a se asigura că rezultatele sunt valide și precise”, deoarece ține cont de variațiile spațiale reale. Algoritmii asigură că punctele de prelevare acoperă sistematic diversitatea câmpului.
3. Eficiența costurilor: Prin concentrarea probelor acolo unde contează, este posibil să fie necesare, în general, mai puține carote. Studiile au descoperit că planurile bune de eșantionare zonală pot reduce costurile de laborator, necesitând cu 50-751 de probe mai puține. Fiecare test de laborator al solului costă bani, așadar eliminarea testelor duplicate sau inutile economisește bani. De asemenea, reducerea timpului pe teren (mai puține circuite de mers pe jos) economisește forță de muncă sau combustibil pentru utilaje. Astfel, planificarea automatizată îmbunătățește rentabilitatea investiției pentru testarea solului.
4. Suport decizional mai bun: Eșantionarea de înaltă calitate duce la prescripții de îngrășăminte și decizii de gestionare de calitate superioară. De exemplu, prin utilizarea eșantionării spațiale, fermierii pot ajusta aplicările de var și nutrienți în mod variabil pe teren. Vizualizarea hărților de deficiențe (derivate din eșantionarea densă) ajută la “abordarea eficientă a zonelor problematice” și la “realizarea unor aplicări de nutrienți variabile în spațiu”. Pe scurt, date mai bune despre sol permit rate mai precise de P, K, var etc., crescând randamentele sau economisind costurile de producție.
5. Scalabilitate: Planificatoarele automate sunt ușor de scalat. Pot gestiona un singur câmp mic sau zeci de câmpuri fără efort suplimentar. Funcțiile multi-câmp înseamnă că un consultant poate încărca 100 de câmpuri și genera automat 100 de planuri. Acest lucru este potrivit pentru fermele mari sau serviciile agricole care oferă testare a solului la scară largă. Pe măsură ce operațiunile agricole cresc, același flux de lucru funcționează fără a adăuga povară manuală.
Planificarea automatizată transformă eșantionarea solului dintr-o sarcină greoaie într-un flux de lucru eficientizat pentru colectarea datelor. Aceasta permite fermierilor și agronomilor să obțină hărți ale solului mai bune, mai rapid și mai ieftin, ceea ce, la rândul său, îmbunătățește eficiența fertilizării culturilor și a gestionării terenurilor.
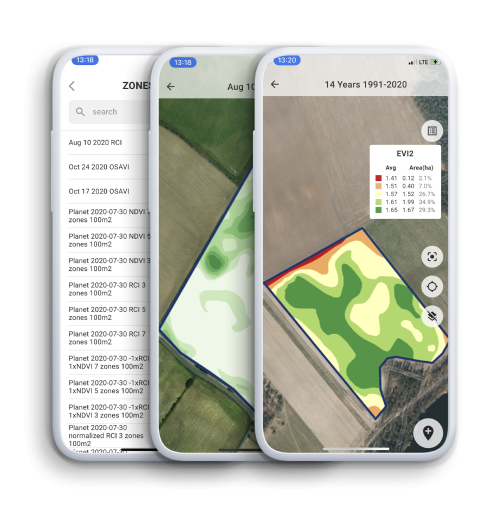
Cum ajută software-ul GeoPard la planificarea automată a eșantionării solului?
Software-ul GeoPard aduce automatizare, inteligență și simplitate procesului de prelevare a probelor de sol. Conceput pentru fermieri, agronomi, laboratoare de analiză a solului, comercianți cu amănuntul și dealeri, GeoPard vă ajută să creați planuri optimizate de prelevare a probelor de sol folosind software-ul în doar câteva minute - pentru un singur câmp sau pentru o întreagă fermă. Cu Tutorial software de prelevare a probelor de sol GeoPard, puteți alege între eșantionarea bazată pe grilă sau pe zone, puteți selecta metode de bază sau compozite și puteți permite algoritmilor bazați pe inteligență artificială să plaseze automat puncte de prelevare, să calculeze rute, să imprime etichete de laborator și să exporte hărți gata de utilizare.
1. Planificare mai inteligentă, rezultate mai rapide
Fluxul de lucru al software-ului GeoPard face planificarea eșantionării solului ușoară și eficientă:
- Începeți un nou plan – Selectați unul sau mai multe câmpuri sau copiați setările din planurile anterioare pentru consecvență.
- Alegeți tipul de eșantionare – Alegeți eșantionarea bazată pe grilă pentru o acoperire uniformă sau eșantionarea bazată pe zone pentru a vă concentra pe variabilitatea câmpului.
- Setați stilul eșantionului – Alegeți materiale compozite pentru eficiență a costurilor sau eșantionare de probe pentru analize detaliate ale solului.
- Configurați punctele și calea – Logica inteligentă a GeoPard plasează punctele folosind algoritmi adaptivi precum Recomandare inteligentă, Linie centrală, N/Z sau modele W.
- Optimizați rutarea – Selectați Smart Optimal Path pentru eșantionatoare automate sau rutare Zonă cu Zonă pentru echipe manuale.
- Imprimare și export – Imprimați etichete personalizate de laborator și exportați planuri în format KML sau Shapefile pentru navigare GPS.

2. Funcții inteligente care economisesc timp
Software-ul GeoPard bazat pe inteligență artificială se adaptează automat la forma, variabilitatea și datele fiecărui câmp. Puteți controla dimensiunea grilei, numărul de puncte per zonă, adâncimea eșantionului și unghiurile de rotație — asigurând o acoperire de eșantionare precisă, dar eficientă.
Planificarea pe mai multe câmpuri permite consultanților sau fermelor mari să genereze mai multe planuri de eșantionare a solului simultan, menținând consecvența în diferite anotimpuri și regiuni.
3. Executați planuri pe teren cu GeoPard Mobile
Aplicația mobilă GeoPard permite echipelor de teren să efectueze eșantionarea fără probleme. Puteți vizualiza hărți, naviga la fiecare punct și marca eșantioanele ca finalizate - chiar și offline. Aplicația acceptă, de asemenea, urmărirea în timp real, luarea de notițe și imprimarea etichetelor direct de pe dispozitivele mobile.
4. Etichetare și export simple
GeoPard simplifică etichetarea cu șabloane automate bazate pe zone sau puncte. Utilizatorii pot descărca și imprima etichete PDF predefinite pentru saci de sol sau probe de laborator, menținând trasabilitatea fiecărei carote. Planurile și rutele pot fi, de asemenea, exportate în aplicații de navigare, asigurând o execuție fără probleme de la planificare până la livrarea în laborator.
5. De ce aleg profesioniștii software-ul de prelevare a probelor de sol GeoPard
- VitezăCreați planuri de prelevare a probelor de sol în câteva minute.
- AcuratețeAlgoritmii inteligenți optimizează fiecare punct de eșantionare.
- FlexibilitateSuportă atât eșantionarea pe grilă, cât și pe zonă, metode de bază și compozite.
- ScalabilitatePlanificați pentru un câmp sau pentru sute.
- Eficiență pe terenNavigare offline și urmărire live a progresului.
GeoPard transformă prelevarea de probe de sol într-un flux de lucru simplificat, bazat pe date. Cu planificare bazată pe inteligență artificială, rutare inteligentă și instrumente mobile integrate, ajută utilizatorii să colecteze date despre sol mai fiabile - mai rapid și mai consistent. Face planificarea automată a prelevării de probe de sol mai inteligentă, mai rapidă și mai pregătită pentru viitorul agriculturii de precizie.
Considerații practice pentru implementare
Un studiu din 2025 a constatat că peste 30% dintre proiectele agricole de precizie eșuate s-au datorat integrității scăzute a datelor sau neconcordanțelor dintre software și hardware. Acest lucru subliniază cât de importante sunt următoarele aspecte practice atunci când se implementează planificarea automată a eșantionării. Deși beneficiile sunt clare, utilizarea cu succes a planificării automate a eșantionării depinde de câțiva factori practici cheie:
1. Calitatea datelor este crucială: Dacă intră gunoi, ies gunoi. Planul automatizat poate fi la fel de bun ca datele introduse în el. Dacă hărțile de randament au erori GPS sau dacă un strat de studiu al solului este învechit, zonele rezultate ar putea fi înșelătoare. Experții în agricultura de precizie pun accent pe gestionarea atentă a datelor: colectați și calibrați întotdeauna datele sursă.

De exemplu, o calibrare deficitară a monitorului de randament sau câmpurile etichetate greșit pot duce la prescripții greșite ulterioare. Un articol de extindere le reamintește direct cultivatorilor: “Cu toții am auzit expresia ‘dacă intră gunoi, ies gunoi’. Datele inexacte sau greșite pot avea ramificații pe parcursul a mulți ani.” Cu alte cuvinte, investiți timp în curățarea și validarea datelor introduse înainte de a rula planuri automatizate.
2. Software și platforme: Aceste instrumente vin în diverse forme. Unele sunt programe GIS desktop independente; altele sunt aplicații cloud sau mobile. Multe platforme cloud pentru agricultura de precizie (de exemplu, Trimble Ag Software, Climate FieldView, FarmLogs sau instrumente specializate precum GeoPard sau AgLeader SMS) includ acum module de eșantionare automată.
Fermierii sau consultanții ar trebui să aleagă o platformă care se integrează bine cu sistemele lor existente. Aceasta ar trebui să importe formate de date comune (fișiere shapefile, yield .csv, imagini) și să le exporte în unități GPS sau aplicații de cartografiere. De asemenea, luați în considerare costul/abonamentul: unele servicii percep taxe per abonament sau per acru.
3. Compatibilitate hardware și export: Un plan este util doar dacă persoana care preia probele îl poate urma. Asigurați-vă că formatul de ieșire (hărți, fișier GPS sau date din aplicație) funcționează cu dispozitivele dvs. de teren. Multe sisteme exportă direct către tablete mobile sau instrumente RTK-GPS. Altele ar putea oferi fișiere KML sau shapefile care pot fi încărcate în aplicații de navigare generice. Verificați dacă etichetele și fișele tehnice ale laboratorului corespund așteptărilor laboratorului dvs. de sol. În esență, întregul lanț - de la planificare la colectarea probelor și analiza în laborator - ar trebui să fie conectat.
4. Integrare în fluxul de lucru al agriculturii de precizie: Eșantionarea solului este o etapă în ciclul mai amplu al agriculturii de precizie. După planificare (Planificare) urmează Eșantionarea (executarea lucrărilor pe teren) → Analiza (trimiterea probelor la laborator, obținerea rezultatelor) → Prescrierea (utilizarea datelor pentru a realiza hărți de aplicare) → Aplicarea (aplicarea cu doză variabilă pe teren). Planificarea automată ar trebui să se integreze fără probleme în acest ciclu.
De exemplu, odată ce rezultatele sunt primite, datele ar trebui să fie integrate în software-ul de gestionare a nutrienților sau în instrumentele de îngrășăminte VR. Un software bun de planificare se va integra adesea cu aceste sisteme. MSU Extension notează că, după eșantionare, vizualizarea rezultatelor permite o aplicare eficientă: de exemplu, fermierii pot varia dozele de var sau îngrășământ în diferite zone pe baza hărților de laborator.
5. Instruirea și aderarea utilizatorilor: În cele din urmă, adoptarea planificării automatizate înseamnă încredere în tehnologie. Managerii de ferme și agronomii ar putea avea nevoie de instruire pentru a înțelege cum sunt generate zonele. Este înțelept să începeți cu studii pilot: rulați planul automatizat în paralel cu un plan manual testat și verificat pentru un câmp și comparați rezultatele.
În timp, pe măsură ce utilizatorii văd timpul economisit și (în mod ideal) consecvența îmbunătățită, încrederea va crește. În multe studii de caz, cultivatorii constată că zonele derivate obiectiv se aliniază adesea cu intuiția lor ulterior - dar necesită mult mai puțin efort pentru a fi produse.
Tendințe viitoare în eșantionarea automată
Până în 2025, previziunile pieței estimează că piața combinată pentru roboții autonomi de teren și instrumentele de planificare precisă a solului va depăși 1,2 miliarde USD, cu o creștere de două cifre pe an. În paralel, primele teste arată că roboții de prelevare de probe pot atinge puncte GPS cu o eroare <10 cm, depășind performanțele echipelor manuale aflate sub vegetație densă. Aceste semnale indică direcția în care se îndreaptă industria. Domeniul prelevării de probe de sol continuă să evolueze rapid. Chiar și dincolo de algoritmii de planificare automatizată, observăm la orizont câteva tendințe interesante:
1. Inteligența artificială și învățarea automată: Dincolo de simpla grupare, se aplică metode avansate de inteligență artificială. De exemplu, cercetătorii dezvoltă instrumente care utilizează învățarea profundă pe imagini satelitare istorice pentru a prezice condițiile solului și a sugera puncte de prelevare. Universitatea de Stat din Mississippi face parte dintr-un proiect finanțat de USDA-NIFA, care cuprinde 11 instituții și care are ca scop dezvoltarea “Designului de eșantionare a solului bazat pe sateliți” (S3DTool).
Acest sistem va folosi un algoritm de învățare profundă bazat pe imagini satelitare multianuale pentru a recomanda automat locații de prelevare a probelor, învățând practic din datele satelitare anterioare care zone necesită prelevare a probelor. Dacă vor avea succes, astfel de instrumente bazate pe inteligență artificială ar putea face planificarea și mai autonomă și predictivă, ținând cont de modelele subtile ale vremii și culturilor în timp.
2. Senzori în timp real și proximali: Cercetătorii și companiile explorează senzori mobili care ar putea reduce nevoia de miezuri fizice. De exemplu, senzorii optici montați pe echipamente pot măsura continuu reflectanța culturilor sau a solului. Senzorii de conductivitate electrică remorcați pe câmp pot crea hărți ale texturii solului din mers.
În viitor, este posibil ca o semănătoare sau o mașină de stropit să fie echipată cu sonde de sol care prelevează automat probe pe măsură ce se deplasează. Aceste date ar putea fi introduse direct în sistemul de planificare (sau chiar ar putea înlocui miezuri discrete) pentru o cartografiere aproape continuă a solului. După cum notează un blog despre agricultura de precizie, avem deja senzori precum Greenseeker sau Veris EC care creează hărți la scară foarte fină - tendința este de a le cupla cu analize în timp real.
3. Eșantionare robotică autonomă: Dincolo de planificare, apar sisteme de prelevare a probelor complet autonome. În loc de un tehnician cu o sondă, unele ferme vor folosi vehicule robotizate pentru a colecta probe precis în punctele GPS planificate. Companii precum RogoAg comercializează deja sisteme de prelevare a probelor de sol autonome, cu ghidare RTK-GPS, pentru a ajunge la locații exacte de fiecare dată (în testele pe teren, sistemele de prelevare a probelor robotizate au atins o precizie și o consecvență mai mari decât operatorii umani).
Pe măsură ce acești roboți devin comuni, fluxul de lucru pentru eșantionare ar putea deveni cu adevărat pasiv: planificare automatizată → implementare robot → colectare automată a probelor → etichetare a probelor. Acest lucru va crește considerabil randamentul testelor de sol. Deși este încă o tehnologie nouă, studiile experților sugerează că robotica (în plivirea buruienilor, cercetarea etc.) este în creștere - iar eșantionarea solului este o alegere naturală pentru automatizare, deoarece fiecare locație a probei este un punct GPS.
4. Platforme decizionale integrate: În cele din urmă, ne așteptăm ca planificarea eșantionării să fie o parte a sistemelor integrate de management agricol din ce în ce mai mari. Platformele viitoare ar putea nu doar să proiecteze puncte de prelevare, ci și să analizeze imediat datele returnate, să se conecteze cu piețele de îngrășăminte, prognozele meteo și modelele agronomice.
De exemplu, o viziune este un sistem care monitorizează tendințele sănătății solului de la an la an, ajustând automat intensitatea eșantionării pe baza tendințelor anterioare sau a riscului de randament. Acest lucru va necesita canale de date - analize bazate pe inteligență artificială, cloud computing și conectivitate IoT. Pe scurt, “Ferma Inteligentă” de mâine va trata eșantionarea solului ca pe un proces continuu, automatizat, integrat cu totul, de la tractoarele GPS la fluxurile de date meteorologice.
Concluzie
Planificarea automată a eșantionării solului reprezintă o convergență puternică între agricultură și știința datelor. Prin valorificarea GIS, a senzorilor și a algoritmilor inteligenți, aceasta transformă eșantionarea solului dintr-o sarcină plictisitoare într-un proces rapid, precis și scalabil. Fermierii și agronomii care utilizează aceste instrumente pot obține imagini mai precise ale fertilității solului lor, economisind în același timp forță de muncă și costuri. În practică, aceasta înseamnă hărți ale solului mai bogate, fertilizare mai bine direcționată și, în cele din urmă, culturi și soluri mai sănătoase.
Pe măsură ce agricultura de precizie continuă să avanseze, ne așteptăm la o integrare și mai strânsă a eșantionării solului cu analiza în timp real și robotica. Deocamdată, chiar și planificarea automatizată de bază oferă un avantaj semnificativ: planurile care înainte durau ore întregi pot fi realizate în câteva minute, cu asigurarea că fiecare cot al câmpului este luat în considerare. Pentru orice cultivator interesat de o gestionare mai inteligentă a nutrienților, înțelegerea și adoptarea planificării automate a eșantionării solului reprezintă un pas esențial către o eficiență și o sustenabilitate sporite.
Date de sol